
遠心分離機

【課題】
ゾーナルモードと通常モードの設定ミスを効果的に検出して、ロータを高速回転させる前にユーザに通知するようにした遠心分離機を提供する。
【解決手段】
ロータの回転開始前に試料を注入しておく通常運転モードと、ロータの回転中に試料を注入するゾーナルモードを有する遠心分離機において、制御部は、通常運転モードを開始した後に装着されているロータの種類を判別し(ステップ57)、ロータがゾーナルモード用のロータであると判別された場合にはゾーナルモードへの切り替えを自動で行うようにした(ステップ59〜66)。この際、稼働していた真空ポンプを停止させて、ロータ室を大気圧にしてドアロックを解除し、ユーザにゾーナルモードへの切り替えをするか選択させる。
ゾーナルモードと通常モードの設定ミスを効果的に検出して、ロータを高速回転させる前にユーザに通知するようにした遠心分離機を提供する。
【解決手段】
ロータの回転開始前に試料を注入しておく通常運転モードと、ロータの回転中に試料を注入するゾーナルモードを有する遠心分離機において、制御部は、通常運転モードを開始した後に装着されているロータの種類を判別し(ステップ57)、ロータがゾーナルモード用のロータであると判別された場合にはゾーナルモードへの切り替えを自動で行うようにした(ステップ59〜66)。この際、稼働していた真空ポンプを停止させて、ロータ室を大気圧にしてドアロックを解除し、ユーザにゾーナルモードへの切り替えをするか選択させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はゾーナルロータを使用する遠心分離機に関し、特にゾーナルロータに試料を注入しない状態で誤って高速回転させてしまうことを防止することができる遠心分離機に関する。
【背景技術】
【0002】
遠心分離機を使った遠心分離法の一つとしてゾーナル遠心法が知られている。ゾーナル遠心法は密度勾配液と試料を遠心して、試料中に含まれる物質を大きさや重さに応じて分離分画する方法で、例えば生物学、医学、農学等の分野で細胞内物質やウイルス等の微小粒子の分離に使用される。
【0003】
実験室的には、スイングロータに試料を注入したプラスチック製試験管をロータのバケットに挿入して回転するものが使用されるが、より大容量形としてゾーナルロータ(Zonal Rotor)と呼ばれる製品が、販売、使用されている。例えば、出願人によってP35ZT形ゾーナルロータが製造及び販売されている。これらのゾーナルロータは、スイングロータに比べ、“WALL EFFECT”がないため試料の乱れが少ないこと、容量が大きいこと、試料の注入、回収、分析操作が回転中に連続的に行える等の特長を有しており、主にワクチン製造などの大容量、高精度が要求される分離に広く使用されている。
【0004】
ゾーナルロータを使用したゾーナル遠心分離法は、低速回転で整定させたゾーナルロータ中に、遠心力の方向にしだいに濃くなる密度勾配液を作成し、試料を注入して所定の高速回転で分離後に低速回転に再び整定させ、更に密度が大きい液体を注入し試料を回収する方法である。ここで、試料を注入および回収する時の回転速度は3,000rpm程度とされる。
【0005】
遠心分離機でゾーナルロータを使用して運転する場合、ドアを開けた状態で回転中に試料の注入および回収を行うため、一般的なロータの使用方法と大きく異なる。そのため、ゾーナルロータを使用する遠心分離機は、ゾーナルロータの運転用に専用の運転モードであるゾーナルモードに切り替えられるようになっている。
【0006】
遠心分離機は特許文献1に示されるように、ロータに磁性皮膜を備えた磁気記録媒体を設け、磁気ヘッドでデータの記録および再生を行い、ロータの種類の判別や運転実績管理を記録させる方法が提案されている。また、下記特許文献2に示されるように、ロータの底部に円周上に配置された複数のマグネットの角度からロータの種類を判別し、ロータの過回転を防止させる方法が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平3−181347号公報
【特許文献2】特開平8−108098号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述した遠心分離機では、ゾーナルロータを装着したまま誤って通常モードで運転を開始させてしまうと、あらかじめ設定した高速回転速度まで加速してしまい、低速(例えば3,000rpm)の回転速度で試料の注入が行えないことになる。さらに、ゾーナルロータ内に試料が無い状態で、高速の設定回転速度で回転させることになるので、ゾーナルロータ内に配置されるセプタに試料の液圧が加わらず、セプタへ大きな遠心応力が加わってしまい、セプタが短寿命となる問題があった。
【0009】
上記問題を解決するために、通常モードでロータを運転する場合にもゾーナルモードでの制御と同様に低速の回転速度で一旦整定させる方法が考えられるが、使い勝手が悪くなる問題があった。また、ロータの回転加速時間から試料の有無を判断して、試料が入っていないと判断された場合にのみ低速の回転速度で一旦整定させる方法が考えられるが、同じような慣性モーメントの他のロータを装着した場合も一旦停止させてしまう恐れがあり、使い勝手が悪くなる問題があった。
【0010】
本発明は上記背景に鑑みてなされたもので、その目的は、ゾーナルモードと通常モードの設定ミスを効果的に検出して、ロータを高速回転させる前にユーザに通知するようにした遠心分離機を提供することにある。
【0011】
本発明の他の目的は、ゾーナルロータのセプタを短寿命にすること無く、信頼性を高めた遠心分離機を提供することである。
【0012】
本発明のさらに他の目的は、ユーザが運転モードの設定を誤った場合でも、迅速にリカバリーして正しい運転モード(ゾーナルモード)での運転を再開することができる遠心分離機を提供することにある。
【課題を解決するための手段】
【0013】
本願において開示される発明のうち代表的なものの特徴を説明すれば次の通りである。
【0014】
本発明の一つの特徴によれば、分離する試料を保持するロータと、ロータを収納するロータ室と、ロータ室内を封じるドアと、ロータを回転させるモータと、モータの回転を制御する制御部と有し、ロータの回転開始前に試料を注入しておく通常運転モードと、ロータの回転中に試料を注入するゾーナルモードを有する遠心分離機において、制御部は、通常運転モードを開始した後に装着されているロータの種類を判別し、ロータがゾーナルモード用のロータであると判別された場合にはゾーナルモードへの切り替えを自動で行うようにした。通常モードを運転し、ロータ判別手段で判別されたロータの種類がゾーナルロータであった場合は、制御部が異常と判断してその後の処理を行う。
【0015】
本発明の他の特徴によれば、ゾーナルモードにおいては、試料を注入するためにロータを5,000rpm以下の第一の回転速度に整定し、試料を注入後にロータを5,000rpm以上の設定回転速度に加速させる。ロータには固有情報を示す手段が設けられ、遠心分離機には固有情報を読み取るためのロータ判別手段が設けられ、ロータ判別手段は、ロータの回転が開始した直後に固有情報を読み出すようにした。また遠心分離機に表示部を設け、通常運転モードを開始した後に装着されているロータがゾーナルモード用のロータであると判別された場合に、制御部はゾーナルモードへの切り替えが可能であるかを判定し、可能の場合はゾーナルモードへの切り替えを行うか否かの問い合わせ表示(ダイアログ表示)を行い、不可能な場合はエラーメッセージを表示してロータの回転を停止させるように構成した。
【0016】
本発明のさらに他の特徴によれば、ロータを第一の回転速度に整定させた際に、制御部がゾーナルロータへ試料注入の有無を確認するための確認画面を表示部へ表示する。遠心分離機には、ロータ室を減圧する減圧装置と、ロータ室の減圧状態を解除するバルブを設け、通常運転モードを開始した後にロータがゾーナルモード用のロータであると判別された場合には減圧装置の運転を停止してバルブを開放し、ロータ室を大気圧とする。減圧装置により所定の真空度に到達するまで低速回転で待機する第二の回転速度を設定し、第一の回転速度は第二の回転速度よりも低く設定した。
