
衛星から送信される三搬送波電波信号と電離層補正とを用いるリアルタイムナビゲーションの方法およびシステム
本発明は、ユーザの位置を決定するために、衛星(SAT1−GPSEE1〜ASATn−GPSEEn)から送信される、異なる3つの周波数の三搬送波電波信号を用いて移動体(SUR)の位置を特定するリアルタイムナビゲーションの方法に関する。方法は、エクストラワイドレーン搬送波位相曖昧さを決定する第1のステップと、長経路位相曖昧さを推定する第2のステップと、複数の周波数のうちの1つの位相曖昧さを決定する第3のステップとを含む。追加ステップの1つでは、第3のステップの間に電離層補正をリアルタイムで適用する。前記電離層補正は、地上固定基準局(REF−REFE)によって計算される前記電離層の常時更新される電離層モデルに基づき、いわゆるマスタ地上固定基準局(REFM−REFME)によって計算される測地データと組み合わせられる。本発明は、前記方法を実施するためのシステムにも関する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星から送信される三搬送波電波信号と電離層補正とを用いるリアルタイムナビゲーションの方法およびシステムに関し、より詳細には、連続的に更新されるリアルタイム電離層モデルを用いて得られる補正に関する。このモデルは、たとえば三次元ボクセルモデルのように実装される、衛星ナビゲーションシステムからのデータに基づくモデルである。
本発明は、特に、後述するように、一般に数百kmあるいはそれ以上の程度の距離において10cm以内の精度を有する高精度の瞬時ナビゲーションの分野に適用可能である(ただし、その分野だけには限定されない)。
以下、例示を目的として、本発明の好ましい応用に焦点を当てるが、いかなる形でも本発明の範囲を限定するものではない。
【背景技術】
【0002】
静止しているか、移動している「物体」の正確な測位、および物体が移動している場合は、物体の位置、運動、運動方向、および/または運動速度に関するデータを得るために、現在一般的に用いられる手法の1つは、地球周回軌道にある人工衛星から送信される電波信号を用いる手法である。「物体」という用語は、車両、船舶、航空機をはじめとして、非常に広範な意味であると理解されたい。簡単のために、以下ではこの「物体」を「移動体」と称する。
前述の測位を得る手法としては、様々な手法が知られている。それらの手法は、宇宙にある複数の衛星(または衛星の集合体。これらの衛星は地上に対して静止していても静止していなくてもよい)の瞬時位置および電波の伝搬速度がわかっていることを特に前提としている。衛星には高精度クロックが搭載されており、送信される信号にはタイムスタンプ情報が含まれる。このタイムスタンプ情報から、送信および受信の正確な瞬間を知ることができる。したがって、ある瞬間において、移動体の視野内にある衛星と移動体との理論上の距離を、電波の伝搬速度と電波が移動体に到達する時間とから決定できる。十分な数の衛星が識別可能であれば、それらにより、基準フレームに対する移動体の座標を、二次元(地球の経度と緯度)あるいはさらに三次元(経度、緯度、および高度/垂直位置)で決定することができる。
ただし、後述するように、様々な要因によって測定誤差が蓄積されるために、計算される距離は概算値に過ぎず、移動体の位置の決定には、用いる技術に応じて、多かれ少なかれ、無視できない程度の不正確さが伴う。
最もよく知られる衛星ナビゲーションシステムの1つは、「GPS」(「Global Positioning System(全地球測位システム)」)と呼ばれるシステムである。
通常、「GPS」(または同様のシステムの)衛星は、一般にL1(搬送波周波数1.575GHz)およびL2(搬送波周波数1.227GHz)と呼ばれる2つの周波数帯で送信を行う。つまり、これらは、衛星に適用される従属的な「二周波数」である。
当業者にはよく知られている方法に従って、これら2つの周波数を用いることにより、基準フレームに対する移動体の位置を決定する精度を高めることができるが、そのためには、より複雑で、より高コストの「GPS」受信機が必要になる。
位置決定に用いられる方法は主に2つある。リアルタイムで決定する方法と、事後に決定する方法である。事後の決定は、いわゆる「後処理」を実行することによって行う。リアルタイムで決定する方法は、一般に「シングルエポック」決定(この用語は後で使う)、あるいは瞬時決定と呼ばれ、「エポック」の一回の観察の間に計算を行う。事後に決定する方法(「後処理」)は、精度を高めることができる。ただし、事後に決定する方法は、遅い移動体(たとえば、船舶)に対しては特に目立つ弱点がないが、非常に速い移動体(たとえば、航空機)には不適である。
衛星から送信される信号と、位置がよく知られている地上固定基準局からの信号とを結合することによって、精度をより高めることができる。ただし、移動体が長距離を移動する場合は、その固定基準局のネットワークを比較的密にする必要がある。特に、移動体の位置決定に高い精度が求められる場合にはそのようにしなければならず、それに応じてシステム全体のコストも上がる。
さらに、様々な誤差要因のうち、考慮する距離が数十km以上になる場合には、搬送波位相曖昧さの瞬時決定能力に影響を及ぼし、したがって、前述の「GPS」システムなどの二周波数全地球ナビゲーション衛星システムによる、1cmのレベルの精度でナビゲーションを実現する能力に影響を及ぼす主要な問題の1つが、電離層屈折差である。この特性は、「GALILEO」システムや「Modernized GPS」システムのような、今後出てくる三周波数システムについても依然あてはまる。
現在計画されている三搬送波システムは、本質的に、最低限の数の測地計算で、瞬時曖昧さ決定における成功率および完全性が高いという潜在的優位性をもたらす。これは特に、より多くの様々なデータ(すなわち、前述の三周波数に関連するデータ)が利用可能になり、それに伴って、瞬時(「シングルエポック」)曖昧さ決定を行える可能性が高まることによる。
しかし、やはり、この決定は、後述する電離層屈折の影響を深刻に受ける可能性がある。
移動体(特に長距離を移動する移動体)の位置の瞬時決定の精度を高めるためには、特に電離層屈折の有害な影響を減らすことを可能にする手法を実装することが依然として必要である。
先行技術においては、この必要を満たす様々な方法が提案されてきた。
たとえば、「TCAR」(三搬送波曖昧さ決定)と呼ばれる方法がある。この方法は、U.VOLLATHらの論文「ANALYSIS OF THREE−CARRIER AMBIGUITY RESOLUTION(TCAR)TECHNIQUE FOR PRECISE RELATIVE POSITIONING IN GNSS−2」(発表:「Proceedings of the ION GPS」、1998年、IX−O−13、1〜6頁)で説明されている。
また、「CIR」(カスケード整数決定)と呼ばれる方法もある。この方法は、Jaewo JUNGらの論文「Optimization of Cascade Integer Resolution with Three Civil GPS Frequencies」(発表:「Proceedings of the ION GPS 2000」)で説明されている。
これら2つの方法は、基本的なアプローチがほぼ同じである。すなわち、電波の周波数ビートを計算することにより、整数の二重差曖昧さを連続的に決定する。この計算は最長ビート波長から最短ビート波長にかけて実行され、これには、いわゆる「ワイド」レーン搬送波位相と「エクストラワイド」レーン搬送波位相(それぞれ波長が7.480mと0.862m)の組み合わせと、「L1周波数」(波長0.190m)における第1の搬送波が含まれる。
「TCAR」法は、特に、曖昧さの完全な組を(「シングルエポック」モードで)瞬時に解決することを試みるシンプルなアプローチを構成する。ただし、「TCAR」の性能は、距離に応じて発生する、電離層屈折による干渉性の低下の影響を強く受ける。実際、後述するように、(二周波数システムの場合と同様に)電離層遅延の二重差の値が0.26TECU(L1の場合は4cmの遅延に対応)を超えると、電離層遅延が問題になる。
「TECU」は、電離層の特定の電気的特性を記述する際に用いられる単位である。本質的に、電離層は、電子の総数すなわち「TEC」(「Total Electron Content(全電子数)」を表すマップを用いて記述できる。このマップは、垂直方向の電子数の積分を緯度および経度の関数として表したものである。TECの単位は「TECU」(「TEC Unit(TEC単位)」)である。1TECUは、観測されている衛星の観測線に沿う円筒(断面積1m2)に1016個の電子が含まれることを表す。電離層中の荷電粒子は太陽によって生成される。その輻射強度は、当該時刻の関数として自然に変化する。地球が電離層の下で自転しているので、「TEC」マップは、太陽に対して固定されている基準フレームを表すものと一般に考えられているが、時間の関数として変化する。
「GPS」データから計算された垂直方向の遅延の電離層(「TEC」)マップを調べることによってわかるように、前述のしきい値は簡単に超えられる。そのようなマップは、たとえば、「ジェット推進研究所(Jet Propulsion Laboratory)」、ベルン大学(the University of Bern)、その他で作成され、「米国大気研究大学機構(University Corporation for Atmospheric Research)」や他の同様の組織によってインターネット上で公開されている。
そこで、「TCAR」法をさらに改良するために、「ITCAR」(「Integrated TCAR」)と呼ばれる統合型の手法が開発された。この手法は、たとえば、前述のVOLLATHらの論文で説明されている。
この手法は、検索アルゴリズムおよびナビゲーションフィルタを用い、曖昧さが出力信号の一部であり、残留電離層誤差を大まかに推定する。これらの手法の詳細については、その論文を参照されたい。
ただし、「ITCAR」手法は大幅な改善ではあるものの、電離層屈折の二重差を認識しないことによる影響に関しては変わりがなく、それによって、数十kmを超える距離における曖昧さ決定の成功率が制限される。これについては、VOLLATHらの論文「Ambiguity Resolution Using Three Carriers−Performance Analyzing Using 'Real' Data」(発表:「GNSS Symposium」、Seville、2001年5月)で説明されている。
さらに、基準フレームに対する移動体の位置の決定精度を高める目的で、固定局のネットワークによって生成される「二周波数」データから得られる、電離層のリアルタイム電離層モデルを、測地プログラムからのデータと結合し、そのようなデータを用いて電離層補正を実行することも提案されている。この方法は、「GPS」タイプの二周波数システムにおけるリアルタイムの曖昧さ決定ではある程度成功している。
このタイプの方法の1つである、「WARTK」(「Wide Area Real−Time Kinematics」)と呼ばれる方法が、たとえば、Hernandez−Pajaresらの論文「Tomographic Modeling of GNSS Ionospheric Corrections:Assessment and Real−Time Applications」(発表:「ION GPS」、2000年9月19〜22日、616〜625頁)で説明されている。この方法は、確かに、電離層中を伝搬する電波が受ける擾乱の有害な影響を弱めることを可能にし、したがって、位相曖昧さ決定および基準フレームに対する移動体の位置決定の成功率を大幅に高めることを可能にする。ただし、この方法は、前述のモデルをリアルタイムで生成すること、および距離計測に適用する電離層補正をこれもリアルタイムで決定することのために、大量の計算を必要とする。
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、(前述のものを含む)先行技術の方法およびシステムの弱点を克服しようとするものである。
【課題を解決するための手段】
【0004】
本発明の目的は、衛星から送信される三搬送波電波信号と、輻射電波が通り抜ける領域を示す電離層モデルのデータと測地データとを結合して得られる電離層補正とを用いて、高精度リアルタイムナビゲーション(代表値で10cmより高い精度の、移動体の位置決定)の方法を提供することである。
この目的のために、本発明の第1の重要な特徴にしたがって、衛星から送信される三搬送波の位相の曖昧さを瞬時に(「シングルエポック」で)決定する、前述の「TCAR」タイプのシンプルな方法を用いる。高精度のリアルタイム電離層補正が、写実的な電離層モデルに基づいて、固定基準局によって生成される。これらの電離層補正が、それらを「TCAR」に取り込むユーザに送信される。
本発明には、重要な利点が3つある。
本発明に固有の機能により、最寄りの基準局から非常に遠い位置においては、長距離に対する「ITCAR」法の性能より良好な性能が得られる。本発明による方法では、一般に、最寄りの局から100kmを超える距離において90%を超える曖昧さを瞬時決定することが可能であり、60km程度の距離であれば、あまり好ましくない運用条件(電離層の値が低く、太陽光線が最大である条件)の下でもほぼ100%の決定が可能である。同等な条件の下での、三周波数を用いる先行技術の方法で達成できる成功率は、代表値で60%程度に過ぎない。
この後者の特徴が非常に有利であることは簡単に理解できよう。本発明による方法では、地上固定基準局の非常に密なネットワーク(100km程度離れている局の群)を設置する必要がないからである。その結果、全体として大幅な節約が可能になる。たとえば、ヨーロッパの例では、その大陸をカバーするための基準局の数を、先行技術の方法で得られる移動体の位置決定の精度と同等の精度を維持しながら、基準局の間隔が数十km程度しかないネットワークに比べて99%減らすことが可能である。実際、これだけの設置密度があれば、好ましい用途において本発明の方法が目的としている、10cm以内のナビゲーション精度を得ることができる。さらに、本発明の方法に必要な、地上固定基準局のネットワークは、「EGNOS GNSS」(「European Geostationary Navigation Overlay System−Global Navigation Satellite Systems」)として知られる欧州衛星ナビゲーションシステムで現在設置されているネットワークと非常によく似ている。このシステムは、「IMMERSAT III」衛星の配置に基づいている。このことは、既存の施設または設置作業中の施設と実質的な互換性があることを意味する。
それでもなお、本発明による方法は、「TCAR」法と同様に、きわめてシンプルである。具体的には、本発明による方法は、ユーザ(移動体の受信機)側で必要な計算量が、前述の、二周波数測位システムのために開発された「ITCAR」法および「WARTK」法と比べて少ない。
