
Fターム[5J062EE02]の内容
Fターム[5J062EE02]に分類される特許
1 - 20 / 85
人工衛星ベースの受信機に対するSBAS支援情報を持ったAGPSサーバ
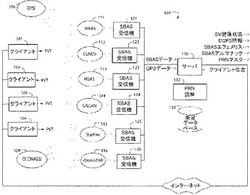
【課題】特定の地表位置から視認可能な静止衛星型衛星航法増補システム(SBAS)の情報を提供される航法受信機が、それらから視認可能なSBAS衛星の擬似乱数(PRN)信号をインテリジェントに探索、捕捉、および追跡することができるようにする。
【解決手段】人工衛星航法システム支援サーバは、クライアント位置の表示を含むクライアントの要求に応答するように構成されている。人工衛星航法システム支援サーバは、正確な位置がサーバ要求に含まれる場合には、どの特定のSBASシステムが要求中のクライアントから観測可能であるかを演算する。この場合には、その応答を、人工衛星航法システム支援サーバは、よりコンパクトな応答メッセージに対する関連情報に制限する。
(もっと読む)
方位・仰角測定システム

【課題】到来信号の方位および仰角を精密に測定できる方位・仰角測定システムを提供する。
【解決手段】複数のアンテナ111〜11pと、複数のアンテナから得られる複数のアンテナ受信信号に基づき推定した到来波数と到来信号を用いてレイトレーシングによる電波伝搬経路推定を行って到来方向を求め、該求めた到来方向を初期値として到来方位および仰角を測定する信号処理装置15を備えている。
(もっと読む)
海面における中周期波の計測方法および計測装置
【課題】GPS単独測位方式を用いた場合でも中周期波を精度良く計測し得る海面における中周期波の計測方法を提供する。
【解決手段】海面に係留された浮体Fに設けられたGPS受信機31にて観測される搬送波位相を用いた精密変動観測法(PVD法)により、浮体の変動量を検出して海面の中周期波を計測する際に、GPS受信機の距離計測部で求められた搬送波位相距離に含まれているGPS衛星の時計誤差、電離層遅延量および対流圏遅延量を精密に算出し、そしてこれらの誤差成分を上記求められた搬送波位相距離から除去した後、バンドパスフィルタをかけることにより、上記搬送波位相距離から30秒〜2分までの中周期変動成分を抽出する方法である。
(もっと読む)
電離層遅延評価装置および航法装置
【課題】本発明は、衛星航法系において、誤差の要因となる電離層遅延を求める電離層遅延評価装置と、その電離層遅延評価装置またはこれに代わる装置との連係に必要なインタフェースの機能を有する航法装置とに関し、ハードウェアの規模が大幅に増加することなく、電離層遅延の補正を精度よく安定に実現できることを目的とする。
【解決手段】航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2の差Δdと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する電離層状態推定手段と、前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める遅延算出手段とを備える。
(もっと読む)
受信信号判定方法、プログラム、測位装置、及び電子機器
【課題】AGCゲインを調節しクロスコリレーションを排除する受信信号判定方法、プログラム、測位装置、及び電子機器を提供する。
【解決手段】受信信号判定方法は、受信した第1測位信号のSNRが所定値以上の信号であるか否か(ステップS40)、第1測位信号と第2測位信号とが同じ情報であるか否か(ステップS50)、第1測位信号と第2測位信号とが同じ周波数であるか否か(ステップS60)、及び第2測位信号のSNRが所定値以下であるか否か(ステップS70)を判定することで、第1及び第2測位信号間でクロスコリレーションが発生しているか否かを判定すること、を含み、クロスコリレーションが発生していると判定した場合、第2測位信号のSNRが受信される通信信号のSNRの範囲の最低値未満になるように、AGCを制御する。
(もっと読む)
方位角推定装置及びプログラム
【課題】マルチパスを適切に判定して、精度良く移動体の方位角を推定する。
【解決手段】複数のGPS衛星の各々から発信されたGPS情報を取得し、方位角推定部30で、GPS情報に基づいて自車両の方位角(推定方位角)を推定する。最適推定部62は、ジャイセンサ14の検出値に基づいて自車両の方位角(観測方位角)を算出し、推定方位角と観測方位角とを統合して最適値を推定する。精度判定部64は、最適値と推定方位角との残差の分散が閾値以下か否かに基づいて、最適値の精度を判定する。速度ベクトル算出部66は、最適値の精度が高いと判定された場合には、最適値を推定する方位角として採用し、最適値及び速度センサ16で検出された速度を用いて速度ベクトルを算出し、精度が低いと判定された場合には、過去に推定された方位角を用いてジャイロセンサ14の検出値を積算して算出した方位角を採用して、速度ベクトルを算出する。
(もっと読む)
擬似的距離測定値の選定による位置推定の修正方法
【課題】擬似的距離測定値の選定による位置推定の修正方法を提供する。