【発明の効果】
【0017】
請求項1の発明によれば、ユーザの使い勝手を悪化させること無く、ゾーナルロータのセプタの短寿命を防止した品質の高い遠心分離機を提供することができる。また、判別されたロータがゾーナルロータであった場合は、制御部が特別な処理を実行してその後の処理を行うことでセプタの短寿命を防止することができる。更にゾーナルロータを使用した場合にのみ特別な処理を行うため、ユーザの操作負担を最小限にすることができる。
【0018】
請求項2の発明によれば、試料を注入するためにロータを5,000rpm以下の第一の回転速度に整定し、試料を注入後にロータを5,000rpm以上の設定回転速度に加速させるので、ゾーナルロータ内のセプタの遠心応力を抑えることでセプタの短寿命を防止することができる。
【0019】
請求項3の発明によれば、ロータ判別手段は、ロータの回転が開始した直後に固有情報を読み出すので、制御部は設定された運転モードと装着されたロータの種類が一致するかを確実に判別することができる。
【0020】
請求項4の発明によれば、制御部はゾーナルモードへの切り替えが可能であるかを判定し、可能の場合はゾーナルモードへの切り替えを行うか否かのダイアログ表示を行うのでユーザに試料注入を行うかどうかの確認を行うことができる。また、ゾーナルモードへの切り替えが不可能な場合はエラーメッセージを表示してロータの回転を停止させるので、ゾーナルロータ内のセプタに過大な遠心応力がかかることを防止でき、セプタの短寿命化を阻止することができる。
【0021】
請求項5の発明によれば、ロータを第一の回転速度に整定させた際に、制御部がゾーナルロータへ試料注入の有無を確認するための確認画面を表示部へ表示するので、信頼性を高めることができるとともに、ロータの装着誤りの場合にユーザは即座にロータの回転を停止させることができる。
【0022】
請求項6の発明によれば、通常運転モードを開始した後にロータがゾーナルモード用のロータであると判別された場合には減圧装置の運転を停止してバルブを開放し、ロータ室を大気圧とするので、試料注入のための事前準備を制御部が自動で行うことができ、ユーザによる操作を減らすことができる。また、試料注入に至る操作時間の短縮を図ることができる。
【0023】
請求項7の発明によれば、減圧装置により所定の真空度に到達するまで低速回転で待機する第二の回転速度を設定し、第一の回転速度は第二の回転速度よりも低く設定したので、所定の真空度に到達するまで待機速度に影響されずに、試料の注入に適した任意の回転速度を設定することができる。
【0024】
本発明の上記及び他の目的ならびに新規な特徴は、以下の明細書の記載及び図面から明らかになるであろう。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例に係る遠心分離機の全体構成を示す断面図である。
【図2】本発明の実施例に係る遠心分離機のゾーナルロータの断面図である。
【図3】本発明の実施例に係るゾーナルロータへの試料注入/回収時のゾーナルロータの断面図である。
【図4】本発明の実施例に係る遠心分離機の遠心分離運転状態におけるゾーナルロータの部分断面図である。
【図5】本発明の実施例に係る遠心分離機の制御手順を示すフローチャートである(その1)。
【図6】本発明の実施例に係る遠心分離機の制御手順を示すフローチャートである(その2)。
【図7】遠心分離機のノーマルモードにおける各部の動作を示したタイムチャートである。
【図8】遠心分離機のゾーナルモードにおける各部の動作を示したタイムチャートである。
【図9】本発明の実施例に係る遠心分離機においてノーマルモードからゾーナルモードに変更される際の各部の動作を示したタイムチャートである。
【発明を実施するための形態】
【実施例1】
【0026】
以下、本発明の実施例を図面に基づいて説明する。なお、以下の図において、同一の部分には同一の符号を付し、繰り返しの説明は省略する。また、本明細書においては、前後、上下の方向は図1に示す方向であるとして説明する。
【0027】
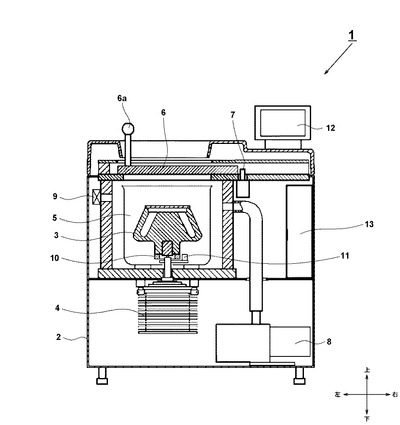
図1は本発明の実施例に係る遠心分離機の全体構成を示す断面図である。遠心分離機1は、上面から見た断面形状が略四角形を有する筐体2を備え、筐体2の内部には、分離する試料を保持するためのロータ3と、ロータ3に回転駆動力を与えるための駆動モータ4と、ロータ3を収納するロータ室5とを有し、また、筐体2内に形成されたロータ室5の上部開口部(開閉部)には、スライド式のドア6が筐体2に対し開閉自在に取付けられる。ドア6の近傍にはドアロック機構7が設けられ、ロータが回転中はドア6が開かないようにロックする。また、筐体2には運転条件の設定や運転操作、ゾーナルモードの切り替え操作と回転速度などの運転状況を表示させる操作表示部12が設けられる。ロータ室5には真空ポンプ8が接続されている。尚、本実施例では真空ポンプを油回転真空ポンプだけで構成しているが、ロータ室5と油回転真空ポンプの間に、さらに油拡散真空ポンプ(図示せず)を配置しても良く、一種類もしくは複数の真空ポンプの組合せた真空ポンプ8によりロータ室5を減圧しても良い。ロータ室5を減圧するのはロータ3が高速回転したときにロータ室5の内部の空気とロータ3との風損(摩擦熱)の発生を抑制するためである。
【0028】
ロータ室5には外部からの空気の流入を遮断する電磁バルブ9が設けられ、運転終了時には電磁バルブ9を開くことで減圧されたロータ室5内部へ空気を送り込みロータ室5の内部を大気圧にする。ロータ3は底部にアダプタ10が設けられ、アダプタ10はロータの種類を識別するための情報を有する。例えば、アダプタ10の外周の一部に磁性皮膜を設け、この磁性皮膜と対向する位置にロータ判別手段11(磁気ヘッド)を配置することで、磁性皮膜に記憶させたデータをロータ判別手段11を介して読み取ることができる。別の方法として、アダプタ10に複数のマグネットを配置し、磁気検出手段等のロータ判別手段11によってマグネットの配置によって示される情報を読み取ることができる。
【0029】
制御部13は、図示しないマイクロコンピュータを含み、駆動モータ4の回転制御、真空ポンプ8の運転・停止制御、ドアロック機構7の制御、ロータ判別手段11によるロータ3の判別、操作表示部12への情報の表示と入力データの取得、電磁バルブ9の開閉等、遠心分離機1の全体制御を行う。
【0030】
次に、ゾーナルロータ14の構造について図2を参照して説明する。図1の断面図では、一般的なロータ3を図示しているが、図2に示すゾーナルロータ14は図1に示したロータ3を取り外して装着されるものである。ゾーナルロータ14は、椀形のロータボディ15と、ロータボディ15内に配設され、試料室16の内部を上方からみて扇形に分割するセプタ17と、ロータボディ15の上部を覆うカバー19から主に構成される。ロータボディ15の外周面には雄ねじ15aが形成され、この雌ねじがカバー19に形成された雌ねじ19aと螺合することによって、カバー19は試料室16を密閉する。カバー19の中心部には貫通穴が形成され、この貫通穴を通してシャフト18が配置される。
【0031】
シャフト18は円柱状に形成され、下端に形成される凹部18aはロータボディ15の内底面に形成された凸部15bに固定される。シャフト18の上端には、試料を出し入れするために用いられる回転シール20が取り付けられる。シャフト18には試料通路21と押出液通路22が備えられる。試料通路21は、シャフト18の上端に設けられた穴から下方向に延びてゾーナルロータ14の内部に位置する穴に通じる。押出液通路22はシャフト18の上端に設けられた穴から下方向に延びて、横方向に方向が変わった後にセプタ17に形成される貫通穴17aに接続される。貫通穴17aはゾーナルロータ14の径方向に貫通し、ゾーナルロータ14の外周付近であってセプタ17との間隙に通じる。