さらに、観測される衛星から送信される輻射電波が通り抜ける領域の写実的なリアルタイム電離層モデルは、搬送波の位相データだけを用いる。このデータは、「マスタ局」と呼ばれる、基準局ネットワークにおける単一の中心(局の1つをあてることができる)で計算された測地推定値と結合される。
したがって、本発明の主対象は、異なる第1、第2、および第3の周波数の三搬送波電波信号を用いてユーザ(移動体と称する)の位置を決定するリアルタイムナビゲーション方法である。周波数の値は前記第1から前記第3にかけて大きくなる。前記電波信号は、地球周回軌道にあって、前記移動体の視野内にある衛星に搭載された、所与の数の送信機から送信される。前記電波信号は、前記移動体に関連付けられた受信機と、基準局と呼ばれる複数の地上固定局の中の少なくとも1つの地上局に関連付けられた受信機とによって受信される。前記電波信号は、前記地球を取り巻く大気のいわゆる電離層を通り抜け、前記搬送波に位相曖昧さを発生させる擾乱を受ける。本方法は、少なくとも以下のステップを含むことで特徴付けられる。
・第1のステップでは、単一コード値を用いる擬似距離の組み合わせから、前記移動体における、前記第3および第2の搬送波の位相差の、いわゆる「エクストラワイドレーン」曖昧さを決定する。
・第2のステップでは、前記第1のステップで決定した前記「エクストラワイドレーン」曖昧さから、前記移動体における、前記第1および第2の搬送波の位相差の、いわゆる「ワイドレーン」曖昧さを推定する。
・第3のステップでは、前記第2のステップで推定した前記「ワイドレーン」曖昧さから、前記移動体における、前記周波数のうちの1つの曖昧さを決定する。
さらに、前記第3のステップにおいてリアルタイム電離層補正を適用するステップが含まれる。前記電離層補正は、連続的に更新される、前記電離層のリアルタイム電離層モデルに基づく。
本発明の別の目的は、この方法を実現する衛星ナビゲーションシステムである。
以下、添付図面を参照しながら、本発明について詳細に説明する。
【発明を実施するための最良の形態】
【0005】
以下では、いかなる形でも本発明の範囲を限定することなく、特に指定しない限り、本発明の好ましい応用の状況、すなわち、衛星から送信される、周波数の異なる三搬送波電波を用いる高精度衛星ナビゲーション方法と、衛星からの電波周波数輻射によってサウンディングされる領域の写実的なリアルタイム電離層モデルから導出されるリアルタイム補正のケースに焦点を当てる。
以下、本発明による方法の主要ステップを詳細に説明する。説明には、代表的な数値を用いる。主要なステップは、3つの基本ステップからなる。これらは前述の「TCAR」法のステップとよく似ている。それらのステップについて説明する。
ステップ1:
いわゆる「エクストラワイドレーン」曖昧さ(ある例示的実験のデータセットでは波長の代表値が7.5m)を決定するために、「擬似距離」と呼ばれるコードの組み合わせを追加する。
誤差要因として知られているものには、いわゆる「マルチパス」現象が含まれる。擬似距離マルチパスは成功率を下げる可能性があるが、この誤差は、概して、「エクストラワイドレーン」の長波長に比べれば振幅が小さく、通常はこの問題を克服することができる。
実際、「TCAR」方式の典型である第1のステップ(たとえば、前述のVOLLATHらの、1998年からの論文を参照)は、位相の組み合わせと同じ電離層依存性の値および符号を共用する「擬似距離」(コード)の組み合わせPewを用いて、「エクストラワイド」レーン搬送波位相の二重差(以下、∇ΔLewと称する)(Lewは「エクストラワイド」レーン搬送波の波長)から、(衛星−受信機ペアの間の)曖昧さの二重差(以下、∇ΔNewと称する)を推定する。「エクストラワイドレーン」の組み合わせから長波長が得られる可能性がある。LewおよびPewの値は、次式によって決定できる。
【0006】
【数1】
ただし、Lxは、周波数がfx、波長がλxの場合の搬送波位相の測定値(長さ単位)である。本明細書の末尾に添付した表1に、Xの値を示した。数字の1〜3は、記載の例の3つの周波数に関連付けられていることを理解されたい。表1は、特定量の関連データ(周波数、波長、電離層依存性、および最大マルチパス誤差)、および本発明による方法の理解に役立つ様々な測定値をまとめたものである。このデータは、3つの周波数帯L1〜L3と、「エクストラワイド」および「ワイド」レーン搬送波位相のLewおよびLwとに、それぞれ関連付けられている。Pxは、対応する「擬似距離」の測定値である。搬送波位相と「擬似距離」のマルチパス誤差および測定誤差は、それぞれ、mx、Mx、εx、およびExとマーキングされている(表1には、最大マルチパス値と代表的な測定誤差もリストされている)。差分されていない搬送波位相曖昧さλxbxは、機器の遅延を含み、二重差分後に、波長λx∇ΔNxの整数倍の値になる。電離層遅延αxIは、衛星から放射されるビームに沿って自由電子密度を前述のように垂直方向にTECU単位で測定したものの積分である「全電子数勾配(Slant Total Electron Content)」(「STEC」)に比例する。式(1)および(2)で、ρ*は、周波数に依存しない項(距離、クロック誤差、対流圏屈折など)を表す。
式(2)には、搬送波位相ワインドアップなどの付加的な小さな項が明示的に表されていないが、次式で表されるように、対応するコードを減算することによって、式(2)から、単一の観測「エポック」における「エクストラワイド」レーン曖昧さ(以下、
【0007】
【数2】
と称する)の二重差を推定することが可能である。
【0008】
【数3】
受信機に影響を与える実質的なマルチパス(通常は3.7m未満)がない場合、そのような評価の誤差限界は、(表1で与えられた値が示すように)0.5サイクル未満であり、それによって、曖昧さをちょうど整数値に瞬時決定することが可能になる。
ステップ2:
第1のステップにおいて得られた、曖昧さがない「エクストラワイドレーン」搬送波位相から、組み合わせの「ワイドレーン」曖昧さを推定する。ほとんどの時間帯において、これら2つの間の差は、「エクストラワイドレーン」曖昧さと、電離層屈折差(記載の例の動作周波数の場合で約0.06サイクル/TECU)とによって構成される。非分散項は除去される。ここでの主な問題は、測定誤差と、搬送波位相信号のマルチパスである。中緯度における、100km未満の基線による電離層屈折差の代表値はほんの数TECUであるが、電離層補正を行うことにより、より長距離で、より困難な電離層状況であっても成功率を大幅に高めることができる。
以下、このステップの主要な詳細を説明する。
第1の「長波長」曖昧さ∇ΔNewが、対応する「擬似距離」を用いて決定されれば、次式
【0009】
【数4】
(ただし、φ1とφ2は周波数がそれぞれL1とL2の場合の位相)で表される「ワイドレーン」の組み合わせLwなどの第2の曖昧さは、∇ΔNewと、搬送波位相の対応する差(表1の対応する定数値を参照)とから、次式にしたがって推定できる。
【0010】
【数5】
本質的には、中程度のマルチパスがあれば、式(5)に対応する誤差項(測定誤差も含む)は、通常、0.3m未満、すなわち、0.4サイクル未満である。曖昧さ決定後に残る誤差項は、例(表1を参照)の周波数の場合、0.0580サイクル/TECUの値における電離層屈折に対応する。この項によって成功率が低下する可能性があるが、「STEC」値の二重差(以下、∇ΔIと称する)が概して10TECU未満である、中緯度で、数百km未満の距離であれば、クリティカルな項ではない。後で図5を参照して、詳細な例を示す。
このような状況であれば、リアルタイム電離層モデルを用いることによって、低緯度における、基線が長い状況での「エクストラワイドレーン」曖昧さ決定の成功の条件が改善される。
ステップ3:
L1と、前に得られた、曖昧さがない「エクストラワイドレーン」との差から、L1位相曖昧さを導出する。このステップでの主な問題は、対応する電離層屈折差(約1.9サイクル/TECU)である。これにより、中緯度で何サイクルもの誤差が発生する可能性がある。
この第3のステップでは、第2のステップとよく似た手順を実施するが、用いるのは、中波長と長波長の搬送波位相差ではなく、短波長と中波長の搬送波位相差である。このことは、次式(6)から明らかである。
【0011】
【数6】
ただし、α1およびαw(大まかにαx)は、記載の例における、表1で定義された電離層係数である。
第3のステップでは、搬送波位相の測定誤差と、中程度のマルチパスとの組み合わせによって新たに誤差(代表値で0.2サイクル未満)が発生する(表1を参照)。ただし、ここでのクリティカルな問題は、短い基線の場合に0.5サイクル(−1.945サイクル/TECU)を超える誤差を発生させることもある電離層屈折差である。
この基本的な制限は、正確な整数曖昧さ評価を確実に行えるように、0.26TECU(すなわち、0.5サイクル×TECU/1.9475)より良好なリアルタイム電離層補正を計算することによって克服できる。これらの補正は、次に説明するステップ4で行う。
ステップ4:
第3のステップで発生する問題を克服するために(つまり、最短波長の曖昧さを決定するために)、電離層屈折差を推定できるリアルタイムモデルを決定する。このモデルは、基準局のネットワーク内の固定の位置における二周波数搬送波位相データから計算される。これによって、衛星から送信される輻射電波が通り抜ける電離層領域の描写が行われると考えてよい。このモデルのデータは、同時に行われる測地計算から導出されるデータと、周知の方法で結合される。その測地計算は、有利なことに、「マスタ」局と呼ばれる、ネットワーク内の地上固定局の1つで実行できる。この手法の主な利点は、変動する電離層条件の下で、最寄りの基準局から何百キロも離れていても、0.25TECU未満の誤差(代表値)で屈折差を推定できることである。この精度であれば、中長距離のL1曖昧さの瞬時決定での誤差は0.5サイクル未満(代表値)である。
自由電子の電離層分布は、分解能体積単位のグリッド(「ボクセル」)によって大まかに決定できる。ボクセル内では、任意の時点での「地球中心を基準にした慣性座標系(Earth Centered Inertial(ECI)system)」内の電子密度が一定であると想定される。
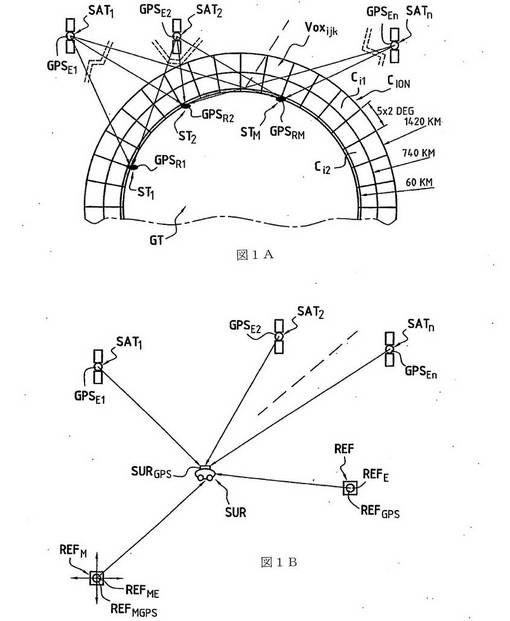
このタイプの典型的な配置を図1Aに示す。この図1Aは、子午線断面のボクセルVoxijkの概略図である(i、j、kは、それぞれ、経度、緯度、高度の座標の添え字である)。この図では、リアルタイム電離層モデルのデータを決定するために、電離層電子密度分布を式(7)にしたがって細分化している。
この図1Aでは、地球GTは、部分断面で示され、電離層CIONで囲まれている。CIONは、2つの中間層Ci1およびCi2に任意に細分化されている。記載の例におけるCi1層の低い高度は60kmであり、高い高度は740kmである。Ci2層の低い高度は740kmであり、高い高度は1420kmである。各ボクセルVoxijkの面角度は、5×2度である。
例示目的で、衛星をSAT1〜SATnで表現し、そのうちの3つを図示した。各衛星は、「GPS」送信機GPSE1〜GPSEnをそれぞれ搭載している。これらの衛星SAT1〜SATnは、すべてまたは一部の地上局(たとえば、図1Aに示した3つの固定基準局ST1〜STM)の視野内にある。各地上局には、「GPS」受信機GPSR1〜GPSRnと、組み込まれた計算手段(図示せず)が含まれる。
図1Bは、移動体SURから見える、本発明によるナビゲーションシステム全体の配置構成を概略的に表している。
このシステムは、EGNOSやWAASのような現在配備されているいくつかのシステムの場合と同様のコンピュータ、インターフェース、および物理リソースを必要とする。
この、本発明による方法を実現するシステムは、衛星(たとえば、図1Aの衛星SAT1〜SATn)から送信される信号を受信する「GPS」受信機SURGPSを含む。これらの三周波数帯信号から、組み込まれた計算手段(図示せず)を用いて前述の「TCAR」法の3つのステップが実行される。
SURGPSはさらに、「GPS」受信機REFGPSを用いて衛星SAT1−GPSE1〜SATn−GPSEnから受信した信号から、基準局REF(図1Aの地上固定基準局のネットワークST1〜STMのうちの最寄りの局)によって決定されたリアルタイム電離層モデルからデータ信号を受信する。局REFは、送信機REFE1を用いて、リアルタイム電離層モデルからのデータを移動体SURに送信する。
測地構成データは、単一のいわゆるマスタ局REFMで決定でき、REFMの送信機REFMEで送信され、移動体SURに配信されて、電離層モデルからのデータと結合される。一般に、この局は、他の地上固定基準局と同様に、「GPS」受信機REFMGPSも有する。測地構成データは、測地モデルのデータと同時に計算される。
よく知られた方法では、電離層の決定は、ランダムな伝搬プロセスのように扱われ、代表値で109〜1010個/m3/
【0012】
【数7】
の電子のプロセスノイズを有する、照明されている各セルi、j、およびk(i、j、kは、既に定義されているように、三次元座標の添え字)の平均電子密度Neを、カルマンフィルタを用いてリアルタイムで決定することにより得られる。限定でない例として、カルマンフィルタを用いるプロセスについては、G.J.BIERMANの著書「Factorization Methods for Discrete Sequential Estimation」(発表:Mathematics in Science and Engineering、Vol.128、Academic Press、New York、1977年)で説明されている。
本発明の方法の重要な特徴によれば、搬送波位相データのみを用いる。したがって、「擬似距離」コードノイズおよびマルチパスは回避される。搬送波位相偏波B1(衛星−受信機ペアごとに搬送波位相データの各連続弧において一定)は、(サイクルスリップ発生時にランダムホワイトノイズプロセスになる)ランダム変数として、同時に推定される。この偏波は、フィルタにおいて、電子密度値との干渉性がリアルタイムで低下する。これは、下の式(7)に示すように、衛星の幾何学的配置が変化し、2種類の未知物のばらつきが小さくなるからである。式(7)は、「GNSS」の衛星−受信機ペアの間に与えられる電離層情報のモデルを表しており、L1およびL2は、長さの単位で表された搬送波位相であり、Li=L1−L2であり、Neは電子密度である。L1は次式で与えられる。
【0013】
【数8】
ただし、値「REC」と「SAT」は、それぞれ「衛星−受信機」ペアのGPS受信機と衛星に関連し、dlは、このペアを結ぶ視線上の基本距離であり、Δsi,j,kは、STECの基本座標面であり、i、j、およびkは、既に定義されているように、三次元座標の添え字である。
この方法は特に、電子密度分布の局所的な特徴を検出する場合に好適であり、通常の方法の場合のように1つの層を用いる代わりに、2つの層を、Global Navigation Satellite System(「GNSS」)からの地上データとともに用いることにより、電子数のモデリングが良好にならないリスクが大幅に減る。