【解決手段】改善された位置Xhuberが、ナビゲーション受信機とN基の衛星との間の測定距離に相当する、擬似的距離ρiのN個の測定値(102)、及び前記受信機によってなされた前記受信機の位置の推定値Xprim(103)を用いて、ロバスト推定アルゴリズムの適用(104)により決定される。測定値ρiからの擬似的距離の剰余Δρihuberよりのノルム剰余値Δrihuberを決定するステップと、N−k個のノルム剰余値Δrihuberを含むシグマ(ギリシア文字σの大文字)個の部分集合(105、106)を決定するステップ(111)と、最小の標準偏差σSEOを伴う部分集合SEOを選定するステップと、異常でない測定値を選定するステップ(107)と、選定された測定値からの位置の修正された推定値Xclnを決定するステップとを含む。
(もっと読む)
衛星航法システムにおける電離圏異常を検出する方法及びその装置。
【課題】 1周波数のみの観測データを用い、基準局とモニタ局間の基線長に影響されない衛星航法システムにおける電離圏異常を検出する事。
【解決手段】 基準局とモニタ局で取得した衛星データの1周波数のみのコード疑似距離と搬送波位相の観測データの搬送波位相及び電離圏フリー線形結合の受信機間一重差を求め、SD電離圏遅延、SD搬送波位相バイアス、SD受信機時計誤差を状態変数とする全航法衛星を利用した観測方程式を構成し、状態変数を最小二乗原則でエポック毎に推定して観測方程式のフロート解を求め、SD搬送波位相バイアスをDDに変換し、整数不定性決定手法によりDD搬送波位相バイアスの整数解の候補を求め、この候補に対し検定を実行して観測方程式のフィックス解を求め、基準局とモニタ局間の推定したSD電離圏遅延、SD受信機時計誤差を修正し、最終的に得たSD電離圏遅延により電離圏異常を検出する。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法及び装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法及びカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
地上補強型衛星航法システム、該システムに用いられる衛星異常検出方法及び衛星異常検出プログラム
【課題】空港周辺の所定距離内の空域で航空機の進入着陸誘導を行う地上補強型衛星航法システム中で、衛星の異常を検出する精度を向上させる。
【解決手段】各測位信号のうちで、傾斜した電離層を越えて伝搬する測位信号があるとき、擬似距離補正値補正手段(擬似距離補正値補正部23a)により、同測位信号に対応した擬似距離補正値に対して、対応する測位衛星(GPS衛星10)の測位手段(GPSアンテナ21、GPS受信機22)に対する仰角の関数で表される電離層傾斜係数を用いて正規分布に近付くように補正して各検定統計量として生成される。衛星異常検出手段(インテグリティモニタ23b)により、擬似距離補正値補正部23aで生成された各検定統計量を用いて各GPS衛星10の異常の有無が検出される。
(もっと読む)
相対速度計測装置および相対変位計測装置
【課題】本発明は、衛星航法系を構成する航行衛星の相対速度と相対変位とをそれぞれ求める相対速度計測装置および相対変位計測装置に関し、航行衛星の相対速度の値域が制限されている場合であっても、所望の航行衛星の相対速度や相対変位を効率的にかつ精度よく求めることを目的とする。
【解決手段】衛星航法系を構成する1つの航行衛星について求められ、かつ値域r1、…、rpを個別に有する複数pの相対速度y1、…、ypと、前記値域r1、…、rpの幅w1、…、wpと、前記幅w1、…、wpに対応する整数h1、…、hpとに対してE=y1+w1・h1=…=yp+wp・hpが所定の精度で成立する相対速度Eを得る。
(もっと読む)
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法
【課題】浮動バイアス値を短時間で決定する。
【解決手段】ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する。静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化する。その後、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知として扱われて、WADGPSシステム内でユーザー受信器を測位する。
(もっと読む)
衛星航法システムにおける測位誤差の補正方法及びその装置。
【課題】 1周波型GPS受信機の測位誤差を小さくする。
【解決手段】 航法衛星からの測位信号のクロック及び航法衛星の軌道、電離層による伝搬遅延の補正情報を求めて、ユーザ局へ送信するマスタ局と、既知点に設置された複数のモニタ局と、マスタ局と複数のモニタ局を結ぶネットワークとからなる衛星航法システムにおいて、マスタ局は、モニタ局で受信された2周波の測位データから電離層遅延量を計算し、この電離層遅延量から、1周波型GPS受信機で利用可能な電離層遅延量の補正情報であって、経緯度5度毎に作成されたグリッド点毎の情報であるグリッド情報を作成し、このグリッド情報から、クロックの補正情報と軌道の補正情報を計算して、グリッド情報と共にこれらの補正情報をユーザ局へ送信し、ユーザ局は、これらの補正情報を用いて航法衛星からの測位信号の補正を行い、自局の測位を行う。
(もっと読む)
電子密度推定装置及び電子密度推定方法
【課題】衛星から送信される信号による通過経路の電離層電子密度分布を推定する際に、既知の放送局からの信号を利用して3次元の電離層電子密度分布をより正確に推定する。