【0032】
ここで、ロータボディ15およびカバー19は、例えばチタン合金から加工される。これは高速回転による高い遠心応力に対応するためである。また、セプタ17は変性ポリフェニレンオキサイド樹脂であり、例えばノリル(商品名でありサビツク・イノベーテイブ・プラステイツクス・アイピー・ベー・ベー社の登録商標でもある)から加工できる。これは、ゾーナルロータ14の試料室16に試料が満たされた状態で高速運転すると、セプタ17に試料の液圧が加わるため変形が抑えられ、遠心応力が小さくなるためと、セプタ17の形状が複雑であるため、加工性の良い材料にしたためである。ロータボディ15の底部にはアダプタ10が設けられ、アダプタ10自体に磁性皮膜を設けて磁気記録媒体を形成し、これをロータ判別手段11に含まれる図示しない磁気ヘッドで読み出すようにすれば良い。このようにアダプタ10に情報を記録及び再生可能なように構成すれば、データの記録および再生を行うことができ、ロータの種類の判別や運転実績管理を記録させることができる。
【0033】
次に図3及び図4を参照して、ゾーナルロータ14の運転工程について説明する。初めに、遠心分離機の操作表示部12に表示されるZONALキーを選択する。そうすると、制御部13は、操作表示部12にゾーナル運転をするためのパスワードを入力するように表示し、ユーザがパスワードの入力を完了するのを待つ。パスワードの入力が終わると、制御部13は、ユーザ(操作者)がゾーナルロータで運転することを確実に認識したことを判別できる。
【0034】
試料注入の際は、ゾーナルロータ14が大気中で、低速回転(例えば3,000rpm)で回転している状態で、シャフト18の上部にシール部23を取り付けて、ゾーナルロータ14の回転シール20と接触、摺動させてメカニカルシールを構成する。次に、図示しない送液ポンプを使用して試料分離に必要な密度勾配液と分離する試料を注入する。シール部23は、ロータ室5に取り付けられたシール支持板24にゾーナルロータ14の回転軸心と一致するように調整されて取り付けられる。この後、押出液通路22と貫通穴17aを使って密度勾配液を注入した後、試料通路21から試料をゾーナルロータ14の中心部に注入する。
【0035】
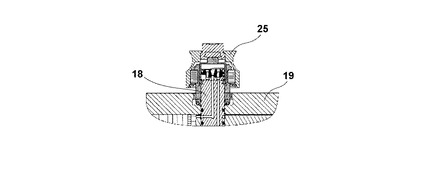
遠心分離の際は、シール部23を取りはずし、シャフト18の上端にゾーナルロータ14の内部を密封する目的でキャップ25を取り付ける。キャップ25は、シャフト18の上端部にOリング等によってシールされた状態で取り付けられる。試料を遠心分離するために高速回転する際には、ゾーナルロータ14にキャップ25を取り付けた状態でドア6(図1参照)を閉じる。そして、空気とゾーナルロータ14との摩擦による発熱を抑えるためにロータ室5を真空ポンプ8によって減圧し、十分に減圧した後にゾーナルロータ14を所定の高速回転(例えば35,000rpm)まで加速させ、試料の分離に適した時間の遠心分離を行う。
【0036】
設定された運転時間が終了した後の試料の回収では、ゾーナルロータ14を停止させずに減速して低速回転(例えば3,000rpm)で回転させ、ロータ室5を大気圧に戻すために電磁バルブ9を開放する。ロータ室5が大気圧になったらドア6を開け、キャップ25を取り外し、再びシール部23を取り付け、ゾーナルロータ14内の分離された液体を回収する。例えば、3,000rpmにおける試料回収の場合は、密度の大きい液体を図3に示すシャフト18の押出液通路22を介してゾーナルロータ14内の外壁側から送り込み、試料をシャフト18の試料通路21を介し、外へ排出させて回収を行う。
【0037】
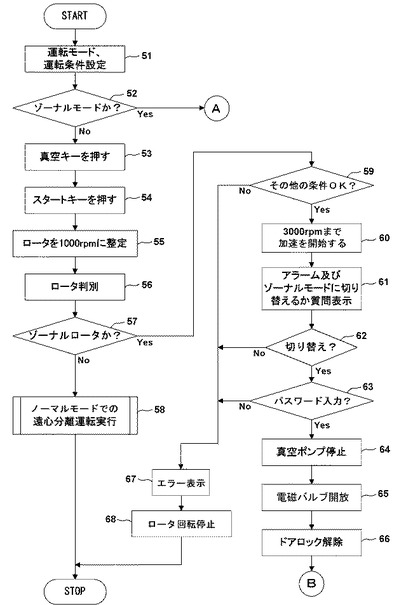
次に図5及び図6のフローチャートを用いて本実施例に係る遠心分離機の制御手順を説明する。図5及び図6に示すフローチャートは、制御部13に含まれる図示しないマイクロコンピュータによってコンピュータプログラムを実行することによりソフトウェア的に実現できる。まず、ユーザ(作業者)は適切なロータ3をロータ室5の内部にセットし、操作表示部12から運転モードや運転条件を設定する(ステップ51)。運転条件には、運転モードと、ロータ室5の設定温度、及び設定回転速度、遠心分離時間等が含まれる。運転モードは、複数のチューブをセットしたロータによって遠心分離を行う“ノーマルモード(通常運転モード)”とゾーナルロータを用いて遠心分離を行う“ゾーナルモード”が含まれる。
【0038】
運転モードの設定が終わると、制御部13はゾーナルモードか否かを判定する(ステップ52)。ゾーナルモードの場合は、矢印Aに示すように図6のフローチャートに移行する。ゾーナルモードでない場合は、ステップ53以降のノーマルモードによる遠心分離運転の制御に移行する。ノーマルモードにおいて、ユーザはロータ3への試料の設定が完了するとロータ室5を閉じているドア6を閉めて操作表示部12から真空キーを押す(ステップ53)。真空キーを押すと、ドアロック機構7によりドア6が開くことができないようにロックされ、制御部13からの指示により電磁バルブ9が閉じられる。これらの操作が完了したら、真空ポンプ8が起動してロータ室5が減圧される。なお、真空ポンプ8は、真空キーを押す前にスタートキーを押すことにより、同時に真空ポンプ8も起動させることができる。
【0039】
次に、ユーザが操作表示部12の図示しないスタートキーを押すと(ステップ54)、制御部13は駆動モータ4を起動させる。ロータ3は駆動モータ4により回転を始め、所定の回転速度(例えば1,000rpm)に整定する(ステップ55)。この整定の際に、ロータ判別手段11によってロータ3の種類が判別される(ステップ56)。本実施例においては、アダプタ10の外周の一部に磁性皮膜を設け、この磁性皮膜と対向する位置に、磁気ヘッドを配置することで、磁性皮膜に記憶させたデータをロータ判別手段11を介して制御部13が情報を読み込む。
【0040】
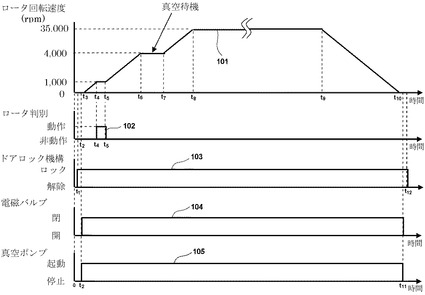
制御部13は、判別されたロータ3の情報から装着されているロータが、ゾーナルロータ14であるかを判定する(ステップ57)。装着されているロータがゾーナルロータ14でない場合は、ノーマルモードによる遠心分離手順が実行される(ステップ58)。このノーマルモードによる遠心分離手順は公知であるが、ここで図8を用いて、ノーマルモードにおける、ロータの回転速度、ロータ判別のタイミング、ドアロック機構の状態、電磁バルブ、真空ポンプの状態を説明する。
【0041】
図8において、横軸は時間(秒)であり、各グラフのスケールを合わせて表示している。図8において、ユーザが遠心分離機のスタートキーを押すと、103に示すように時間t1においてドアロック機構7がロック状態になり、104に示すように時間t2にて電磁バルブ9が閉鎖されるとともに105に示すように真空ポンプ8が起動する。その後、回転速度101に示すように時間t3にてロータ3の回転が開始する。
【0042】
次に時間t4にてロータ3の回転速度が1,000rpmに到達すると、102に示すようにロータ3の判別が行われる。時間t5にてロータ3の判別が完了すると、制御部13は駆動モータ4の回転を加速させて、時間t6にて真空待機回転速度、例えば4,000rpmにて整定させる。この真空待機回転速度は、ロータ室5の内部が所定の真空度まで減圧されるまで待機するためであって、時間t7にて所定の真空度にまで到達したら再びロータ3の回転が加速され、時間t8にて操作表示部12にて設定された遠心分離回転速度(例えば35,000rpm)に到達したら、設定された時間だけ遠心分離運転を行う。
【0043】