「WADGNSS」(「Wide Area Differential GNSS」)ネットワークの場合は、これらの、式(7)より得られる全電子数勾配(「STEC」)のリアルタイム補正の内容から、
・第1に、局と衛星の二重差∇ΔSTECを、1TECU未満の誤差で形成することと、基準局における第2の(すなわち、「ワイドレーン」)曖昧さを得ることとが可能であり、
・第2に、移動体の受信機において、曖昧さがない値L1、すなわち、∇ΔSTECの非常に精度の高い値を、1TECUの数百分の1のレベルで補間することが可能である。これは、曖昧さの決定後に得られる値に相当する。
この補間された値が0.26TECUより良好であれば、移動体の受信機は、両方の曖昧さをリアルタイムで決定できる。
この方法は、本質的に、Hernandez−Pajaresらの前述の論文(2000年)で発表された、いわゆる「WARTK」法によく似ている。様々な実験を通して、これまで「WARTK」法で得られた成果が、Hernandez−Pajaresらの別の論文「Tomographic Modeling of GNSS Ionospheric Corrections:Assessment and Real−Time Applications」(発表:「ION GPS 2001」、2001年9月)でまとめられている。この方法のより詳細な説明については、これら2件の論文を参照されたい。
この方法を運動学的に利用する場合、最も重大な制限の1つが、電離層擾乱の伝搬すなわち「TID」(「Traveling Ionospheric Disturbances」)などの局地的な不規則性の存在である。これらによって、ネットワーク内の基準局間で電離層補正を線形補間したときの結果が不正確になる可能性がある。移動体からの二周波数データを取り込むことによって性能を改善できる。
さらに、基準局における計算の場合は、距離が長いことと、電子数勾配が急であることも、この方法の性能を制限する可能性がある。そこで、本発明の方法の特徴にしたがって、何千kmも隔てられた固定および/または基準局の場合を含めるために追加手続きが開発された。この手続きは、いわゆる平滑化「ワイドレーン」コードを用いて、電離層モデルを改良し、その結果として、リアルタイム曖昧さ決定を支援するものである。そのような手続きについては、たとえば、Hernandez−Pajaresらの論文「Improving the Real−Time Ionospheric Determination from GPS Sites at Very Long Distances Over the Equator」(発表:Journal of Geophysical Research、2002年)で説明されている。
ただし、移動体の受信機で二周波数「GPS」システムを用いて曖昧さをリアルタイムで決定するために先行技術で用いられている方法は、20cm前後のレベルの比較的良好な位置決定を保証し、自由浮遊電離層偏波結合を決定し、それによって、数分程度の収束時間を経て(前述の「WARTK」法を用いて)曖昧さをリアルタイムで決定できるようにするために、多数の測地計算を必要とする。
本発明は、(特に「WARTK」法に見られる)先行技術の不十分な点を克服することを可能にする。本発明は、(数十〜数百km離れた)基準局間の中長距離での三搬送波位相曖昧さを、最低限の数の測地計算により、決定する瞬時の方法を改良することを可能にする。主な改良は、基準局において連続的に計算される電離層モデルによって供給されるリアルタイム電離層補正を用いる、前述の「TCAR」法の第3のステップに対するものである。
本発明の方法では、前述のステップの一層の改良をさらに実現する。この改良は、1つのコード要素の代わりに、異なる3つの擬似距離コード(以下、P1、P2、P3と称する)を用いることにあり、これによって、「エクストラワイドレーン」曖昧さ決定におけるマルチパス効果の低減が可能になる。
さらに、好ましい実施形態では、最長波長の曖昧さ決定において、擬似距離、「ワイドレーン」、およびL1周波数帯のコードを用いて完全性テストを実行して、誤差に関連する曖昧さ評価のジャンプを検出する。本質的には、前述の第2および第3のステップにおいて、式(5)および(6)から明らかなように、「エクストラワイドレーン」曖昧さ誤差の1サイクルからほぼ8サイクルの「ワイドレーン」誤差が発生し、1サイクルの「ワイドレーン」誤差は、ほぼ4サイクルのL1誤差に変換される。L1は、記載の例における最短波長の搬送波である。多くの場合、これらの曖昧さ評価のジャンプは、検出されるだけの大きさであり、対応するコードを用いてフィルタリングされる。
この、本発明による方法により、誤差が代表値で数cm未満であるナビゲーションが(100kmを超える)長距離では不能になる主な制限を直接克服することが可能になる。
本明細書の末尾に添付した表2は、リアルタイム曖昧さ決定のメインの方法の特徴を、先行技術(「TCAR」、「ITCAR」、「WARTK」)の場合と本発明による場合とで比較し、それをまとめたものである。
ここで、本発明による方法の主要な特徴をわかりやすく示すために、前述の「GNSS」タイプの既存システムにおいて、衛星に搭載されている修正された信号発生器から供給される様々なデータセットに基づいて実施した例示的実験(航空機、「陸上」を移動するユーザ(たとえば、陸上車)、または固定局のシミュレーションを含む)について説明する。実験にあたっては、様々な動的条件および電離層条件を考慮した。
例示のため、かつ、意味のある例を提供するために、陸上車の受信機(以下、移動体SURと称する)の曖昧さのリアルタイム決定について、移動体SURから約129km離れた固定基準局(以下ではREFと称する)を基準として様々な条件から詳細に検討した。記載の例では、1Hzで20分間視野内にある4つの衛星について、「GNSS」システムのシミュレータに採用する3つの周波数を、2つの「GPS」搬送波(それぞれ1575.42MHzと1227.60MHz)と「GLONASS」システムの24チャネル搬送波(1615.50MHz)とで構成し、「AGGA」(「Advanced GPS/GLONASS ASIC」)として知られるタイプの妥当性検査済み受信機の12個の利用可能チャネルを用いた。「AGGA」は、「DNSS」システム信号の電波掩蔽や低地球軌道の決定などの宇宙応用のための高速デジタル信号処理を可能にするデジタル集積回路である。この回路は、「ASIC」(「特定用途向け集積回路」)規格に基づいている(記載の例では、ATMEL T7905E素子)。「GLONASS」(「Global Orbiting Navigation Satellite System」)は、「GPS」システムと同等の、ロシアの衛星ナビゲーションシステムである。
記載の例では、2つの基本データセットについて検討した。1つは、信号電力が最大でマルチパスがない、理想的なケースを構成するセット(以下、「P5−M0」と称する)であり、もう1つは、電力が平均で、マルチパスがあるケースを構成するセット(以下、「P3−M1」と称する)である。
それらのデータセットにおいてシミュレートされている基準局受信機に加えて、「IGS」(「International GPS Service」)ネットワーク内に、200kmを超える距離で存在しているさらに3つの局を、電離層の計算だけのために追加した。これによって、より大きな固定局ネットワークを含む、よりリアルな状況をエミュレートできるようになった。
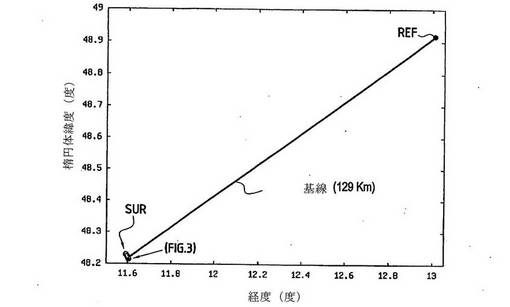
以下では、最も困難なケース、すなわち、「移動体SUR−局REF」ペアが最長基線(約129km)であるケースについて詳細に検討した結果を示す。基準局REFは、図1Aの局ST1〜STMのうちの1つである。
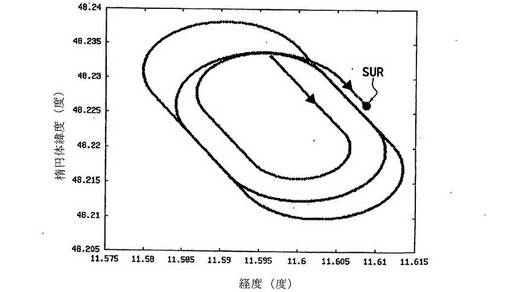
図2はこの例を示し、基線と、座標軸に対する局REFおよび移動体SURの位置を表している。座標軸は、楕円体緯度と経度とを度で区切ったものである。
図3は、図2を拡大(ズーム)したもので、図2と同様の、楕円体緯度と経度とを度で区切った座標軸に対して、移動体SURの軌跡を示している。
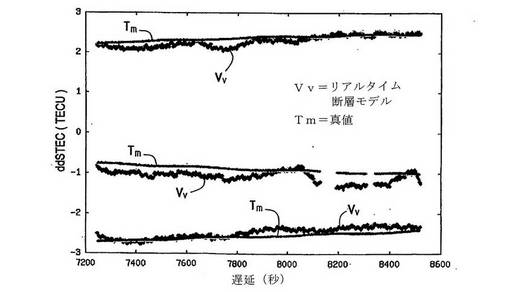
この結果の第1の態様は、電離層フィルタのリアルタイム性能として参照される。図4に、リアルタイム電離層モデルから推定された遅延の例(グラフではTm)を、実際の電離層遅延(グラフではVv)との比較で示した。これらの値は、本発明による方法の機能を示すために実施した実験での測定値に対応する。
さらに、高精度ナビゲーションのためのより重要なパラメータである、移動体SURについての「STEC」(
【0014】
【数9】
)の推定二重差の値と、それらの真値(∇ΔI)との差(すなわち誤差)を図5および6に示した(縦軸の単位はTECUであり、横軸は秒単位で表した遅延である)。
より厳密には、図5は、最も遠く(約129kmの距離)にある受信機(REF)を基準として、本発明の重要な態様の1つによる電離層モデルを用いてリアルタイムで推定した「STEC」の二重差(グラフでは「ddSTEC」)を、移動体SURの受信機における真値との比較で示したものである。
図6は、「STEC」の二重差(グラフでは「ddSTEC」)の、リアルタイム電離層モデルによる決定の誤差を示したものである。電離層モデルの実際の値を、2つの電離層しきい値「Threshold1」(+0.26TECU)および「Threshold2」(−0.26TECU)と比較しており、これによって、第3の曖昧さを決定できる。
誤差がしきい値制限の±0.26TECUに収まる電離層決定は、全体の92%を超えている。したがって、これらは、マルチパスがない場合に3つの曖昧さを決定すること、および測定誤差を考慮しなくてよいことが可能であるための十分な精度を有する。誤差が0.26TECUを超えた、評価の残り8%のほとんどは、低高度かつ南方向で観測された衛星からのものであり、この方向では電離層の勾配が最も急になる。これらの結果は、4つの基準局に対して、南方向についての電離層補正計算を行う第5の局を追加することによって、わずかに改善された。
リアルタイム電離層補正が計算され、基準ネットワークから送信された時点で、ビームごとに3つの曖昧さを推定および同時に(「シングルエポック」モードで)決定するために、本発明による方法の手順を、移動体SURにおいて、記載の方法で実行することができる。
本明細書の末尾に添付した表3と表4に、それぞれ前述のデータセット「P5−M0」と「P3−M1」についての、曖昧さ決定の主な結果をまとめた。「TCAR」法の3つのステップの成功率を、以下の3つのケースについて示した。
(a)電離層補正を行わない場合。
(b)現在の「GPS」システムから送信された、Klobuchar電離層補正モデルによる、対応する電離層補正を行う場合。
(c)本発明の方法による、リアルタイム電離層モデルによる補正を行う場合。
より厳密には、表3に示した例の成功率(%)は、最も遠く(約129kmの距離)にある固定局REFを基準とし、前述の理想的なデータセットP5−M0(受信電力が最大で、マルチパスはなし)を用いた場合の、移動体SURの受信機についての、「エクストラワイドレーン」、「ワイドレーン」、およびL1周波数帯の曖昧さ(それぞれ、∇ΔNew、∇ΔNw、および∇ΔN1)の全3834回のオンザフライ決定テストでの成功率である。
表4は、表3とよく似ており、前述のデータセットP3−M1(受信電力が平均レベルで、マルチパスがある)を用いた場合である。括弧内の数は、全観測数に対する成功率である。
表3および4から明らかであるように、「TCAR」法の3つのステップに、高精度リアルタイム電離層モデルを適用するステップを組み合わせた本発明の方法を用いると、理想的なケース(データセット「P5−M0」:0〜92%)だけでなく、マルチパスがある、より困難なケース(データセット「P3−M1」)においても、瞬時(「シングルエポック」)曖昧さ決定の成功率をかなり上げることができる(∇ΔN1の場合、「Klobucharモデル」型の補正を行っても成功率は35%であるのに対し、本発明の方法にしたがって生成された電離層モデルによる補正を行うと、成功率は92%に達する)。
表4によれば、マルチパスの影響を受けるデータセット「P3−M1」に関する重大な問題の1つは、「TCAR」法による曖昧さ評価(∇Δewおよび∇Δw)の完全性が不足していることである(それぞれ、10%および4%不正確な瞬時決定である)。
この完全性を上げるために、すなわち、搬送波位相が存在するこのケースでは、不正確な曖昧さを織り込む可能性を減らすために、およびマルチパスごとにコード化するために、対応する擬似距離、「ワイドレーン」、およびL1のコードを用いて、「TCAR」法における、前の最長波長の曖昧さ(それぞれ、「エクストラワイドレーン」曖昧さと「ワイドレーン」曖昧さ)に含まれる潜在的な曖昧さ決定誤差を検出するよう試みることが可能である。誤差は、式(5)および(6)に示すように、「エクストラワイドレーン」と「ワイドレーン」のそれぞれにおいて、9波長倍および4波長倍に増幅される。
対応する結果を、本明細書の末尾に添付した表5と表6にまとめた。それぞれ、当該の重大な誤差をフィルタリングするために、擬似距離と、平滑化した擬似距離とを用いている。
表5は表2と似ているが、表5では、曖昧さ決定の成功率を計算する前に、完全性テスト(すなわち、擬似距離から導出された曖昧さとの比較)を受けさせている。これは、「ワイドレーン」およびL1曖昧さにおける大きなジャンプをフィルタリングするためであり、これらのジャンプは、その前の、より大きな波長曖昧さ誤差によるものである。最後の列は、利用可能度を示す。これは、3834回の観測のうちの、擬似距離を用いた事前の完全性テストに合格した割合(%)である。「*」がある、括弧内の数は、完全性テストに合格した後に計算された曖昧さの割合(%)である。前と同様に、括弧内の数は、全観測数に対する成功率である。
表6は、表3と似ているが、完全性テストを実施するために、「単純な」擬似距離の代わりに、平滑化された擬似距離を用いている。
表から明らかであるように、本発明の方法は、平滑化されたコードによる完全性テストを行うことにより、完全性を(表4の79%から表6の91%へと)約20%も改善することができ、利用可能度の低下は(100%から84%へと)比較的小さい(16%)。瞬時(「シングルエポック」)コードを代わりに用いた場合は、完全性がさらに改善され(84%)、利用可能度も上がる(90%)。本発明の方法によるリアルタイム電離層モデルによる補正の代わりにKlobuchar型の周知の「GPS」送信モデルを用いると、結果は大幅に悪化し、利用可能度もほとんどなくなる。