【解決手段】アレイアンテナが受信した電波の到来方位と仰角とを算出する第1算出部と、衛星信号の通過経路の総電子数を算出する総電子数算出部と、電子密度を推定する3次元空間を設定し当該3次元空間を複数の領域に分割する3次元電子密度推定空間設定部36と、領域毎の電子密度を推定する電子密度推定部38と、アレイアンテナが受信した電波のホップ数を算出するホップ数算出部39と、ホップ数に基づいて算出したアレイアンテナから送信源までの距離と実際の距離との差が所定のしきい値以下である場合に電子密度推定部による推定結果を正しいと判定する判定部41と、判定部41の判定結果に応じて電波の伝搬経路における電子密度を修正する修正部43とを備える。
(もっと読む)
過剰遅延勾配を監視する地上システムおよび方法
【課題】衛星信号の水平遅延勾配を監視する処理機能部を提供すること。
【解決手段】処理機能部は、衛星差分モジュール、二重差分モジュール、および勾配推定器モジュールを含む。衛星差分モジュールは、互いに既知の幾何学的関係を有する少なくとも2つの基準受信機から、少なくとも2つの衛星の搬送波位相測定値を受け取る。衛星は、被監視衛星および少なくとも1つの他の衛星を含む。衛星差分モジュールは、被監視衛星からの信号と少なくとも1つの他の衛星からの信号との搬送波位相測定値の差分を決定する。二重差分モジュールは、少なくとも2つの基準受信機の対の間の二重差分を形成し、対の間の二重差分を基準受信機の既知の位置の差で補償し、二重差分を平均化する。勾配推定器モジュールは、被監視衛星に関する平均化された補償二重差分に基づいて水平遅延勾配の大きさを推定する。
(もっと読む)
補助されたモードにおいて動作する擬似衛星を用いた位置決定システム
周波数間バイアス推定装置及び周波数間バイアス推定方法
【課題】昼間と夜間との電離層の状態の違いを考慮してより正確な推定を可能とする周波数間バイアス推定装置及び周波数間バイアス推定方法を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する周波数間バイアス推定装置32であって、電離層電子密度モデル関数に基づき総電子数モデル値を算出するモデル値算出部34と、夜間に観測された衛星信号の観測値と総電子数モデル値とに基づいて第1受信機依存周波数間バイアスを推定する夜間観測データ処理部36と、昼間に観測された衛星信号の観測値と総電子数モデル値と第1受信機依存周波数間バイアスとに基づいて衛星依存周波数間バイアス補正量を算出するとともに、衛星依存周波数間バイアス補正量に基づいて第1衛星依存周波数間バイアスを推定する昼間観測データ処理部37とを備える。
(もっと読む)
電子密度推定装置及び電子密度推定方法
【課題】3次元の高さ方向及び水平方向の電離層電子密度分布をより正確に推定し、衛星で観測できない空間部分の推定も可能とする電子密度推定装置を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する電子密度推定装置であって、1以上の受信機の各々から複数の測位衛星の各々に対する擬似距離およびキャリア位相擬似距離に基づき衛星信号の通過経路の総電子数を算出する総電子数算出部と、電子密度を推定する3次元空間を設定し、当該3次元空間を複数の領域に分割する3次元電子密度推定空間設定部36と、総電子数算出部により算出された総電子数に基づいて3次元電子密度推定空間設定部36により分割された領域毎の電子密度を推定する暫定電子密度推定部38と、推定された電子密度に基づいて、同じ高さの電子密度を抽出し、球面調和関数を用いて高さ毎の電子密度分布を近似して推定する3次元電子密度推定部39とを備える。
(もっと読む)
小型端末のGPS測位システム
【課題】 大幅なコストアップをせずに測位精度の向上を図る。
【解決手段】 小型端末のGPS測位システムは、無線LANと第1のGPS受信機を有する小型端末20と、無線LANのアクセスポイントであり第2のGPS受信機を有するホットスポット10とを有する。ホットスポット10は、第2のGPS受信機によるGPS測位によって得られた第1のホットスポット位置10aと、予め決められている第2ホットスポット位置10bとから誤差情報を求める。小型端末20は、誤差情報に基いて第1のGPS受信機によりGPS測位した端末位置を補正する。
(もっと読む)
データ送信装置及びデータ送信方法及び測位装置
【課題】時間の経過と共に更新が必要な測位の補正データについて、データ送信量の低減と、より新しい補正データの提供とを両立させ、提供する補正データの精度を向上させる装置を提供する。
【解決手段】データ送信部は、それぞれの測位補強情報を伝送周期10秒で伝送する。第1計算部は、データ送信部により所定の順序に従って伝送中の測位補強情報31−1の伝送周期10秒の間に、基準点固有誤差を新たに計算する。第2計算部は、伝送中の測位補強情報31−1の伝送周期10秒の間に、それぞれの測位補強情報41〜43を新たに計算された基準点固有誤差に基づいて新たに生成する。データ送信部は、新たに生成された測位補強情報41〜43のうちの一つの測位補強情報42−1を所定の順序に従って伝送中の測位補強情報31−1の次に配信装置に伝送すると共に、所定の順序を周期的に繰り返しながら、測位補強情報を順次に前記配信装置に伝送する。
(もっと読む)
1 - 20 / 85
[ Back to top ]