そして時間t9にて遠心分離運転が完了したら、ロータ3の回転が減速され時間t10にてロータ3が停止する。その後、時間t11にて真空ポンプ8の運転を停止させるための信号が入力されると、真空ポンプ8の運転を停止すると共に電磁バルブ9を開放する。この電磁バルブ9の開放によりロータ室5の内部に空気が送り込まれ、ロータ室5の圧力は大気圧となりドア6を開けることが可能な状態となる。その後、時間t12にてドアロック機構7も解除されるので、作業者はドア6を開けることができ、試料を取り出すことができる。
【0044】
次に、ゾーナルモードが選択された場合の状態を図9を用いて説明する。ゾーナルモードが選択されてスタートキーが押されると、回転速度111に示すように時間t3においてロータ3の回転が開始する。時間t4にてロータ3の回転速度が1,000rpmに到達すると、112に示すようにゾーナルロータ14の判別が行われる。時間t5にてゾーナルロータ14の判別が完了し正しいロータが装着されていると識別されると、制御部13は駆動モータ4の回転を加速させて、ゾーナルロータへの試料の注入が可能なように、時間t6にてゾーナル速度(試料注入・回収速度)、例えば3,000rpmにて整定させる。ゾーナルロータ14がゾーナル速度(試料注入・回収速度)で回転中にユーザは密度勾配液や試料等を注入し、時間t7にてドアを閉鎖する。すると113に示すようにドアロック機構7がロックされ、114に示すように時間t8にて電磁バルブ9が閉鎖され、115に示すように真空ポンプ8の運転を開始する。その後、ゾーナルロータ14を加速させて真空待機回転速度にて整定させる。時間t10にて所定の真空度にまで到達したら再びゾーナルロータ14の回転が加速され、時間t11にて操作表示部12から入力されたあらかじめ設定された遠心分離回転速度(例えば35,000rpm)に到達したら、設定された時間だけ遠心分離運転を行う。
【0045】
そして時間t12にて遠心分離運転が完了したら、ゾーナルロータ14の回転が減速され、ゾーナル速度(試料注入・回収速度)に整定したら時間t13にて真空ポンプ8の運転を停止させると共に電磁バルブ9を開放する。電磁バルブ9の開放によりロータ室5に空気が送り込まれ、ロータ室5の圧力は大気圧となりドア6を開けることが可能な状態となる。続いて時間t14にてドアロック機構7も解除され、作業者はドア6を開けて試料の取り出しを行う。時間t15にて試料の取り出しが完了したらゾーナルロータ14の回転が減速され、時間t16で停止する。
【0046】
以上、図8、9で示したのがノーマルモード及びゾーナルモードでの制御であるが、図5のステップ57でYESの場合のように、ノーマルモードが選択されたが、実際に装着されているロータがゾーナルロータ14である場合は(これはステップ51においてユーザが運転モードの選択を誤ったことを意味する)、異なる処理が必要になる。本実施例では、従来の遠心分離機の制御に加えて、ステップ57及び59〜68の処理を追加し、ノーマルモードからゾーナルモードへの自動切り替え手順の処理を実行可能に構成した。
【0047】
図5に戻りステップ57でYESの場合は、制御部13はノーマルモードからゾーナルモードへの自動切り替えを行うにあたって、設定されたロータ室5の設定温度、設定回転速度、遠心分離時間等の運転条件が、装着されたゾーナルロータ14に対して適した条件かを判定する(ステップ59)。例えば、ステップ51で設定された運転条件が、装着されているゾーナルロータ14の条件に適しているかである。ここで、設定条件がOKでない場合、例えばゾーナルロータ14の最高回転速度を超えた遠心分離回転速度が設定されている場合は、その旨のエラー表示をして(ステップ67)、ゾーナルロータ14の回転を停止させて処理を終了する(ステップ68)。
【0048】
ステップ59において、その他の条件がOKの場合は、試料を注入すべくゾーナルロータ14を所定の回転速度、例えば3000rpmまで加速させる(ステップ60)。次に、アラーム音を鳴らしてユーザに注意を喚起すると共に、操作表示部12に「ゾーナルロータが装着されています。ゾーナルモードでの運転に切り替えますか?(YES/NO)」とのメッセージを表示する(ステップ61)。ここでステップ62において、ユーザが操作表示部12からNOを選択してゾーナルモードでの運転に切り替えを希望しない場合は、「運転がキャンセルされました。停止します」とのエラー表示をして(ステップ67)、ゾーナルロータ14の回転を停止させて処理を終了する(ステップ68)。
【0049】
次に、ステップ62で、YESが選択された場合は、制御部13は、操作表示部12にゾーナル運転をするためのパスワードを入力するように表示し、ユーザがパスワードの入力を完了するのを待つ(ステップ63)。正しいパスワードの入力が終わると、遠心分離機1の制御部13は、ユーザ(操作者)がゾーナルロータで運転することを認識したことを確認でき、稼働した真空ポンプ8を停止させる(ステップ64)。次に制御部13は、電磁バルブ9を開放してロータ室5の内部を大気圧にし(ステップ65)、ドアロック機構7を解除し(ステップ66)、図6に示すフローチャートのB地点(ステップ72)に進む。
【0050】
ステップ63にてパスワードが一致しない場合、又は、キャンセルキーが選択されてパスワードの入力が成されなかった場合は、「パスワードが入力されていません。処理を終了します」とのエラー表示をして(ステップ67)、ゾーナルロータ14の回転を停止させて処理を終了する(ステップ68)。
【0051】
ここで図7を用いて、ノーマルモードが選択されたが、装着されているのがゾーナルロータ14であった場合の制御を説明する。ユーザがスタートキーを押すと、93aに示すように時間t1においてドアロック機構7がロック状態になり、94a及び95aに示すように時間t2にて電磁バルブ9が閉鎖されるとともに真空ポンプ8が起動する。その後、回転速度91に示すように時間t3にてロータ3の回転が開始する。
【0052】
次に時間t4にてロータ3の回転速度が1,000rpmに到達すると、92に示すようにロータ3の判別が行われる。ここで装着されているロータがゾーナルロータ14の場合は、制御部13はゾーナルロータ14をゾーナル速度(試料注入・回収速度)、例えば3,000rpmに加速させながら、操作表示部12にアラーム及び遠心分離機の運転モードをゾーナルモードに変更するか運転を中断させるか選択させる。ここでユーザによってゾーナルモードに変更するとの指示を受け、ゾーナルモードに切替えためのパスワードが入力されたら、時間t6において制御部13は真空ポンプ8を停止させて、電磁バルブ9を開放し、時間t7においてドアロック機構7によるロックを解除する。尚、真空ポンプ8の停止→電磁バルブ9の開放→ドアロック機構7の解除は、この順序で行うのが好ましいが、ゾーナル速度(試料注入・回収速度)に到達する前に時間t5の時点でこれらをすぐに行うようにしても良い。このように一旦稼働させた真空ポンプ8を停止させるのは、ゾーナルロータ14への試料注入時にはドア6を開ける必要があり、ロータ室5が大気圧になるからである。時間t5において、ゾーナル速度(試料注入・回収速度、例えば3,000rpm)までゾーナルロータ14を加速させるまえに、操作表示部12にアラーム及び遠心分離機の運転モードをゾーナルモードに変更するかを表示して、ユーザの入力を受けるようにしても良い。
【0053】
時間t8においてゾーナルロータ14への試料の注入が完了し、ユーザによるゾーナルロータへの試料注入完了が入力(スタートキーON)されたら、93bに示すように時間t8にて制御部13はドアロック機構7をロックし、その後、94b及び95bに示すように時間t9にて電磁バルブ9を閉鎖して真空ポンプ8を起動する。以降の手順は、図9で説明した時間t7以降の手順と同じであるので、繰り返しの説明を省略する。
【0054】
図6はゾーナルモードにおける遠心分離機の制御手順を示すフローチャートである。ゾーナルモードは、ユーザによるスタートキーを押下することにより開始されるが(ステップ71)、図5のステップ57、59〜66の処理を経た場合は、ステップ62に対する質問へのYESとの回答がスタートキーの代わりとなる。