記載した実験に利用可能だったデータセットは、それらが瞬時曖昧さ決定を得るために好適であったという事実にもかかわらず、瞬時(「シングルエポック」)位置の決定においては、非常に制限のあるものであった。実際、実験においては、20分のデータのために視野内で利用可能な衛星が4つしかないため、移動体SURの瞬時ナビゲーション解は、マルチパスのないデータセット(「P5−M0」)で計算しなければならなかった。そして、最低限の4つの衛星を用いてナビゲーションを行うための信号対雑音比は非常に高いものでなければならなかった。さらに、少なくとも第5の衛星が必要であった、対流圏遅延の評価を省略した。さらに、特定の搬送波位相カットオフ構成を基準とする測位決定において、第1の間隔(約7200〜7500秒)をスキップした。これは、この期間に受信機内において測定上の問題が発生する可能性があったからである。一方、電離層補正およびこれに対応する曖昧さ決定の成功率に関して言えば、結果は、データセット「P5−M0」について得られた結果(表3を参照)と実質的に同等である。
これらの制限は、最低限の調整しかできない、既存のシステムから提供されたデータセットを用いたことによるものである。より現実的なデータセット(たとえば、6つ以上の衛星から提供されたデータセット)を用いれば、測位決定におけるこれらの重大な制限は解消されよう。実際、よりよい幾何学的配置(幾何学的「DOP」(「精度低下率」)係数)、ならびに曖昧さ誤差を有する衛星(通常はゼロ、場合によって1つ)を検出してフィルタリングする機能を得ることが可能になる。これは、ナビゲーションフィルタまたは自律的な受信機監視アルゴリズムを用いることにより可能である。
データセットP5−M0に含まれる4つの衛星に対応した結果を図7A〜7Dに示す。これらは、基準局REFから約129km離れている移動体SURについての、調整前の残差(図7A)、ならびに本発明による方法を実施した後の瞬時測位誤差の東成分(図7B)、北成分(図7C)、および垂直成分(図7D)を示している。グラフの縦軸の単位はm、横軸(遅延)の単位は秒である。
比較のために、実際の曖昧さについての対応するデータを図8A〜8Dに示す。
調整前の残差∇ΔLc(図7A)の主な特徴は、L1(約8%:図3を参照)の1サイクルの誤差に対応する約10cmの誤差である。これにより、ジャンプと同等の(「シングルエポック」)ナビゲーション誤差が発生する。これらは、図7B〜7Dにも見られる。これらは、対応する幾何学的「精度低下率」(「DOP」)係数によって増幅される。これらの、L1曖昧さの不正確な評価は、通常、エポックごとに利用可能な各3つ(測位決定に必要な最低数)の二重差のうちの1つに影響を及ぼすので、この誤差は、測位に3回影響を及ぼす(全エポックの約24%、三次元誤差の76%が5cm未満、100%が21cm未満)。誤差の分布はガウス分布ではないが、結果として得られる有効な3次元値(「RMS」)は、東成分、北成分、および垂直成分について、それぞれ7cm、3.5cm、および2cmである。
これらの結果をまとめると、曖昧さが正確に決定された場合(全テストの約92%、全エポックの約77%)の、東成分、北成分、および垂直成分の「RMS」誤差は、それぞれ1cm、1cm、および2cmである。また、曖昧さ決定が不正確なエポックを含む場合の、東成分、北成分、および垂直成分の「RMS」誤差は、それぞれ3cm、5cm、および2cmである。
さらに、搬送波位相二重差と瞬時(「シングルエポック」)ナビゲーション誤差との、調整前の残差計算によって減った測定値を、図8A〜8Dに示す。搬送波位相ノイズの大幅な増大が、特に垂直成分において見られ、約5cmの誤差が発生している。この(三次元「RMS」値の北成分、東成分、垂直成分がそれぞれ3cm、1.1cm、2cmであり、それぞれ約2cm、2cm、4cmではレベルが95%である)軌跡は、第1のエポックの間に曖昧さを正確に決定した後、瞬時(「シングルエポック」)モード解ではなく、リアルタイムフィルタを用いて得ることのできる解を非常に明確に表現する。
(たとえば、通信の潜在的な問題に起因する)電離層補正の遅延時間の影響を特徴づけるために、固定局のネットワークにおける電離層補正の計算について、1〜30秒(30エポック)の遅延を検討した。これらの各遅延について、129kmの距離にある移動体に対する「ddSTEC」(単位:TECU)の精度がちょうど0.26TECUになる場合の成功率を計算した。この成功率を、遅延時間(秒)の関数として、図9に示した。図から明らかであるように、30秒までは、遅延時間にかかわらず90%を超える成功率が達成されるので、遅延時間の影響は無視できる。
図10では、より長い遅延時間について検討したが、ここでは、電離層貫通点同士の近接が維持されるように、基準ネットワークと移動体の補正に対して同時に検討した。明らかに、5分を超えてから成功率が90%から85%へと低下している。10分を超えると、成功率がさらに低下し、75%に達する。これらの値は、電離層遅延差の変動がさらに大きくなる状況では、一層急激に低下する可能性がある。
明らかなことに、本発明による方法は、遅延時間を最大でも約5分(代表値)に保つことができるので、中緯度で遅延時間が重大な問題の原因になることはない。
以上の説明から、本発明が記載の目的を達成するのは明らかである。
本発明による方法は、電離層の断層モデルを用いるリアルタイム電離層補正を適用し、これに最低限の数の測地計算を組み合わせることにより、完全な瞬時曖昧さ決定を得ることを可能にする。この方法はさらに、基準局から100kmを超える距離において、1cm程度の精度を有するナビゲーションを可能にする。
本発明の好ましい応用は、異なる3つの周波数帯での搬送波送信を実施する、「GALLILEO」や「Modernized GPS」などの、将来の衛星ナビゲーションシステムにおいて実施されよう。
本発明による方法の主要な特徴によれば、10cm以内の精度を有する、この瞬時ナビゲーション機能は、電離層補正の適用を可能にするために、あまり複雑ではない「TCAR」タイプの三搬送波位相曖昧さ決定方法と、リアルタイム電離層モデルの決定とを組み合わせることによって成り立つ。
本明細書に記載の例示的な実験は、以下に示すように、等価な条件の下で先行技術の方法によって得られる結果からの著しい改善を示した。
・電離層モデルを生成しにくい状況(太陽極大期の正午)で、最寄りの地上固定基準局から100kmを超える距離において、ほぼ60%以下であった瞬時(「シングルエポック」)成功率がほぼ90%まで改善した。
・電離層補正において、この高い効率が、約5分の遅延時間で維持された。
・利用可能な衛星が4つに限られているにもかかわらず、データセットにおいて、例として継続される実験的条件に対し、対応するナビゲーションを、「シングルエポック」モードで瞬時に達成することができ、東成分、北成分、垂直成分がそれぞれ3cm、5cm、2cmである三次元「RMS」値を得ることが可能になった。
・好ましい実施形態において、単純な擬似距離マルチパス低減アプローチが方法に組み込まれていれば、リアルタイム曖昧さ完全性テストによって、性能を改善することができた。
・以下のように困難なケースでも性能が良好であることを実証した。
・低緯度(48度の代わりに35度)で、電離層の値がより高い場合。
・概して最高勾配が生成される、電離層の「北部赤道異常」の下の熱帯の局を基準とする極端な条件。後者のケースでは、ユーザが自身の電離層フィルタフィードを生成し、これを、基準ネットワークおよび自身の電離層観測からの補正と組み合わせる必要がある。
・最寄りの基準局から約140kmのところを飛行中の航空機が使用できる高精度の電離層補正を提供することを可能にした、高い力学。
ただし、本発明が、(特に図1〜8と併せて)明示的に記載された例示的実施形態だけに限定されないことを明確に理解されたい。
最後に、数値の例は、単に例として示したものであり、本発明の範囲に対していかなる種類の制限も与えるものではない。それらの数値の例は、当業者の能力の範囲内での単純な技術的選択から提供されたものである。
【0015】
【表1】
【0016】
【表2】
【0017】
【表3】
【0018】
【表4】
【0019】
【表5】
【0020】
【表6】
【図面の簡単な説明】
【0021】
【図1】Aは地球の部分断面、地球を取り巻く電離層の、ボクセルに区切られた部分断面、3つの通信衛星にある「GPS」送信機で生成される電波ビーム、およびそれらの信号を受信する3つの地上局を概略的に示した図である。 Bは移動体の「GPS」受信機から見た、本発明の方法を実現する完結したナビゲーションシステムの配置構成の概略図である。
【図2】同じ座標軸に対する地上基準局と移動体の基線および位置を概略的に表す図である。
【図3】図2を拡大して、同じ座標軸に対する移動体の軌跡を示した図である。
【図4】本発明によるリアルタイム電離層モデルから推定した遅延と実際の電離層遅延との比較の例を示すグラフである。
【図5】電離層の写実的なモデルを用いてリアルタイムで推定した「全電子数勾配(Slant Total Electron Content)」(「STEC」)の二重差と実際の値との比較の例を示すグラフである。
【図6】「STEC」の二重差の、リアルタイム電離層モデルによる決定における誤差と2つの電離層しきい値との比較の例を示すグラフである。
【図7】A〜Dは各ナビゲーション成分における推定誤差(単位:m)の例を示すグラフである。
【図8】A〜Dは同じナビゲーション成分における実際の誤差(単位:m)の例を示すグラフである。
【図9】遅延時間が1〜30秒の範囲である補正について、(「TECU」が0.26を超える)すべての曖昧さを決定するのに十分な大きさの電離層二重差の瞬時決定の成功率の例を示すグラフである。
【図10】遅延時間が900秒までの補正について、電離層二重差の瞬時決定の成功率の例を示すグラフである。
【技術分野】
【0001】
本発明は、衛星から送信される三搬送波電波信号と電離層補正とを用いるリアルタイムナビゲーションの方法およびシステムに関し、より詳細には、連続的に更新されるリアルタイム電離層モデルを用いて得られる補正に関する。このモデルは、たとえば三次元ボクセルモデルのように実装される、衛星ナビゲーションシステムからのデータに基づくモデルである。
本発明は、特に、後述するように、一般に数百kmあるいはそれ以上の程度の距離において10cm以内の精度を有する高精度の瞬時ナビゲーションの分野に適用可能である(ただし、その分野だけには限定されない)。
以下、例示を目的として、本発明の好ましい応用に焦点を当てるが、いかなる形でも本発明の範囲を限定するものではない。
【背景技術】
【0002】
静止しているか、移動している「物体」の正確な測位、および物体が移動している場合は、物体の位置、運動、運動方向、および/または運動速度に関するデータを得るために、現在一般的に用いられる手法の1つは、地球周回軌道にある人工衛星から送信される電波信号を用いる手法である。「物体」という用語は、車両、船舶、航空機をはじめとして、非常に広範な意味であると理解されたい。簡単のために、以下ではこの「物体」を「移動体」と称する。
前述の測位を得る手法としては、様々な手法が知られている。それらの手法は、宇宙にある複数の衛星(または衛星の集合体。これらの衛星は地上に対して静止していても静止していなくてもよい)の瞬時位置および電波の伝搬速度がわかっていることを特に前提としている。衛星には高精度クロックが搭載されており、送信される信号にはタイムスタンプ情報が含まれる。このタイムスタンプ情報から、送信および受信の正確な瞬間を知ることができる。したがって、ある瞬間において、移動体の視野内にある衛星と移動体との理論上の距離を、電波の伝搬速度と電波が移動体に到達する時間とから決定できる。十分な数の衛星が識別可能であれば、それらにより、基準フレームに対する移動体の座標を、二次元(地球の経度と緯度)あるいはさらに三次元(経度、緯度、および高度/垂直位置)で決定することができる。
ただし、後述するように、様々な要因によって測定誤差が蓄積されるために、計算される距離は概算値に過ぎず、移動体の位置の決定には、用いる技術に応じて、多かれ少なかれ、無視できない程度の不正確さが伴う。
最もよく知られる衛星ナビゲーションシステムの1つは、「GPS」(「Global Positioning System(全地球測位システム)」)と呼ばれるシステムである。
通常、「GPS」(または同様のシステムの)衛星は、一般にL1(搬送波周波数1.575GHz)およびL2(搬送波周波数1.227GHz)と呼ばれる2つの周波数帯で送信を行う。つまり、これらは、衛星に適用される従属的な「二周波数」である。
当業者にはよく知られている方法に従って、これら2つの周波数を用いることにより、基準フレームに対する移動体の位置を決定する精度を高めることができるが、そのためには、より複雑で、より高コストの「GPS」受信機が必要になる。
位置決定に用いられる方法は主に2つある。リアルタイムで決定する方法と、事後に決定する方法である。事後の決定は、いわゆる「後処理」を実行することによって行う。リアルタイムで決定する方法は、一般に「シングルエポック」決定(この用語は後で使う)、あるいは瞬時決定と呼ばれ、「エポック」の一回の観察の間に計算を行う。事後に決定する方法(「後処理」)は、精度を高めることができる。ただし、事後に決定する方法は、遅い移動体(たとえば、船舶)に対しては特に目立つ弱点がないが、非常に速い移動体(たとえば、航空機)には不適である。
衛星から送信される信号と、位置がよく知られている地上固定基準局からの信号とを結合することによって、精度をより高めることができる。ただし、移動体が長距離を移動する場合は、その固定基準局のネットワークを比較的密にする必要がある。特に、移動体の位置決定に高い精度が求められる場合にはそのようにしなければならず、それに応じてシステム全体のコストも上がる。
さらに、様々な誤差要因のうち、考慮する距離が数十km以上になる場合には、搬送波位相曖昧さの瞬時決定能力に影響を及ぼし、したがって、前述の「GPS」システムなどの二周波数全地球ナビゲーション衛星システムによる、1cmのレベルの精度でナビゲーションを実現する能力に影響を及ぼす主要な問題の1つが、電離層屈折差である。この特性は、「GALILEO」システムや「Modernized GPS」システムのような、今後出てくる三周波数システムについても依然あてはまる。
現在計画されている三搬送波システムは、本質的に、最低限の数の測地計算で、瞬時曖昧さ決定における成功率および完全性が高いという潜在的優位性をもたらす。これは特に、より多くの様々なデータ(すなわち、前述の三周波数に関連するデータ)が利用可能になり、それに伴って、瞬時(「シングルエポック」)曖昧さ決定を行える可能性が高まることによる。
しかし、やはり、この決定は、後述する電離層屈折の影響を深刻に受ける可能性がある。
移動体(特に長距離を移動する移動体)の位置の瞬時決定の精度を高めるためには、特に電離層屈折の有害な影響を減らすことを可能にする手法を実装することが依然として必要である。
先行技術においては、この必要を満たす様々な方法が提案されてきた。
たとえば、「TCAR」(三搬送波曖昧さ決定)と呼ばれる方法がある。この方法は、U.VOLLATHらの論文「ANALYSIS OF THREE−CARRIER AMBIGUITY RESOLUTION(TCAR)TECHNIQUE FOR PRECISE RELATIVE POSITIONING IN GNSS−2」(発表:「Proceedings of the ION GPS」、1998年、IX−O−13、1〜6頁)で説明されている。
また、「CIR」(カスケード整数決定)と呼ばれる方法もある。この方法は、Jaewo JUNGらの論文「Optimization of Cascade Integer Resolution with Three Civil GPS Frequencies」(発表:「Proceedings of the ION GPS 2000」)で説明されている。
これら2つの方法は、基本的なアプローチがほぼ同じである。すなわち、電波の周波数ビートを計算することにより、整数の二重差曖昧さを連続的に決定する。この計算は最長ビート波長から最短ビート波長にかけて実行され、これには、いわゆる「ワイド」レーン搬送波位相と「エクストラワイド」レーン搬送波位相(それぞれ波長が7.480mと0.862m)の組み合わせと、「L1周波数」(波長0.190m)における第1の搬送波が含まれる。
「TCAR」法は、特に、曖昧さの完全な組を(「シングルエポック」モードで)瞬時に解決することを試みるシンプルなアプローチを構成する。ただし、「TCAR」の性能は、距離に応じて発生する、電離層屈折による干渉性の低下の影響を強く受ける。実際、後述するように、(二周波数システムの場合と同様に)電離層遅延の二重差の値が0.26TECU(L1の場合は4cmの遅延に対応)を超えると、電離層遅延が問題になる。
「TECU」は、電離層の特定の電気的特性を記述する際に用いられる単位である。本質的に、電離層は、電子の総数すなわち「TEC」(「Total Electron Content(全電子数)」を表すマップを用いて記述できる。このマップは、垂直方向の電子数の積分を緯度および経度の関数として表したものである。TECの単位は「TECU」(「TEC Unit(TEC単位)」)である。1TECUは、観測されている衛星の観測線に沿う円筒(断面積1m2)に1016個の電子が含まれることを表す。電離層中の荷電粒子は太陽によって生成される。その輻射強度は、当該時刻の関数として自然に変化する。地球が電離層の下で自転しているので、「TEC」マップは、太陽に対して固定されている基準フレームを表すものと一般に考えられているが、時間の関数として変化する。
「GPS」データから計算された垂直方向の遅延の電離層(「TEC」)マップを調べることによってわかるように、前述のしきい値は簡単に超えられる。そのようなマップは、たとえば、「ジェット推進研究所(Jet Propulsion Laboratory)」、ベルン大学(the University of Bern)、その他で作成され、「米国大気研究大学機構(University Corporation for Atmospheric Research)」や他の同様の組織によってインターネット上で公開されている。
そこで、「TCAR」法をさらに改良するために、「ITCAR」(「Integrated TCAR」)と呼ばれる統合型の手法が開発された。この手法は、たとえば、前述のVOLLATHらの論文で説明されている。
この手法は、検索アルゴリズムおよびナビゲーションフィルタを用い、曖昧さが出力信号の一部であり、残留電離層誤差を大まかに推定する。これらの手法の詳細については、その論文を参照されたい。
ただし、「ITCAR」手法は大幅な改善ではあるものの、電離層屈折の二重差を認識しないことによる影響に関しては変わりがなく、それによって、数十kmを超える距離における曖昧さ決定の成功率が制限される。これについては、VOLLATHらの論文「Ambiguity Resolution Using Three Carriers−Performance Analyzing Using 'Real' Data」(発表:「GNSS Symposium」、Seville、2001年5月)で説明されている。
さらに、基準フレームに対する移動体の位置の決定精度を高める目的で、固定局のネットワークによって生成される「二周波数」データから得られる、電離層のリアルタイム電離層モデルを、測地プログラムからのデータと結合し、そのようなデータを用いて電離層補正を実行することも提案されている。この方法は、「GPS」タイプの二周波数システムにおけるリアルタイムの曖昧さ決定ではある程度成功している。
このタイプの方法の1つである、「WARTK」(「Wide Area Real−Time Kinematics」)と呼ばれる方法が、たとえば、Hernandez−Pajaresらの論文「Tomographic Modeling of GNSS Ionospheric Corrections:Assessment and Real−Time Applications」(発表:「ION GPS」、2000年9月19〜22日、616〜625頁)で説明されている。この方法は、確かに、電離層中を伝搬する電波が受ける擾乱の有害な影響を弱めることを可能にし、したがって、位相曖昧さ決定および基準フレームに対する移動体の位置決定の成功率を大幅に高めることを可能にする。ただし、この方法は、前述のモデルをリアルタイムで生成すること、および距離計測に適用する電離層補正をこれもリアルタイムで決定することのために、大量の計算を必要とする。
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、(前述のものを含む)先行技術の方法およびシステムの弱点を克服しようとするものである。
【課題を解決するための手段】
【0004】
本発明の目的は、衛星から送信される三搬送波電波信号と、輻射電波が通り抜ける領域を示す電離層モデルのデータと測地データとを結合して得られる電離層補正とを用いて、高精度リアルタイムナビゲーション(代表値で10cmより高い精度の、移動体の位置決定)の方法を提供することである。
この目的のために、本発明の第1の重要な特徴にしたがって、衛星から送信される三搬送波の位相の曖昧さを瞬時に(「シングルエポック」で)決定する、前述の「TCAR」タイプのシンプルな方法を用いる。高精度のリアルタイム電離層補正が、写実的な電離層モデルに基づいて、固定基準局によって生成される。これらの電離層補正が、それらを「TCAR」に取り込むユーザに送信される。
本発明には、重要な利点が3つある。
本発明に固有の機能により、最寄りの基準局から非常に遠い位置においては、長距離に対する「ITCAR」法の性能より良好な性能が得られる。本発明による方法では、一般に、最寄りの局から100kmを超える距離において90%を超える曖昧さを瞬時決定することが可能であり、60km程度の距離であれば、あまり好ましくない運用条件(電離層の値が低く、太陽光線が最大である条件)の下でもほぼ100%の決定が可能である。同等な条件の下での、三周波数を用いる先行技術の方法で達成できる成功率は、代表値で60%程度に過ぎない。
この後者の特徴が非常に有利であることは簡単に理解できよう。本発明による方法では、地上固定基準局の非常に密なネットワーク(100km程度離れている局の群)を設置する必要がないからである。その結果、全体として大幅な節約が可能になる。たとえば、ヨーロッパの例では、その大陸をカバーするための基準局の数を、先行技術の方法で得られる移動体の位置決定の精度と同等の精度を維持しながら、基準局の間隔が数十km程度しかないネットワークに比べて99%減らすことが可能である。実際、これだけの設置密度があれば、好ましい用途において本発明の方法が目的としている、10cm以内のナビゲーション精度を得ることができる。さらに、本発明の方法に必要な、地上固定基準局のネットワークは、「EGNOS GNSS」(「European Geostationary Navigation Overlay System−Global Navigation Satellite Systems」)として知られる欧州衛星ナビゲーションシステムで現在設置されているネットワークと非常によく似ている。このシステムは、「IMMERSAT III」衛星の配置に基づいている。このことは、既存の施設または設置作業中の施設と実質的な互換性があることを意味する。
それでもなお、本発明による方法は、「TCAR」法と同様に、きわめてシンプルである。具体的には、本発明による方法は、ユーザ(移動体の受信機)側で必要な計算量が、前述の、二周波数測位システムのために開発された「ITCAR」法および「WARTK」法と比べて少ない。
さらに、観測される衛星から送信される輻射電波が通り抜ける領域の写実的なリアルタイム電離層モデルは、搬送波の位相データだけを用いる。このデータは、「マスタ局」と呼ばれる、基準局ネットワークにおける単一の中心(局の1つをあてることができる)で計算された測地推定値と結合される。
したがって、本発明の主対象は、異なる第1、第2、および第3の周波数の三搬送波電波信号を用いてユーザ(移動体と称する)の位置を決定するリアルタイムナビゲーション方法である。周波数の値は前記第1から前記第3にかけて大きくなる。前記電波信号は、地球周回軌道にあって、前記移動体の視野内にある衛星に搭載された、所与の数の送信機から送信される。前記電波信号は、前記移動体に関連付けられた受信機と、基準局と呼ばれる複数の地上固定局の中の少なくとも1つの地上局に関連付けられた受信機とによって受信される。前記電波信号は、前記地球を取り巻く大気のいわゆる電離層を通り抜け、前記搬送波に位相曖昧さを発生させる擾乱を受ける。本方法は、少なくとも以下のステップを含むことで特徴付けられる。
・第1のステップでは、単一コード値を用いる擬似距離の組み合わせから、前記移動体における、前記第3および第2の搬送波の位相差の、いわゆる「エクストラワイドレーン」曖昧さを決定する。
・第2のステップでは、前記第1のステップで決定した前記「エクストラワイドレーン」曖昧さから、前記移動体における、前記第1および第2の搬送波の位相差の、いわゆる「ワイドレーン」曖昧さを推定する。
・第3のステップでは、前記第2のステップで推定した前記「ワイドレーン」曖昧さから、前記移動体における、前記周波数のうちの1つの曖昧さを決定する。
さらに、前記第3のステップにおいてリアルタイム電離層補正を適用するステップが含まれる。前記電離層補正は、連続的に更新される、前記電離層のリアルタイム電離層モデルに基づく。
本発明の別の目的は、この方法を実現する衛星ナビゲーションシステムである。
以下、添付図面を参照しながら、本発明について詳細に説明する。
【発明を実施するための最良の形態】
【0005】
以下では、いかなる形でも本発明の範囲を限定することなく、特に指定しない限り、本発明の好ましい応用の状況、すなわち、衛星から送信される、周波数の異なる三搬送波電波を用いる高精度衛星ナビゲーション方法と、衛星からの電波周波数輻射によってサウンディングされる領域の写実的なリアルタイム電離層モデルから導出されるリアルタイム補正のケースに焦点を当てる。
以下、本発明による方法の主要ステップを詳細に説明する。説明には、代表的な数値を用いる。主要なステップは、3つの基本ステップからなる。これらは前述の「TCAR」法のステップとよく似ている。それらのステップについて説明する。
ステップ1:
いわゆる「エクストラワイドレーン」曖昧さ(ある例示的実験のデータセットでは波長の代表値が7.5m)を決定するために、「擬似距離」と呼ばれるコードの組み合わせを追加する。
誤差要因として知られているものには、いわゆる「マルチパス」現象が含まれる。擬似距離マルチパスは成功率を下げる可能性があるが、この誤差は、概して、「エクストラワイドレーン」の長波長に比べれば振幅が小さく、通常はこの問題を克服することができる。
実際、「TCAR」方式の典型である第1のステップ(たとえば、前述のVOLLATHらの、1998年からの論文を参照)は、位相の組み合わせと同じ電離層依存性の値および符号を共用する「擬似距離」(コード)の組み合わせPewを用いて、「エクストラワイド」レーン搬送波位相の二重差(以下、∇ΔLewと称する)(Lewは「エクストラワイド」レーン搬送波の波長)から、(衛星−受信機ペアの間の)曖昧さの二重差(以下、∇ΔNewと称する)を推定する。「エクストラワイドレーン」の組み合わせから長波長が得られる可能性がある。LewおよびPewの値は、次式によって決定できる。
【0006】
【数1】
ただし、Lxは、周波数がfx、波長がλxの場合の搬送波位相の測定値(長さ単位)である。本明細書の末尾に添付した表1に、Xの値を示した。数字の1〜3は、記載の例の3つの周波数に関連付けられていることを理解されたい。表1は、特定量の関連データ(周波数、波長、電離層依存性、および最大マルチパス誤差)、および本発明による方法の理解に役立つ様々な測定値をまとめたものである。このデータは、3つの周波数帯L1〜L3と、「エクストラワイド」および「ワイド」レーン搬送波位相のLewおよびLwとに、それぞれ関連付けられている。Pxは、対応する「擬似距離」の測定値である。搬送波位相と「擬似距離」のマルチパス誤差および測定誤差は、それぞれ、mx、Mx、εx、およびExとマーキングされている(表1には、最大マルチパス値と代表的な測定誤差もリストされている)。差分されていない搬送波位相曖昧さλxbxは、機器の遅延を含み、二重差分後に、波長λx∇ΔNxの整数倍の値になる。電離層遅延αxIは、衛星から放射されるビームに沿って自由電子密度を前述のように垂直方向にTECU単位で測定したものの積分である「全電子数勾配(Slant Total Electron Content)」(「STEC」)に比例する。式(1)および(2)で、ρ*は、周波数に依存しない項(距離、クロック誤差、対流圏屈折など)を表す。
式(2)には、搬送波位相ワインドアップなどの付加的な小さな項が明示的に表されていないが、次式で表されるように、対応するコードを減算することによって、式(2)から、単一の観測「エポック」における「エクストラワイド」レーン曖昧さ(以下、
【0007】
【数2】
と称する)の二重差を推定することが可能である。
【0008】
【数3】
受信機に影響を与える実質的なマルチパス(通常は3.7m未満)がない場合、そのような評価の誤差限界は、(表1で与えられた値が示すように)0.5サイクル未満であり、それによって、曖昧さをちょうど整数値に瞬時決定することが可能になる。
ステップ2:
第1のステップにおいて得られた、曖昧さがない「エクストラワイドレーン」搬送波位相から、組み合わせの「ワイドレーン」曖昧さを推定する。ほとんどの時間帯において、これら2つの間の差は、「エクストラワイドレーン」曖昧さと、電離層屈折差(記載の例の動作周波数の場合で約0.06サイクル/TECU)とによって構成される。非分散項は除去される。ここでの主な問題は、測定誤差と、搬送波位相信号のマルチパスである。中緯度における、100km未満の基線による電離層屈折差の代表値はほんの数TECUであるが、電離層補正を行うことにより、より長距離で、より困難な電離層状況であっても成功率を大幅に高めることができる。