【0055】
スタートキーが押下されたら、制御部13は駆動モータ4を起動させてゾーナルロータ14を回転し始め、所定の回転速度(例えば1,000rpm)に整定させてロータの種類の判別を行う。判別が終了したら第1の低速の回転速度(例えば3,000rpm)までゾーナルロータ14を加速して整定させる(ステップ72)。このとき、電磁バルブ9は開放状態、ドアロック機構7は解除状態、真空ポンプ8は停止した状態であり、ドア6は開閉自在である。ユーザはこのときにゾーナルロータ14に試料を注入する(ステップ73)。試料の注入後、ドア6を閉じ操作表示部12よりゾーナルロータへの試料注入完了(スタートキーON)を指示すると、制御部13はドアロック機構7によりドア6をロックし電磁バルブ9を閉じ(ステップ74)、ロータ室5は真空ポンプ8により減圧される(ステップ75)。
【0056】
次に、駆動モータ4は所定の低速回転速度から、あらかじめ設定した高速の回転速度(例えば35,000rpm)まで加速し(ステップ76)、設定回転速度で整定し、ゾーナルモードでの所定の時間の遠心分離が行われる(ステップ77)。この設定回転速度での回転によってゾーナルロータ14内部の試料は分離される。
【0057】
設定された時間の遠心分離運転が終了したら(ステップ78)、ゾーナルロータ14は減速されて試料注入時と同じ低速の回転速度、例えば3,000rpmに整定される(ステップ79)。次に、制御部13は真空ポンプ8を停止させ(ステップ80)、電磁バルブ9を開放する(ステップ81)。この制御によってロータ室5の圧力は大気圧となり、ドア6を開くことができるので、制御部13はドアロック機構7(ステップ82)を解除する。この状態でユーザは図3で示したようにシャフト18の上部にシール部23を取り付けて、ゾーナルロータ14の回転シール20と接触、摺動させてメカニカルシールを構成する。次に、図示しない送液ポンプを使用して分離された試料を回収する(ステップ83)。試料の回収後に、ユーザが操作表示部12から試料の回収完了の指示を操作することにより制御部13はゾーナルロータ14の回転を停止させる(ステップ85)。
【0058】
以上説明したように、本実施例の制御により、ユーザが操作ミスにより試料が注入されていないゾーナルロータをノーマルモードで運転してしまっても、高速回転させる前に制御部13が設定誤りを認識して高速回転を阻止することができ、ゾーナルロータ内のセプタの破損や短寿命化を防止することができる。また、上記制御はゾーナルロータ装着時であって運転モードの設定ミスによりノーマルモードで使用した場合にのみ実行されるので、通常の遠心分離運転での動作や処理には何ら影響を与えない。さらに、運転モードの設定ミスをした場合でも迅速に正しい運転モードでの遠心分離運転の再開ができるので、使いやすい遠心分離機を実現できると共にユーザの操作負担を最小限にすることができる。
【0059】
以上、本発明を実施例に基づいて説明したが、本発明は上述の実施例に限定されるものではなく、その趣旨を逸脱しない範囲内で種々の変更が可能である。
【符号の説明】
【0060】
1 遠心分離機 2 筐体 3 ロータ 4 駆動モータ
5 ロータ室 6 ドア 7 ドアロック機構
8 真空ポンプ 9 電磁バルブ 10 アダプタ
11 ロータ判別手段 12 操作表示部 13 制御部
14 ゾーナルロータ 15 ロータボディ
15b (ロータボディの)凸部 16 試料室 17 セプタ
17a (セプタの)貫通穴 18 シャフト
18a (シャフトの)凹部 19 カバー 20 回転シール
21 試料通路 22 押出液通路 23 シール部
24 シール支持板 25 キャップ
【技術分野】
【0001】
本発明はゾーナルロータを使用する遠心分離機に関し、特にゾーナルロータに試料を注入しない状態で誤って高速回転させてしまうことを防止することができる遠心分離機に関する。
【背景技術】
【0002】
遠心分離機を使った遠心分離法の一つとしてゾーナル遠心法が知られている。ゾーナル遠心法は密度勾配液と試料を遠心して、試料中に含まれる物質を大きさや重さに応じて分離分画する方法で、例えば生物学、医学、農学等の分野で細胞内物質やウイルス等の微小粒子の分離に使用される。
【0003】
実験室的には、スイングロータに試料を注入したプラスチック製試験管をロータのバケットに挿入して回転するものが使用されるが、より大容量形としてゾーナルロータ(Zonal Rotor)と呼ばれる製品が、販売、使用されている。例えば、出願人によってP35ZT形ゾーナルロータが製造及び販売されている。これらのゾーナルロータは、スイングロータに比べ、“WALL EFFECT”がないため試料の乱れが少ないこと、容量が大きいこと、試料の注入、回収、分析操作が回転中に連続的に行える等の特長を有しており、主にワクチン製造などの大容量、高精度が要求される分離に広く使用されている。
【0004】
ゾーナルロータを使用したゾーナル遠心分離法は、低速回転で整定させたゾーナルロータ中に、遠心力の方向にしだいに濃くなる密度勾配液を作成し、試料を注入して所定の高速回転で分離後に低速回転に再び整定させ、更に密度が大きい液体を注入し試料を回収する方法である。ここで、試料を注入および回収する時の回転速度は3,000rpm程度とされる。
【0005】
遠心分離機でゾーナルロータを使用して運転する場合、ドアを開けた状態で回転中に試料の注入および回収を行うため、一般的なロータの使用方法と大きく異なる。そのため、ゾーナルロータを使用する遠心分離機は、ゾーナルロータの運転用に専用の運転モードであるゾーナルモードに切り替えられるようになっている。
【0006】
遠心分離機は特許文献1に示されるように、ロータに磁性皮膜を備えた磁気記録媒体を設け、磁気ヘッドでデータの記録および再生を行い、ロータの種類の判別や運転実績管理を記録させる方法が提案されている。また、下記特許文献2に示されるように、ロータの底部に円周上に配置された複数のマグネットの角度からロータの種類を判別し、ロータの過回転を防止させる方法が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平3−181347号公報
【特許文献2】特開平8−108098号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述した遠心分離機では、ゾーナルロータを装着したまま誤って通常モードで運転を開始させてしまうと、あらかじめ設定した高速回転速度まで加速してしまい、低速(例えば3,000rpm)の回転速度で試料の注入が行えないことになる。さらに、ゾーナルロータ内に試料が無い状態で、高速の設定回転速度で回転させることになるので、ゾーナルロータ内に配置されるセプタに試料の液圧が加わらず、セプタへ大きな遠心応力が加わってしまい、セプタが短寿命となる問題があった。
【0009】
上記問題を解決するために、通常モードでロータを運転する場合にもゾーナルモードでの制御と同様に低速の回転速度で一旦整定させる方法が考えられるが、使い勝手が悪くなる問題があった。また、ロータの回転加速時間から試料の有無を判断して、試料が入っていないと判断された場合にのみ低速の回転速度で一旦整定させる方法が考えられるが、同じような慣性モーメントの他のロータを装着した場合も一旦停止させてしまう恐れがあり、使い勝手が悪くなる問題があった。
【0010】
本発明は上記背景に鑑みてなされたもので、その目的は、ゾーナルモードと通常モードの設定ミスを効果的に検出して、ロータを高速回転させる前にユーザに通知するようにした遠心分離機を提供することにある。
【0011】
本発明の他の目的は、ゾーナルロータのセプタを短寿命にすること無く、信頼性を高めた遠心分離機を提供することである。
【0012】
本発明のさらに他の目的は、ユーザが運転モードの設定を誤った場合でも、迅速にリカバリーして正しい運転モード(ゾーナルモード)での運転を再開することができる遠心分離機を提供することにある。
【課題を解決するための手段】
【0013】
本願において開示される発明のうち代表的なものの特徴を説明すれば次の通りである。
【0014】
本発明の一つの特徴によれば、分離する試料を保持するロータと、ロータを収納するロータ室と、ロータ室内を封じるドアと、ロータを回転させるモータと、モータの回転を制御する制御部と有し、ロータの回転開始前に試料を注入しておく通常運転モードと、ロータの回転中に試料を注入するゾーナルモードを有する遠心分離機において、制御部は、通常運転モードを開始した後に装着されているロータの種類を判別し、ロータがゾーナルモード用のロータであると判別された場合にはゾーナルモードへの切り替えを自動で行うようにした。通常モードを運転し、ロータ判別手段で判別されたロータの種類がゾーナルロータであった場合は、制御部が異常と判断してその後の処理を行う。
【0015】
本発明の他の特徴によれば、ゾーナルモードにおいては、試料を注入するためにロータを5,000rpm以下の第一の回転速度に整定し、試料を注入後にロータを5,000rpm以上の設定回転速度に加速させる。ロータには固有情報を示す手段が設けられ、遠心分離機には固有情報を読み取るためのロータ判別手段が設けられ、ロータ判別手段は、ロータの回転が開始した直後に固有情報を読み出すようにした。また遠心分離機に表示部を設け、通常運転モードを開始した後に装着されているロータがゾーナルモード用のロータであると判別された場合に、制御部はゾーナルモードへの切り替えが可能であるかを判定し、可能の場合はゾーナルモードへの切り替えを行うか否かの問い合わせ表示(ダイアログ表示)を行い、不可能な場合はエラーメッセージを表示してロータの回転を停止させるように構成した。
【0016】
本発明のさらに他の特徴によれば、ロータを第一の回転速度に整定させた際に、制御部がゾーナルロータへ試料注入の有無を確認するための確認画面を表示部へ表示する。遠心分離機には、ロータ室を減圧する減圧装置と、ロータ室の減圧状態を解除するバルブを設け、通常運転モードを開始した後にロータがゾーナルモード用のロータであると判別された場合には減圧装置の運転を停止してバルブを開放し、ロータ室を大気圧とする。減圧装置により所定の真空度に到達するまで低速回転で待機する第二の回転速度を設定し、第一の回転速度は第二の回転速度よりも低く設定した。
【発明の効果】
【0017】
請求項1の発明によれば、ユーザの使い勝手を悪化させること無く、ゾーナルロータのセプタの短寿命を防止した品質の高い遠心分離機を提供することができる。また、判別されたロータがゾーナルロータであった場合は、制御部が特別な処理を実行してその後の処理を行うことでセプタの短寿命を防止することができる。更にゾーナルロータを使用した場合にのみ特別な処理を行うため、ユーザの操作負担を最小限にすることができる。
【0018】
請求項2の発明によれば、試料を注入するためにロータを5,000rpm以下の第一の回転速度に整定し、試料を注入後にロータを5,000rpm以上の設定回転速度に加速させるので、ゾーナルロータ内のセプタの遠心応力を抑えることでセプタの短寿命を防止することができる。
【0019】
請求項3の発明によれば、ロータ判別手段は、ロータの回転が開始した直後に固有情報を読み出すので、制御部は設定された運転モードと装着されたロータの種類が一致するかを確実に判別することができる。
【0020】
請求項4の発明によれば、制御部はゾーナルモードへの切り替えが可能であるかを判定し、可能の場合はゾーナルモードへの切り替えを行うか否かのダイアログ表示を行うのでユーザに試料注入を行うかどうかの確認を行うことができる。また、ゾーナルモードへの切り替えが不可能な場合はエラーメッセージを表示してロータの回転を停止させるので、ゾーナルロータ内のセプタに過大な遠心応力がかかることを防止でき、セプタの短寿命化を阻止することができる。
【0021】
請求項5の発明によれば、ロータを第一の回転速度に整定させた際に、制御部がゾーナルロータへ試料注入の有無を確認するための確認画面を表示部へ表示するので、信頼性を高めることができるとともに、ロータの装着誤りの場合にユーザは即座にロータの回転を停止させることができる。
【0022】
請求項6の発明によれば、通常運転モードを開始した後にロータがゾーナルモード用のロータであると判別された場合には減圧装置の運転を停止してバルブを開放し、ロータ室を大気圧とするので、試料注入のための事前準備を制御部が自動で行うことができ、ユーザによる操作を減らすことができる。また、試料注入に至る操作時間の短縮を図ることができる。
【0023】
請求項7の発明によれば、減圧装置により所定の真空度に到達するまで低速回転で待機する第二の回転速度を設定し、第一の回転速度は第二の回転速度よりも低く設定したので、所定の真空度に到達するまで待機速度に影響されずに、試料の注入に適した任意の回転速度を設定することができる。
【0024】
本発明の上記及び他の目的ならびに新規な特徴は、以下の明細書の記載及び図面から明らかになるであろう。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例に係る遠心分離機の全体構成を示す断面図である。
【図2】本発明の実施例に係る遠心分離機のゾーナルロータの断面図である。
【図3】本発明の実施例に係るゾーナルロータへの試料注入/回収時のゾーナルロータの断面図である。
【図4】本発明の実施例に係る遠心分離機の遠心分離運転状態におけるゾーナルロータの部分断面図である。
【図5】本発明の実施例に係る遠心分離機の制御手順を示すフローチャートである(その1)。
【図6】本発明の実施例に係る遠心分離機の制御手順を示すフローチャートである(その2)。
【図7】遠心分離機のノーマルモードにおける各部の動作を示したタイムチャートである。
【図8】遠心分離機のゾーナルモードにおける各部の動作を示したタイムチャートである。
【図9】本発明の実施例に係る遠心分離機においてノーマルモードからゾーナルモードに変更される際の各部の動作を示したタイムチャートである。
【発明を実施するための形態】
【実施例1】
【0026】
以下、本発明の実施例を図面に基づいて説明する。なお、以下の図において、同一の部分には同一の符号を付し、繰り返しの説明は省略する。また、本明細書においては、前後、上下の方向は図1に示す方向であるとして説明する。
【0027】
図1は本発明の実施例に係る遠心分離機の全体構成を示す断面図である。遠心分離機1は、上面から見た断面形状が略四角形を有する筐体2を備え、筐体2の内部には、分離する試料を保持するためのロータ3と、ロータ3に回転駆動力を与えるための駆動モータ4と、ロータ3を収納するロータ室5とを有し、また、筐体2内に形成されたロータ室5の上部開口部(開閉部)には、スライド式のドア6が筐体2に対し開閉自在に取付けられる。ドア6の近傍にはドアロック機構7が設けられ、ロータが回転中はドア6が開かないようにロックする。また、筐体2には運転条件の設定や運転操作、ゾーナルモードの切り替え操作と回転速度などの運転状況を表示させる操作表示部12が設けられる。ロータ室5には真空ポンプ8が接続されている。尚、本実施例では真空ポンプを油回転真空ポンプだけで構成しているが、ロータ室5と油回転真空ポンプの間に、さらに油拡散真空ポンプ(図示せず)を配置しても良く、一種類もしくは複数の真空ポンプの組合せた真空ポンプ8によりロータ室5を減圧しても良い。ロータ室5を減圧するのはロータ3が高速回転したときにロータ室5の内部の空気とロータ3との風損(摩擦熱)の発生を抑制するためである。
【0028】