以下、このステップの主要な詳細を説明する。
第1の「長波長」曖昧さ∇ΔNewが、対応する「擬似距離」を用いて決定されれば、次式
【0009】
【数4】
(ただし、φ1とφ2は周波数がそれぞれL1とL2の場合の位相)で表される「ワイドレーン」の組み合わせLwなどの第2の曖昧さは、∇ΔNewと、搬送波位相の対応する差(表1の対応する定数値を参照)とから、次式にしたがって推定できる。
【0010】
【数5】
本質的には、中程度のマルチパスがあれば、式(5)に対応する誤差項(測定誤差も含む)は、通常、0.3m未満、すなわち、0.4サイクル未満である。曖昧さ決定後に残る誤差項は、例(表1を参照)の周波数の場合、0.0580サイクル/TECUの値における電離層屈折に対応する。この項によって成功率が低下する可能性があるが、「STEC」値の二重差(以下、∇ΔIと称する)が概して10TECU未満である、中緯度で、数百km未満の距離であれば、クリティカルな項ではない。後で図5を参照して、詳細な例を示す。
このような状況であれば、リアルタイム電離層モデルを用いることによって、低緯度における、基線が長い状況での「エクストラワイドレーン」曖昧さ決定の成功の条件が改善される。
ステップ3:
L1と、前に得られた、曖昧さがない「エクストラワイドレーン」との差から、L1位相曖昧さを導出する。このステップでの主な問題は、対応する電離層屈折差(約1.9サイクル/TECU)である。これにより、中緯度で何サイクルもの誤差が発生する可能性がある。
この第3のステップでは、第2のステップとよく似た手順を実施するが、用いるのは、中波長と長波長の搬送波位相差ではなく、短波長と中波長の搬送波位相差である。このことは、次式(6)から明らかである。
【0011】
【数6】
ただし、α1およびαw(大まかにαx)は、記載の例における、表1で定義された電離層係数である。
第3のステップでは、搬送波位相の測定誤差と、中程度のマルチパスとの組み合わせによって新たに誤差(代表値で0.2サイクル未満)が発生する(表1を参照)。ただし、ここでのクリティカルな問題は、短い基線の場合に0.5サイクル(−1.945サイクル/TECU)を超える誤差を発生させることもある電離層屈折差である。
この基本的な制限は、正確な整数曖昧さ評価を確実に行えるように、0.26TECU(すなわち、0.5サイクル×TECU/1.9475)より良好なリアルタイム電離層補正を計算することによって克服できる。これらの補正は、次に説明するステップ4で行う。
ステップ4:
第3のステップで発生する問題を克服するために(つまり、最短波長の曖昧さを決定するために)、電離層屈折差を推定できるリアルタイムモデルを決定する。このモデルは、基準局のネットワーク内の固定の位置における二周波数搬送波位相データから計算される。これによって、衛星から送信される輻射電波が通り抜ける電離層領域の描写が行われると考えてよい。このモデルのデータは、同時に行われる測地計算から導出されるデータと、周知の方法で結合される。その測地計算は、有利なことに、「マスタ」局と呼ばれる、ネットワーク内の地上固定局の1つで実行できる。この手法の主な利点は、変動する電離層条件の下で、最寄りの基準局から何百キロも離れていても、0.25TECU未満の誤差(代表値)で屈折差を推定できることである。この精度であれば、中長距離のL1曖昧さの瞬時決定での誤差は0.5サイクル未満(代表値)である。
自由電子の電離層分布は、分解能体積単位のグリッド(「ボクセル」)によって大まかに決定できる。ボクセル内では、任意の時点での「地球中心を基準にした慣性座標系(Earth Centered Inertial(ECI)system)」内の電子密度が一定であると想定される。
このタイプの典型的な配置を図1Aに示す。この図1Aは、子午線断面のボクセルVoxijkの概略図である(i、j、kは、それぞれ、経度、緯度、高度の座標の添え字である)。この図では、リアルタイム電離層モデルのデータを決定するために、電離層電子密度分布を式(7)にしたがって細分化している。
この図1Aでは、地球GTは、部分断面で示され、電離層CIONで囲まれている。CIONは、2つの中間層Ci1およびCi2に任意に細分化されている。記載の例におけるCi1層の低い高度は60kmであり、高い高度は740kmである。Ci2層の低い高度は740kmであり、高い高度は1420kmである。各ボクセルVoxijkの面角度は、5×2度である。
例示目的で、衛星をSAT1〜SATnで表現し、そのうちの3つを図示した。各衛星は、「GPS」送信機GPSE1〜GPSEnをそれぞれ搭載している。これらの衛星SAT1〜SATnは、すべてまたは一部の地上局(たとえば、図1Aに示した3つの固定基準局ST1〜STM)の視野内にある。各地上局には、「GPS」受信機GPSR1〜GPSRnと、組み込まれた計算手段(図示せず)が含まれる。
図1Bは、移動体SURから見える、本発明によるナビゲーションシステム全体の配置構成を概略的に表している。
このシステムは、EGNOSやWAASのような現在配備されているいくつかのシステムの場合と同様のコンピュータ、インターフェース、および物理リソースを必要とする。
この、本発明による方法を実現するシステムは、衛星(たとえば、図1Aの衛星SAT1〜SATn)から送信される信号を受信する「GPS」受信機SURGPSを含む。これらの三周波数帯信号から、組み込まれた計算手段(図示せず)を用いて前述の「TCAR」法の3つのステップが実行される。
SURGPSはさらに、「GPS」受信機REFGPSを用いて衛星SAT1−GPSE1〜SATn−GPSEnから受信した信号から、基準局REF(図1Aの地上固定基準局のネットワークST1〜STMのうちの最寄りの局)によって決定されたリアルタイム電離層モデルからデータ信号を受信する。局REFは、送信機REFE1を用いて、リアルタイム電離層モデルからのデータを移動体SURに送信する。
測地構成データは、単一のいわゆるマスタ局REFMで決定でき、REFMの送信機REFMEで送信され、移動体SURに配信されて、電離層モデルからのデータと結合される。一般に、この局は、他の地上固定基準局と同様に、「GPS」受信機REFMGPSも有する。測地構成データは、測地モデルのデータと同時に計算される。
よく知られた方法では、電離層の決定は、ランダムな伝搬プロセスのように扱われ、代表値で109〜1010個/m3/
【0012】
【数7】
の電子のプロセスノイズを有する、照明されている各セルi、j、およびk(i、j、kは、既に定義されているように、三次元座標の添え字)の平均電子密度Neを、カルマンフィルタを用いてリアルタイムで決定することにより得られる。限定でない例として、カルマンフィルタを用いるプロセスについては、G.J.BIERMANの著書「Factorization Methods for Discrete Sequential Estimation」(発表:Mathematics in Science and Engineering、Vol.128、Academic Press、New York、1977年)で説明されている。
本発明の方法の重要な特徴によれば、搬送波位相データのみを用いる。したがって、「擬似距離」コードノイズおよびマルチパスは回避される。搬送波位相偏波B1(衛星−受信機ペアごとに搬送波位相データの各連続弧において一定)は、(サイクルスリップ発生時にランダムホワイトノイズプロセスになる)ランダム変数として、同時に推定される。この偏波は、フィルタにおいて、電子密度値との干渉性がリアルタイムで低下する。これは、下の式(7)に示すように、衛星の幾何学的配置が変化し、2種類の未知物のばらつきが小さくなるからである。式(7)は、「GNSS」の衛星−受信機ペアの間に与えられる電離層情報のモデルを表しており、L1およびL2は、長さの単位で表された搬送波位相であり、Li=L1−L2であり、Neは電子密度である。L1は次式で与えられる。
【0013】
【数8】
ただし、値「REC」と「SAT」は、それぞれ「衛星−受信機」ペアのGPS受信機と衛星に関連し、dlは、このペアを結ぶ視線上の基本距離であり、Δsi,j,kは、STECの基本座標面であり、i、j、およびkは、既に定義されているように、三次元座標の添え字である。
この方法は特に、電子密度分布の局所的な特徴を検出する場合に好適であり、通常の方法の場合のように1つの層を用いる代わりに、2つの層を、Global Navigation Satellite System(「GNSS」)からの地上データとともに用いることにより、電子数のモデリングが良好にならないリスクが大幅に減る。
「WADGNSS」(「Wide Area Differential GNSS」)ネットワークの場合は、これらの、式(7)より得られる全電子数勾配(「STEC」)のリアルタイム補正の内容から、
・第1に、局と衛星の二重差∇ΔSTECを、1TECU未満の誤差で形成することと、基準局における第2の(すなわち、「ワイドレーン」)曖昧さを得ることとが可能であり、
・第2に、移動体の受信機において、曖昧さがない値L1、すなわち、∇ΔSTECの非常に精度の高い値を、1TECUの数百分の1のレベルで補間することが可能である。これは、曖昧さの決定後に得られる値に相当する。
この補間された値が0.26TECUより良好であれば、移動体の受信機は、両方の曖昧さをリアルタイムで決定できる。
この方法は、本質的に、Hernandez−Pajaresらの前述の論文(2000年)で発表された、いわゆる「WARTK」法によく似ている。様々な実験を通して、これまで「WARTK」法で得られた成果が、Hernandez−Pajaresらの別の論文「Tomographic Modeling of GNSS Ionospheric Corrections:Assessment and Real−Time Applications」(発表:「ION GPS 2001」、2001年9月)でまとめられている。この方法のより詳細な説明については、これら2件の論文を参照されたい。
この方法を運動学的に利用する場合、最も重大な制限の1つが、電離層擾乱の伝搬すなわち「TID」(「Traveling Ionospheric Disturbances」)などの局地的な不規則性の存在である。これらによって、ネットワーク内の基準局間で電離層補正を線形補間したときの結果が不正確になる可能性がある。移動体からの二周波数データを取り込むことによって性能を改善できる。
さらに、基準局における計算の場合は、距離が長いことと、電子数勾配が急であることも、この方法の性能を制限する可能性がある。そこで、本発明の方法の特徴にしたがって、何千kmも隔てられた固定および/または基準局の場合を含めるために追加手続きが開発された。この手続きは、いわゆる平滑化「ワイドレーン」コードを用いて、電離層モデルを改良し、その結果として、リアルタイム曖昧さ決定を支援するものである。そのような手続きについては、たとえば、Hernandez−Pajaresらの論文「Improving the Real−Time Ionospheric Determination from GPS Sites at Very Long Distances Over the Equator」(発表:Journal of Geophysical Research、2002年)で説明されている。
ただし、移動体の受信機で二周波数「GPS」システムを用いて曖昧さをリアルタイムで決定するために先行技術で用いられている方法は、20cm前後のレベルの比較的良好な位置決定を保証し、自由浮遊電離層偏波結合を決定し、それによって、数分程度の収束時間を経て(前述の「WARTK」法を用いて)曖昧さをリアルタイムで決定できるようにするために、多数の測地計算を必要とする。
本発明は、(特に「WARTK」法に見られる)先行技術の不十分な点を克服することを可能にする。本発明は、(数十〜数百km離れた)基準局間の中長距離での三搬送波位相曖昧さを、最低限の数の測地計算により、決定する瞬時の方法を改良することを可能にする。主な改良は、基準局において連続的に計算される電離層モデルによって供給されるリアルタイム電離層補正を用いる、前述の「TCAR」法の第3のステップに対するものである。
本発明の方法では、前述のステップの一層の改良をさらに実現する。この改良は、1つのコード要素の代わりに、異なる3つの擬似距離コード(以下、P1、P2、P3と称する)を用いることにあり、これによって、「エクストラワイドレーン」曖昧さ決定におけるマルチパス効果の低減が可能になる。
さらに、好ましい実施形態では、最長波長の曖昧さ決定において、擬似距離、「ワイドレーン」、およびL1周波数帯のコードを用いて完全性テストを実行して、誤差に関連する曖昧さ評価のジャンプを検出する。本質的には、前述の第2および第3のステップにおいて、式(5)および(6)から明らかなように、「エクストラワイドレーン」曖昧さ誤差の1サイクルからほぼ8サイクルの「ワイドレーン」誤差が発生し、1サイクルの「ワイドレーン」誤差は、ほぼ4サイクルのL1誤差に変換される。L1は、記載の例における最短波長の搬送波である。多くの場合、これらの曖昧さ評価のジャンプは、検出されるだけの大きさであり、対応するコードを用いてフィルタリングされる。
この、本発明による方法により、誤差が代表値で数cm未満であるナビゲーションが(100kmを超える)長距離では不能になる主な制限を直接克服することが可能になる。
本明細書の末尾に添付した表2は、リアルタイム曖昧さ決定のメインの方法の特徴を、先行技術(「TCAR」、「ITCAR」、「WARTK」)の場合と本発明による場合とで比較し、それをまとめたものである。
ここで、本発明による方法の主要な特徴をわかりやすく示すために、前述の「GNSS」タイプの既存システムにおいて、衛星に搭載されている修正された信号発生器から供給される様々なデータセットに基づいて実施した例示的実験(航空機、「陸上」を移動するユーザ(たとえば、陸上車)、または固定局のシミュレーションを含む)について説明する。実験にあたっては、様々な動的条件および電離層条件を考慮した。
例示のため、かつ、意味のある例を提供するために、陸上車の受信機(以下、移動体SURと称する)の曖昧さのリアルタイム決定について、移動体SURから約129km離れた固定基準局(以下ではREFと称する)を基準として様々な条件から詳細に検討した。記載の例では、1Hzで20分間視野内にある4つの衛星について、「GNSS」システムのシミュレータに採用する3つの周波数を、2つの「GPS」搬送波(それぞれ1575.42MHzと1227.60MHz)と「GLONASS」システムの24チャネル搬送波(1615.50MHz)とで構成し、「AGGA」(「Advanced GPS/GLONASS ASIC」)として知られるタイプの妥当性検査済み受信機の12個の利用可能チャネルを用いた。「AGGA」は、「DNSS」システム信号の電波掩蔽や低地球軌道の決定などの宇宙応用のための高速デジタル信号処理を可能にするデジタル集積回路である。この回路は、「ASIC」(「特定用途向け集積回路」)規格に基づいている(記載の例では、ATMEL T7905E素子)。「GLONASS」(「Global Orbiting Navigation Satellite System」)は、「GPS」システムと同等の、ロシアの衛星ナビゲーションシステムである。