ロータ室5には外部からの空気の流入を遮断する電磁バルブ9が設けられ、運転終了時には電磁バルブ9を開くことで減圧されたロータ室5内部へ空気を送り込みロータ室5の内部を大気圧にする。ロータ3は底部にアダプタ10が設けられ、アダプタ10はロータの種類を識別するための情報を有する。例えば、アダプタ10の外周の一部に磁性皮膜を設け、この磁性皮膜と対向する位置にロータ判別手段11(磁気ヘッド)を配置することで、磁性皮膜に記憶させたデータをロータ判別手段11を介して読み取ることができる。別の方法として、アダプタ10に複数のマグネットを配置し、磁気検出手段等のロータ判別手段11によってマグネットの配置によって示される情報を読み取ることができる。
【0029】
制御部13は、図示しないマイクロコンピュータを含み、駆動モータ4の回転制御、真空ポンプ8の運転・停止制御、ドアロック機構7の制御、ロータ判別手段11によるロータ3の判別、操作表示部12への情報の表示と入力データの取得、電磁バルブ9の開閉等、遠心分離機1の全体制御を行う。
【0030】
次に、ゾーナルロータ14の構造について図2を参照して説明する。図1の断面図では、一般的なロータ3を図示しているが、図2に示すゾーナルロータ14は図1に示したロータ3を取り外して装着されるものである。ゾーナルロータ14は、椀形のロータボディ15と、ロータボディ15内に配設され、試料室16の内部を上方からみて扇形に分割するセプタ17と、ロータボディ15の上部を覆うカバー19から主に構成される。ロータボディ15の外周面には雄ねじ15aが形成され、この雌ねじがカバー19に形成された雌ねじ19aと螺合することによって、カバー19は試料室16を密閉する。カバー19の中心部には貫通穴が形成され、この貫通穴を通してシャフト18が配置される。
【0031】
シャフト18は円柱状に形成され、下端に形成される凹部18aはロータボディ15の内底面に形成された凸部15bに固定される。シャフト18の上端には、試料を出し入れするために用いられる回転シール20が取り付けられる。シャフト18には試料通路21と押出液通路22が備えられる。試料通路21は、シャフト18の上端に設けられた穴から下方向に延びてゾーナルロータ14の内部に位置する穴に通じる。押出液通路22はシャフト18の上端に設けられた穴から下方向に延びて、横方向に方向が変わった後にセプタ17に形成される貫通穴17aに接続される。貫通穴17aはゾーナルロータ14の径方向に貫通し、ゾーナルロータ14の外周付近であってセプタ17との間隙に通じる。
【0032】
ここで、ロータボディ15およびカバー19は、例えばチタン合金から加工される。これは高速回転による高い遠心応力に対応するためである。また、セプタ17は変性ポリフェニレンオキサイド樹脂であり、例えばノリル(商品名でありサビツク・イノベーテイブ・プラステイツクス・アイピー・ベー・ベー社の登録商標でもある)から加工できる。これは、ゾーナルロータ14の試料室16に試料が満たされた状態で高速運転すると、セプタ17に試料の液圧が加わるため変形が抑えられ、遠心応力が小さくなるためと、セプタ17の形状が複雑であるため、加工性の良い材料にしたためである。ロータボディ15の底部にはアダプタ10が設けられ、アダプタ10自体に磁性皮膜を設けて磁気記録媒体を形成し、これをロータ判別手段11に含まれる図示しない磁気ヘッドで読み出すようにすれば良い。このようにアダプタ10に情報を記録及び再生可能なように構成すれば、データの記録および再生を行うことができ、ロータの種類の判別や運転実績管理を記録させることができる。
【0033】
次に図3及び図4を参照して、ゾーナルロータ14の運転工程について説明する。初めに、遠心分離機の操作表示部12に表示されるZONALキーを選択する。そうすると、制御部13は、操作表示部12にゾーナル運転をするためのパスワードを入力するように表示し、ユーザがパスワードの入力を完了するのを待つ。パスワードの入力が終わると、制御部13は、ユーザ(操作者)がゾーナルロータで運転することを確実に認識したことを判別できる。
【0034】
試料注入の際は、ゾーナルロータ14が大気中で、低速回転(例えば3,000rpm)で回転している状態で、シャフト18の上部にシール部23を取り付けて、ゾーナルロータ14の回転シール20と接触、摺動させてメカニカルシールを構成する。次に、図示しない送液ポンプを使用して試料分離に必要な密度勾配液と分離する試料を注入する。シール部23は、ロータ室5に取り付けられたシール支持板24にゾーナルロータ14の回転軸心と一致するように調整されて取り付けられる。この後、押出液通路22と貫通穴17aを使って密度勾配液を注入した後、試料通路21から試料をゾーナルロータ14の中心部に注入する。
【0035】
遠心分離の際は、シール部23を取りはずし、シャフト18の上端にゾーナルロータ14の内部を密封する目的でキャップ25を取り付ける。キャップ25は、シャフト18の上端部にOリング等によってシールされた状態で取り付けられる。試料を遠心分離するために高速回転する際には、ゾーナルロータ14にキャップ25を取り付けた状態でドア6(図1参照)を閉じる。そして、空気とゾーナルロータ14との摩擦による発熱を抑えるためにロータ室5を真空ポンプ8によって減圧し、十分に減圧した後にゾーナルロータ14を所定の高速回転(例えば35,000rpm)まで加速させ、試料の分離に適した時間の遠心分離を行う。
【0036】
設定された運転時間が終了した後の試料の回収では、ゾーナルロータ14を停止させずに減速して低速回転(例えば3,000rpm)で回転させ、ロータ室5を大気圧に戻すために電磁バルブ9を開放する。ロータ室5が大気圧になったらドア6を開け、キャップ25を取り外し、再びシール部23を取り付け、ゾーナルロータ14内の分離された液体を回収する。例えば、3,000rpmにおける試料回収の場合は、密度の大きい液体を図3に示すシャフト18の押出液通路22を介してゾーナルロータ14内の外壁側から送り込み、試料をシャフト18の試料通路21を介し、外へ排出させて回収を行う。
【0037】
次に図5及び図6のフローチャートを用いて本実施例に係る遠心分離機の制御手順を説明する。図5及び図6に示すフローチャートは、制御部13に含まれる図示しないマイクロコンピュータによってコンピュータプログラムを実行することによりソフトウェア的に実現できる。まず、ユーザ(作業者)は適切なロータ3をロータ室5の内部にセットし、操作表示部12から運転モードや運転条件を設定する(ステップ51)。運転条件には、運転モードと、ロータ室5の設定温度、及び設定回転速度、遠心分離時間等が含まれる。運転モードは、複数のチューブをセットしたロータによって遠心分離を行う“ノーマルモード(通常運転モード)”とゾーナルロータを用いて遠心分離を行う“ゾーナルモード”が含まれる。
【0038】
運転モードの設定が終わると、制御部13はゾーナルモードか否かを判定する(ステップ52)。ゾーナルモードの場合は、矢印Aに示すように図6のフローチャートに移行する。ゾーナルモードでない場合は、ステップ53以降のノーマルモードによる遠心分離運転の制御に移行する。ノーマルモードにおいて、ユーザはロータ3への試料の設定が完了するとロータ室5を閉じているドア6を閉めて操作表示部12から真空キーを押す(ステップ53)。真空キーを押すと、ドアロック機構7によりドア6が開くことができないようにロックされ、制御部13からの指示により電磁バルブ9が閉じられる。これらの操作が完了したら、真空ポンプ8が起動してロータ室5が減圧される。なお、真空ポンプ8は、真空キーを押す前にスタートキーを押すことにより、同時に真空ポンプ8も起動させることができる。
【0039】
次に、ユーザが操作表示部12の図示しないスタートキーを押すと(ステップ54)、制御部13は駆動モータ4を起動させる。ロータ3は駆動モータ4により回転を始め、所定の回転速度(例えば1,000rpm)に整定する(ステップ55)。この整定の際に、ロータ判別手段11によってロータ3の種類が判別される(ステップ56)。本実施例においては、アダプタ10の外周の一部に磁性皮膜を設け、この磁性皮膜と対向する位置に、磁気ヘッドを配置することで、磁性皮膜に記憶させたデータをロータ判別手段11を介して制御部13が情報を読み込む。