記載の例では、2つの基本データセットについて検討した。1つは、信号電力が最大でマルチパスがない、理想的なケースを構成するセット(以下、「P5−M0」と称する)であり、もう1つは、電力が平均で、マルチパスがあるケースを構成するセット(以下、「P3−M1」と称する)である。
それらのデータセットにおいてシミュレートされている基準局受信機に加えて、「IGS」(「International GPS Service」)ネットワーク内に、200kmを超える距離で存在しているさらに3つの局を、電離層の計算だけのために追加した。これによって、より大きな固定局ネットワークを含む、よりリアルな状況をエミュレートできるようになった。
以下では、最も困難なケース、すなわち、「移動体SUR−局REF」ペアが最長基線(約129km)であるケースについて詳細に検討した結果を示す。基準局REFは、図1Aの局ST1〜STMのうちの1つである。
図2はこの例を示し、基線と、座標軸に対する局REFおよび移動体SURの位置を表している。座標軸は、楕円体緯度と経度とを度で区切ったものである。
図3は、図2を拡大(ズーム)したもので、図2と同様の、楕円体緯度と経度とを度で区切った座標軸に対して、移動体SURの軌跡を示している。
この結果の第1の態様は、電離層フィルタのリアルタイム性能として参照される。図4に、リアルタイム電離層モデルから推定された遅延の例(グラフではTm)を、実際の電離層遅延(グラフではVv)との比較で示した。これらの値は、本発明による方法の機能を示すために実施した実験での測定値に対応する。
さらに、高精度ナビゲーションのためのより重要なパラメータである、移動体SURについての「STEC」(
【0014】
【数9】
)の推定二重差の値と、それらの真値(∇ΔI)との差(すなわち誤差)を図5および6に示した(縦軸の単位はTECUであり、横軸は秒単位で表した遅延である)。
より厳密には、図5は、最も遠く(約129kmの距離)にある受信機(REF)を基準として、本発明の重要な態様の1つによる電離層モデルを用いてリアルタイムで推定した「STEC」の二重差(グラフでは「ddSTEC」)を、移動体SURの受信機における真値との比較で示したものである。
図6は、「STEC」の二重差(グラフでは「ddSTEC」)の、リアルタイム電離層モデルによる決定の誤差を示したものである。電離層モデルの実際の値を、2つの電離層しきい値「Threshold1」(+0.26TECU)および「Threshold2」(−0.26TECU)と比較しており、これによって、第3の曖昧さを決定できる。
誤差がしきい値制限の±0.26TECUに収まる電離層決定は、全体の92%を超えている。したがって、これらは、マルチパスがない場合に3つの曖昧さを決定すること、および測定誤差を考慮しなくてよいことが可能であるための十分な精度を有する。誤差が0.26TECUを超えた、評価の残り8%のほとんどは、低高度かつ南方向で観測された衛星からのものであり、この方向では電離層の勾配が最も急になる。これらの結果は、4つの基準局に対して、南方向についての電離層補正計算を行う第5の局を追加することによって、わずかに改善された。
リアルタイム電離層補正が計算され、基準ネットワークから送信された時点で、ビームごとに3つの曖昧さを推定および同時に(「シングルエポック」モードで)決定するために、本発明による方法の手順を、移動体SURにおいて、記載の方法で実行することができる。
本明細書の末尾に添付した表3と表4に、それぞれ前述のデータセット「P5−M0」と「P3−M1」についての、曖昧さ決定の主な結果をまとめた。「TCAR」法の3つのステップの成功率を、以下の3つのケースについて示した。
(a)電離層補正を行わない場合。
(b)現在の「GPS」システムから送信された、Klobuchar電離層補正モデルによる、対応する電離層補正を行う場合。
(c)本発明の方法による、リアルタイム電離層モデルによる補正を行う場合。
より厳密には、表3に示した例の成功率(%)は、最も遠く(約129kmの距離)にある固定局REFを基準とし、前述の理想的なデータセットP5−M0(受信電力が最大で、マルチパスはなし)を用いた場合の、移動体SURの受信機についての、「エクストラワイドレーン」、「ワイドレーン」、およびL1周波数帯の曖昧さ(それぞれ、∇ΔNew、∇ΔNw、および∇ΔN1)の全3834回のオンザフライ決定テストでの成功率である。
表4は、表3とよく似ており、前述のデータセットP3−M1(受信電力が平均レベルで、マルチパスがある)を用いた場合である。括弧内の数は、全観測数に対する成功率である。
表3および4から明らかであるように、「TCAR」法の3つのステップに、高精度リアルタイム電離層モデルを適用するステップを組み合わせた本発明の方法を用いると、理想的なケース(データセット「P5−M0」:0〜92%)だけでなく、マルチパスがある、より困難なケース(データセット「P3−M1」)においても、瞬時(「シングルエポック」)曖昧さ決定の成功率をかなり上げることができる(∇ΔN1の場合、「Klobucharモデル」型の補正を行っても成功率は35%であるのに対し、本発明の方法にしたがって生成された電離層モデルによる補正を行うと、成功率は92%に達する)。
表4によれば、マルチパスの影響を受けるデータセット「P3−M1」に関する重大な問題の1つは、「TCAR」法による曖昧さ評価(∇Δewおよび∇Δw)の完全性が不足していることである(それぞれ、10%および4%不正確な瞬時決定である)。
この完全性を上げるために、すなわち、搬送波位相が存在するこのケースでは、不正確な曖昧さを織り込む可能性を減らすために、およびマルチパスごとにコード化するために、対応する擬似距離、「ワイドレーン」、およびL1のコードを用いて、「TCAR」法における、前の最長波長の曖昧さ(それぞれ、「エクストラワイドレーン」曖昧さと「ワイドレーン」曖昧さ)に含まれる潜在的な曖昧さ決定誤差を検出するよう試みることが可能である。誤差は、式(5)および(6)に示すように、「エクストラワイドレーン」と「ワイドレーン」のそれぞれにおいて、9波長倍および4波長倍に増幅される。
対応する結果を、本明細書の末尾に添付した表5と表6にまとめた。それぞれ、当該の重大な誤差をフィルタリングするために、擬似距離と、平滑化した擬似距離とを用いている。
表5は表2と似ているが、表5では、曖昧さ決定の成功率を計算する前に、完全性テスト(すなわち、擬似距離から導出された曖昧さとの比較)を受けさせている。これは、「ワイドレーン」およびL1曖昧さにおける大きなジャンプをフィルタリングするためであり、これらのジャンプは、その前の、より大きな波長曖昧さ誤差によるものである。最後の列は、利用可能度を示す。これは、3834回の観測のうちの、擬似距離を用いた事前の完全性テストに合格した割合(%)である。「*」がある、括弧内の数は、完全性テストに合格した後に計算された曖昧さの割合(%)である。前と同様に、括弧内の数は、全観測数に対する成功率である。
表6は、表3と似ているが、完全性テストを実施するために、「単純な」擬似距離の代わりに、平滑化された擬似距離を用いている。
表から明らかであるように、本発明の方法は、平滑化されたコードによる完全性テストを行うことにより、完全性を(表4の79%から表6の91%へと)約20%も改善することができ、利用可能度の低下は(100%から84%へと)比較的小さい(16%)。瞬時(「シングルエポック」)コードを代わりに用いた場合は、完全性がさらに改善され(84%)、利用可能度も上がる(90%)。本発明の方法によるリアルタイム電離層モデルによる補正の代わりにKlobuchar型の周知の「GPS」送信モデルを用いると、結果は大幅に悪化し、利用可能度もほとんどなくなる。
記載した実験に利用可能だったデータセットは、それらが瞬時曖昧さ決定を得るために好適であったという事実にもかかわらず、瞬時(「シングルエポック」)位置の決定においては、非常に制限のあるものであった。実際、実験においては、20分のデータのために視野内で利用可能な衛星が4つしかないため、移動体SURの瞬時ナビゲーション解は、マルチパスのないデータセット(「P5−M0」)で計算しなければならなかった。そして、最低限の4つの衛星を用いてナビゲーションを行うための信号対雑音比は非常に高いものでなければならなかった。さらに、少なくとも第5の衛星が必要であった、対流圏遅延の評価を省略した。さらに、特定の搬送波位相カットオフ構成を基準とする測位決定において、第1の間隔(約7200〜7500秒)をスキップした。これは、この期間に受信機内において測定上の問題が発生する可能性があったからである。一方、電離層補正およびこれに対応する曖昧さ決定の成功率に関して言えば、結果は、データセット「P5−M0」について得られた結果(表3を参照)と実質的に同等である。
これらの制限は、最低限の調整しかできない、既存のシステムから提供されたデータセットを用いたことによるものである。より現実的なデータセット(たとえば、6つ以上の衛星から提供されたデータセット)を用いれば、測位決定におけるこれらの重大な制限は解消されよう。実際、よりよい幾何学的配置(幾何学的「DOP」(「精度低下率」)係数)、ならびに曖昧さ誤差を有する衛星(通常はゼロ、場合によって1つ)を検出してフィルタリングする機能を得ることが可能になる。これは、ナビゲーションフィルタまたは自律的な受信機監視アルゴリズムを用いることにより可能である。
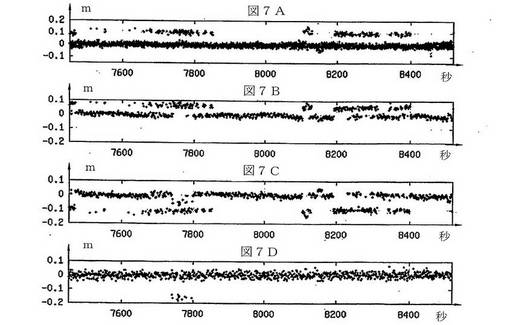
データセットP5−M0に含まれる4つの衛星に対応した結果を図7A〜7Dに示す。これらは、基準局REFから約129km離れている移動体SURについての、調整前の残差(図7A)、ならびに本発明による方法を実施した後の瞬時測位誤差の東成分(図7B)、北成分(図7C)、および垂直成分(図7D)を示している。グラフの縦軸の単位はm、横軸(遅延)の単位は秒である。
比較のために、実際の曖昧さについての対応するデータを図8A〜8Dに示す。
調整前の残差∇ΔLc(図7A)の主な特徴は、L1(約8%:図3を参照)の1サイクルの誤差に対応する約10cmの誤差である。これにより、ジャンプと同等の(「シングルエポック」)ナビゲーション誤差が発生する。これらは、図7B〜7Dにも見られる。これらは、対応する幾何学的「精度低下率」(「DOP」)係数によって増幅される。これらの、L1曖昧さの不正確な評価は、通常、エポックごとに利用可能な各3つ(測位決定に必要な最低数)の二重差のうちの1つに影響を及ぼすので、この誤差は、測位に3回影響を及ぼす(全エポックの約24%、三次元誤差の76%が5cm未満、100%が21cm未満)。誤差の分布はガウス分布ではないが、結果として得られる有効な3次元値(「RMS」)は、東成分、北成分、および垂直成分について、それぞれ7cm、3.5cm、および2cmである。
これらの結果をまとめると、曖昧さが正確に決定された場合(全テストの約92%、全エポックの約77%)の、東成分、北成分、および垂直成分の「RMS」誤差は、それぞれ1cm、1cm、および2cmである。また、曖昧さ決定が不正確なエポックを含む場合の、東成分、北成分、および垂直成分の「RMS」誤差は、それぞれ3cm、5cm、および2cmである。
さらに、搬送波位相二重差と瞬時(「シングルエポック」)ナビゲーション誤差との、調整前の残差計算によって減った測定値を、図8A〜8Dに示す。搬送波位相ノイズの大幅な増大が、特に垂直成分において見られ、約5cmの誤差が発生している。この(三次元「RMS」値の北成分、東成分、垂直成分がそれぞれ3cm、1.1cm、2cmであり、それぞれ約2cm、2cm、4cmではレベルが95%である)軌跡は、第1のエポックの間に曖昧さを正確に決定した後、瞬時(「シングルエポック」)モード解ではなく、リアルタイムフィルタを用いて得ることのできる解を非常に明確に表現する。
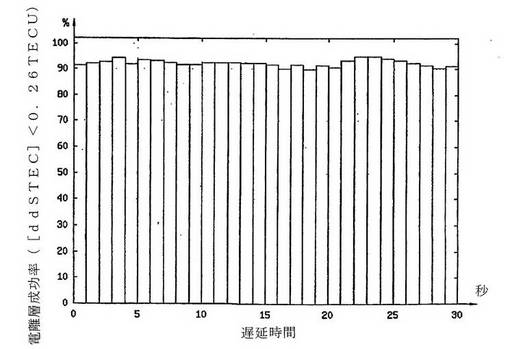
(たとえば、通信の潜在的な問題に起因する)電離層補正の遅延時間の影響を特徴づけるために、固定局のネットワークにおける電離層補正の計算について、1〜30秒(30エポック)の遅延を検討した。これらの各遅延について、129kmの距離にある移動体に対する「ddSTEC」(単位:TECU)の精度がちょうど0.26TECUになる場合の成功率を計算した。この成功率を、遅延時間(秒)の関数として、図9に示した。図から明らかであるように、30秒までは、遅延時間にかかわらず90%を超える成功率が達成されるので、遅延時間の影響は無視できる。
図10では、より長い遅延時間について検討したが、ここでは、電離層貫通点同士の近接が維持されるように、基準ネットワークと移動体の補正に対して同時に検討した。明らかに、5分を超えてから成功率が90%から85%へと低下している。10分を超えると、成功率がさらに低下し、75%に達する。これらの値は、電離層遅延差の変動がさらに大きくなる状況では、一層急激に低下する可能性がある。
明らかなことに、本発明による方法は、遅延時間を最大でも約5分(代表値)に保つことができるので、中緯度で遅延時間が重大な問題の原因になることはない。
以上の説明から、本発明が記載の目的を達成するのは明らかである。
本発明による方法は、電離層の断層モデルを用いるリアルタイム電離層補正を適用し、これに最低限の数の測地計算を組み合わせることにより、完全な瞬時曖昧さ決定を得ることを可能にする。この方法はさらに、基準局から100kmを超える距離において、1cm程度の精度を有するナビゲーションを可能にする。
本発明の好ましい応用は、異なる3つの周波数帯での搬送波送信を実施する、「GALLILEO」や「Modernized GPS」などの、将来の衛星ナビゲーションシステムにおいて実施されよう。
本発明による方法の主要な特徴によれば、10cm以内の精度を有する、この瞬時ナビゲーション機能は、電離層補正の適用を可能にするために、あまり複雑ではない「TCAR」タイプの三搬送波位相曖昧さ決定方法と、リアルタイム電離層モデルの決定とを組み合わせることによって成り立つ。
本明細書に記載の例示的な実験は、以下に示すように、等価な条件の下で先行技術の方法によって得られる結果からの著しい改善を示した。
・電離層モデルを生成しにくい状況(太陽極大期の正午)で、最寄りの地上固定基準局から100kmを超える距離において、ほぼ60%以下であった瞬時(「シングルエポック」)成功率がほぼ90%まで改善した。
・電離層補正において、この高い効率が、約5分の遅延時間で維持された。
・利用可能な衛星が4つに限られているにもかかわらず、データセットにおいて、例として継続される実験的条件に対し、対応するナビゲーションを、「シングルエポック」モードで瞬時に達成することができ、東成分、北成分、垂直成分がそれぞれ3cm、5cm、2cmである三次元「RMS」値を得ることが可能になった。
・好ましい実施形態において、単純な擬似距離マルチパス低減アプローチが方法に組み込まれていれば、リアルタイム曖昧さ完全性テストによって、性能を改善することができた。
・以下のように困難なケースでも性能が良好であることを実証した。
・低緯度(48度の代わりに35度)で、電離層の値がより高い場合。
・概して最高勾配が生成される、電離層の「北部赤道異常」の下の熱帯の局を基準とする極端な条件。後者のケースでは、ユーザが自身の電離層フィルタフィードを生成し、これを、基準ネットワークおよび自身の電離層観測からの補正と組み合わせる必要がある。
・最寄りの基準局から約140kmのところを飛行中の航空機が使用できる高精度の電離層補正を提供することを可能にした、高い力学。
ただし、本発明が、(特に図1〜8と併せて)明示的に記載された例示的実施形態だけに限定されないことを明確に理解されたい。
最後に、数値の例は、単に例として示したものであり、本発明の範囲に対していかなる種類の制限も与えるものではない。それらの数値の例は、当業者の能力の範囲内での単純な技術的選択から提供されたものである。
【0015】
【表1】
【0016】
【表2】
【0017】
【表3】
【0018】
【表4】
【0019】
【表5】
【0020】
【表6】
【図面の簡単な説明】
【0021】
【図1】Aは地球の部分断面、地球を取り巻く電離層の、ボクセルに区切られた部分断面、3つの通信衛星にある「GPS」送信機で生成される電波ビーム、およびそれらの信号を受信する3つの地上局を概略的に示した図である。 Bは移動体の「GPS」受信機から見た、本発明の方法を実現する完結したナビゲーションシステムの配置構成の概略図である。
【図2】同じ座標軸に対する地上基準局と移動体の基線および位置を概略的に表す図である。
【図3】図2を拡大して、同じ座標軸に対する移動体の軌跡を示した図である。
【図4】本発明によるリアルタイム電離層モデルから推定した遅延と実際の電離層遅延との比較の例を示すグラフである。
【図5】電離層の写実的なモデルを用いてリアルタイムで推定した「全電子数勾配(Slant Total Electron Content)」(「STEC」)の二重差と実際の値との比較の例を示すグラフである。
【図6】「STEC」の二重差の、リアルタイム電離層モデルによる決定における誤差と2つの電離層しきい値との比較の例を示すグラフである。
【図7】A〜Dは各ナビゲーション成分における推定誤差(単位:m)の例を示すグラフである。
【図8】A〜Dは同じナビゲーション成分における実際の誤差(単位:m)の例を示すグラフである。
【図9】遅延時間が1〜30秒の範囲である補正について、(「TECU」が0.26を超える)すべての曖昧さを決定するのに十分な大きさの電離層二重差の瞬時決定の成功率の例を示すグラフである。
【図10】遅延時間が900秒までの補正について、電離層二重差の瞬時決定の成功率の例を示すグラフである。
【特許請求の範囲】
【請求項1】
第1、第2、および第3の異なる周波数の三搬送波電波信号を用いてユーザ(移動体と称する)の位置を決定するリアルタイムナビゲーション方法であって、前記周波数の値は前記第1から前記第3にかけて大きくなり、前記電波信号が、地球周回軌道にあって前記移動体の視野内にある衛星に搭載された、所与の数の送信機から送信され、前記電波信号が、前記移動体に関連付けられた受信機と、基準局と呼ばれる複数の地上固定局の中の少なくとも1つの地上局に関連付けられた受信機とによって受信され、前記電波信号が、前記地球を取り巻く大気のいわゆる電離層を通り抜け、前記搬送波に位相曖昧さを発生させる擾乱を受け、少なくとも、
単一コード値を用いる擬似距離の組み合わせから、前記移動体(SUR)における、前記第3および第2の搬送波の位相差の、いわゆる「エクストラワイドレーン」曖昧さを決定する第1のステップと、
前記第1のステップで決定した前記「エクストラワイドレーン」曖昧さから、前記移動体(SUR)における、前記第1および第2の搬送波の位相差の、いわゆる「ワイドレーン」曖昧さを推定する第2のステップと、
前記第2のステップで推定した前記「ワイドレーン」曖昧さから、前記移動体(SUR)における、前記周波数のうちの1つの曖昧さを決定する第3のステップと、
前記第3のステップにおいて、連続的に更新される、前記電離層(CION)のリアルタイム電離層モデルに基づくリアルタイム電離層補正を適用する追加ステップとを含むことを特徴とする方法。
【請求項2】
前記第3のステップにおいて、前記曖昧さ決定が前記第1の搬送波周波数に対して実行されることを特徴とする請求項1に記載の方法。
【請求項3】
前記モデルが、地球(GT)の周回軌道にあって前記地上基準局(REF)の視野内にある前記衛星(SAT1−GPSE1〜SATn−GPSEn)のうちのあらかじめ決められた数の衛星から送信された信号を受信する前記地上基準局(REF)のうちの少なくとも1つによって決定される、前記電離層の写実的な電離層モデルであり、前記信号が、周波数の異なる、少なくとも2つの搬送波を含むことと、前記モデルが、前記送信された信号からの位相データから決定されることと、前記電離層モデルに対応するデータを送信するステップを含むこととを特徴とする請求項1または2に記載の方法。
【請求項4】
前記電離層モデルの決定が、前記電離層(CION)における自由電子分布の推定から得られることと、前記推定が、前記電離層(CION)を、前記電離層(CION)中を伝搬する前記信号の電波輻射によって照明されている、「ボクセル」と呼ばれる分解能体積単位(Voxijk)のグリッドに分割することによって大まかに実行され、前記電離層電子密度分布が任意の時点で一定であると想定されることと、前記決定が、いわゆるカルマンフィルタを用いる前記電波輻射によって照明されている前記体積単位(Voxijk)のそれぞれにおける平均電子密度のリアルタイム決定によって得られることとを特徴とする請求項3に記載の方法。
【請求項5】
前記電離層モデルに関連付けられたデータを、同時に計算された測地データと組み合わせることからなる追加ステップを含むことと、前記測地データが、前記地上固定基準局(REFM−REFME)のうちのマスタ局と呼ばれる1つによってのみ計算され、前記複数の地上固定基準局(REF)に配信されることとを特徴とする請求項4に記載の方法。
【請求項6】
前記第3および第2の搬送波の位相差の、いわゆる「エクストラワイドレーン」曖昧さを決定する前記第1のステップの間に、前記3つの搬送波に関連付けられた3つの擬似距離コードを用いることからなる追加ステップを含むことを特徴とする請求項1に記載の方法。
【請求項7】
擬似距離および「ワイドレーン」のコードと前記第2の周波数のコードとを用いて、前記第1の周波数の前記曖昧さ決定の誤差に関連付けられたジャンプを検出する完全性テストを実施することからなる追加ステップを含むことを特徴とする請求項2に記載の方法。
【請求項8】
前記請求項のいずれかに記載の方法を実施する衛星ナビゲーションシステムであって、
それぞれが異なる周波数の前記三搬送波信号を送信する、地球周回軌道(GT)にある複数の衛星(SAT1−GPSE1〜SATn−GPSEn)と、前記信号の受信機(SURGPS)と、
前記第1から第3のステップを実行し、前記複数の衛星(SAT1−GPSE1〜SATn−GPSEn)から送信された前記信号の輻射電波が通り抜ける電離層の領域の写実的な電離層モデルから導出された前記電離層補正を組み込む組み込み計算手段とを備える少なくとも1つの移動体(SUR)と、
それぞれが、前記衛星から送信された前記信号を受信する受信機(REFGPS)と、前記電離層(CION)の前記写実的な電離層モデルを決定する組み込み計算手段と、前記電離層モデルに対応するデータを移動体(SUR)の前記受信機(SURGPS)に送信する送信機(REFE)とを備える、複数の、基準局(REF)と呼ばれる地上固定局とを含むことと、
前記地上固定基準局のうちのマスタ局(REFM)と呼ばれる少なくとも1つが、前記複数の衛星(SAT1−GPSE1〜SATn−GPSEn)から送信される前記信号の受信機(REFMGPS)と、測地データの計算手段と、前記測地データを前記複数の地上固定基準局(REF)に配信する送信機(REFME)を備えることとを特徴とするシステム。
【請求項9】
前記移動体(SUR)が、最寄りの地上固定基準局(REF)から100kmを超える距離にあることを特徴とする請求項8に記載のシステム。
【請求項1】
第1、第2、および第3の異なる周波数の三搬送波電波信号を用いてユーザ(移動体と称する)の位置を決定するリアルタイムナビゲーション方法であって、前記周波数の値は前記第1から前記第3にかけて大きくなり、前記電波信号が、地球周回軌道にあって前記移動体の視野内にある衛星に搭載された、所与の数の送信機から送信され、前記電波信号が、前記移動体に関連付けられた受信機と、基準局と呼ばれる複数の地上固定局の中の少なくとも1つの地上局に関連付けられた受信機とによって受信され、前記電波信号が、前記地球を取り巻く大気のいわゆる電離層を通り抜け、前記搬送波に位相曖昧さを発生させる擾乱を受け、少なくとも、
単一コード値を用いる擬似距離の組み合わせから、前記移動体(SUR)における、前記第3および第2の搬送波の位相差の、いわゆる「エクストラワイドレーン」曖昧さを決定する第1のステップと、
前記第1のステップで決定した前記「エクストラワイドレーン」曖昧さから、前記移動体(SUR)における、前記第1および第2の搬送波の位相差の、いわゆる「ワイドレーン」曖昧さを推定する第2のステップと、
前記第2のステップで推定した前記「ワイドレーン」曖昧さから、前記移動体(SUR)における、前記周波数のうちの1つの曖昧さを決定する第3のステップと、
前記第3のステップにおいて、連続的に更新される、前記電離層(CION)のリアルタイム電離層モデルに基づくリアルタイム電離層補正を適用する追加ステップとを含むことを特徴とする方法。
【請求項2】
前記第3のステップにおいて、前記曖昧さ決定が前記第1の搬送波周波数に対して実行されることを特徴とする請求項1に記載の方法。
【請求項3】
前記モデルが、地球(GT)の周回軌道にあって前記地上基準局(REF)の視野内にある前記衛星(SAT1−GPSE1〜SATn−GPSEn)のうちのあらかじめ決められた数の衛星から送信された信号を受信する前記地上基準局(REF)のうちの少なくとも1つによって決定される、前記電離層の写実的な電離層モデルであり、前記信号が、周波数の異なる、少なくとも2つの搬送波を含むことと、前記モデルが、前記送信された信号からの位相データから決定されることと、前記電離層モデルに対応するデータを送信するステップを含むこととを特徴とする請求項1または2に記載の方法。
【請求項4】
前記電離層モデルの決定が、前記電離層(CION)における自由電子分布の推定から得られることと、前記推定が、前記電離層(CION)を、前記電離層(CION)中を伝搬する前記信号の電波輻射によって照明されている、「ボクセル」と呼ばれる分解能体積単位(Voxijk)のグリッドに分割することによって大まかに実行され、前記電離層電子密度分布が任意の時点で一定であると想定されることと、前記決定が、いわゆるカルマンフィルタを用いる前記電波輻射によって照明されている前記体積単位(Voxijk)のそれぞれにおける平均電子密度のリアルタイム決定によって得られることとを特徴とする請求項3に記載の方法。
【請求項5】
前記電離層モデルに関連付けられたデータを、同時に計算された測地データと組み合わせることからなる追加ステップを含むことと、前記測地データが、前記地上固定基準局(REFM−REFME)のうちのマスタ局と呼ばれる1つによってのみ計算され、前記複数の地上固定基準局(REF)に配信されることとを特徴とする請求項4に記載の方法。
【請求項6】
前記第3および第2の搬送波の位相差の、いわゆる「エクストラワイドレーン」曖昧さを決定する前記第1のステップの間に、前記3つの搬送波に関連付けられた3つの擬似距離コードを用いることからなる追加ステップを含むことを特徴とする請求項1に記載の方法。
【請求項7】
擬似距離および「ワイドレーン」のコードと前記第2の周波数のコードとを用いて、前記第1の周波数の前記曖昧さ決定の誤差に関連付けられたジャンプを検出する完全性テストを実施することからなる追加ステップを含むことを特徴とする請求項2に記載の方法。
【請求項8】
前記請求項のいずれかに記載の方法を実施する衛星ナビゲーションシステムであって、
それぞれが異なる周波数の前記三搬送波信号を送信する、地球周回軌道(GT)にある複数の衛星(SAT1−GPSE1〜SATn−GPSEn)と、前記信号の受信機(SURGPS)と、
前記第1から第3のステップを実行し、前記複数の衛星(SAT1−GPSE1〜SATn−GPSEn)から送信された前記信号の輻射電波が通り抜ける電離層の領域の写実的な電離層モデルから導出された前記電離層補正を組み込む組み込み計算手段とを備える少なくとも1つの移動体(SUR)と、
それぞれが、前記衛星から送信された前記信号を受信する受信機(REFGPS)と、前記電離層(CION)の前記写実的な電離層モデルを決定する組み込み計算手段と、前記電離層モデルに対応するデータを移動体(SUR)の前記受信機(SURGPS)に送信する送信機(REFE)とを備える、複数の、基準局(REF)と呼ばれる地上固定局とを含むことと、
前記地上固定基準局のうちのマスタ局(REFM)と呼ばれる少なくとも1つが、前記複数の衛星(SAT1−GPSE1〜SATn−GPSEn)から送信される前記信号の受信機(REFMGPS)と、測地データの計算手段と、前記測地データを前記複数の地上固定基準局(REF)に配信する送信機(REFME)を備えることとを特徴とするシステム。
【請求項9】
前記移動体(SUR)が、最寄りの地上固定基準局(REF)から100kmを超える距離にあることを特徴とする請求項8に記載のシステム。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】

【図7】
【図8】

【図9】
【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公表番号】特表2006−510893(P2006−510893A)
【公表日】平成18年3月30日(2006.3.30)
【国際特許分類】
【出願番号】特願2004−561578(P2004−561578)
【出願日】平成15年12月16日(2003.12.16)
【国際出願番号】PCT/FR2003/050176
【国際公開番号】WO2004/057364
【国際公開日】平成16年7月8日(2004.7.8)
【出願人】(505229025)
【Fターム(参考)】
【公表日】平成18年3月30日(2006.3.30)
【国際特許分類】
【出願日】平成15年12月16日(2003.12.16)
【国際出願番号】PCT/FR2003/050176
【国際公開番号】WO2004/057364
【国際公開日】平成16年7月8日(2004.7.8)
【出願人】(505229025)
【Fターム(参考)】
[ Back to top ]