【0040】
制御部13は、判別されたロータ3の情報から装着されているロータが、ゾーナルロータ14であるかを判定する(ステップ57)。装着されているロータがゾーナルロータ14でない場合は、ノーマルモードによる遠心分離手順が実行される(ステップ58)。このノーマルモードによる遠心分離手順は公知であるが、ここで図8を用いて、ノーマルモードにおける、ロータの回転速度、ロータ判別のタイミング、ドアロック機構の状態、電磁バルブ、真空ポンプの状態を説明する。
【0041】
図8において、横軸は時間(秒)であり、各グラフのスケールを合わせて表示している。図8において、ユーザが遠心分離機のスタートキーを押すと、103に示すように時間t1においてドアロック機構7がロック状態になり、104に示すように時間t2にて電磁バルブ9が閉鎖されるとともに105に示すように真空ポンプ8が起動する。その後、回転速度101に示すように時間t3にてロータ3の回転が開始する。
【0042】
次に時間t4にてロータ3の回転速度が1,000rpmに到達すると、102に示すようにロータ3の判別が行われる。時間t5にてロータ3の判別が完了すると、制御部13は駆動モータ4の回転を加速させて、時間t6にて真空待機回転速度、例えば4,000rpmにて整定させる。この真空待機回転速度は、ロータ室5の内部が所定の真空度まで減圧されるまで待機するためであって、時間t7にて所定の真空度にまで到達したら再びロータ3の回転が加速され、時間t8にて操作表示部12にて設定された遠心分離回転速度(例えば35,000rpm)に到達したら、設定された時間だけ遠心分離運転を行う。
【0043】
そして時間t9にて遠心分離運転が完了したら、ロータ3の回転が減速され時間t10にてロータ3が停止する。その後、時間t11にて真空ポンプ8の運転を停止させるための信号が入力されると、真空ポンプ8の運転を停止すると共に電磁バルブ9を開放する。この電磁バルブ9の開放によりロータ室5の内部に空気が送り込まれ、ロータ室5の圧力は大気圧となりドア6を開けることが可能な状態となる。その後、時間t12にてドアロック機構7も解除されるので、作業者はドア6を開けることができ、試料を取り出すことができる。
【0044】
次に、ゾーナルモードが選択された場合の状態を図9を用いて説明する。ゾーナルモードが選択されてスタートキーが押されると、回転速度111に示すように時間t3においてロータ3の回転が開始する。時間t4にてロータ3の回転速度が1,000rpmに到達すると、112に示すようにゾーナルロータ14の判別が行われる。時間t5にてゾーナルロータ14の判別が完了し正しいロータが装着されていると識別されると、制御部13は駆動モータ4の回転を加速させて、ゾーナルロータへの試料の注入が可能なように、時間t6にてゾーナル速度(試料注入・回収速度)、例えば3,000rpmにて整定させる。ゾーナルロータ14がゾーナル速度(試料注入・回収速度)で回転中にユーザは密度勾配液や試料等を注入し、時間t7にてドアを閉鎖する。すると113に示すようにドアロック機構7がロックされ、114に示すように時間t8にて電磁バルブ9が閉鎖され、115に示すように真空ポンプ8の運転を開始する。その後、ゾーナルロータ14を加速させて真空待機回転速度にて整定させる。時間t10にて所定の真空度にまで到達したら再びゾーナルロータ14の回転が加速され、時間t11にて操作表示部12から入力されたあらかじめ設定された遠心分離回転速度(例えば35,000rpm)に到達したら、設定された時間だけ遠心分離運転を行う。
【0045】
そして時間t12にて遠心分離運転が完了したら、ゾーナルロータ14の回転が減速され、ゾーナル速度(試料注入・回収速度)に整定したら時間t13にて真空ポンプ8の運転を停止させると共に電磁バルブ9を開放する。電磁バルブ9の開放によりロータ室5に空気が送り込まれ、ロータ室5の圧力は大気圧となりドア6を開けることが可能な状態となる。続いて時間t14にてドアロック機構7も解除され、作業者はドア6を開けて試料の取り出しを行う。時間t15にて試料の取り出しが完了したらゾーナルロータ14の回転が減速され、時間t16で停止する。
【0046】
以上、図8、9で示したのがノーマルモード及びゾーナルモードでの制御であるが、図5のステップ57でYESの場合のように、ノーマルモードが選択されたが、実際に装着されているロータがゾーナルロータ14である場合は(これはステップ51においてユーザが運転モードの選択を誤ったことを意味する)、異なる処理が必要になる。本実施例では、従来の遠心分離機の制御に加えて、ステップ57及び59〜68の処理を追加し、ノーマルモードからゾーナルモードへの自動切り替え手順の処理を実行可能に構成した。
【0047】
図5に戻りステップ57でYESの場合は、制御部13はノーマルモードからゾーナルモードへの自動切り替えを行うにあたって、設定されたロータ室5の設定温度、設定回転速度、遠心分離時間等の運転条件が、装着されたゾーナルロータ14に対して適した条件かを判定する(ステップ59)。例えば、ステップ51で設定された運転条件が、装着されているゾーナルロータ14の条件に適しているかである。ここで、設定条件がOKでない場合、例えばゾーナルロータ14の最高回転速度を超えた遠心分離回転速度が設定されている場合は、その旨のエラー表示をして(ステップ67)、ゾーナルロータ14の回転を停止させて処理を終了する(ステップ68)。
【0048】
ステップ59において、その他の条件がOKの場合は、試料を注入すべくゾーナルロータ14を所定の回転速度、例えば3000rpmまで加速させる(ステップ60)。次に、アラーム音を鳴らしてユーザに注意を喚起すると共に、操作表示部12に「ゾーナルロータが装着されています。ゾーナルモードでの運転に切り替えますか?(YES/NO)」とのメッセージを表示する(ステップ61)。ここでステップ62において、ユーザが操作表示部12からNOを選択してゾーナルモードでの運転に切り替えを希望しない場合は、「運転がキャンセルされました。停止します」とのエラー表示をして(ステップ67)、ゾーナルロータ14の回転を停止させて処理を終了する(ステップ68)。
【0049】
次に、ステップ62で、YESが選択された場合は、制御部13は、操作表示部12にゾーナル運転をするためのパスワードを入力するように表示し、ユーザがパスワードの入力を完了するのを待つ(ステップ63)。正しいパスワードの入力が終わると、遠心分離機1の制御部13は、ユーザ(操作者)がゾーナルロータで運転することを認識したことを確認でき、稼働した真空ポンプ8を停止させる(ステップ64)。次に制御部13は、電磁バルブ9を開放してロータ室5の内部を大気圧にし(ステップ65)、ドアロック機構7を解除し(ステップ66)、図6に示すフローチャートのB地点(ステップ72)に進む。
【0050】
ステップ63にてパスワードが一致しない場合、又は、キャンセルキーが選択されてパスワードの入力が成されなかった場合は、「パスワードが入力されていません。処理を終了します」とのエラー表示をして(ステップ67)、ゾーナルロータ14の回転を停止させて処理を終了する(ステップ68)。
【0051】
ここで図7を用いて、ノーマルモードが選択されたが、装着されているのがゾーナルロータ14であった場合の制御を説明する。ユーザがスタートキーを押すと、93aに示すように時間t1においてドアロック機構7がロック状態になり、94a及び95aに示すように時間t2にて電磁バルブ9が閉鎖されるとともに真空ポンプ8が起動する。その後、回転速度91に示すように時間t3にてロータ3の回転が開始する。
【0052】
次に時間t4にてロータ3の回転速度が1,000rpmに到達すると、92に示すようにロータ3の判別が行われる。ここで装着されているロータがゾーナルロータ14の場合は、制御部13はゾーナルロータ14をゾーナル速度(試料注入・回収速度)、例えば3,000rpmに加速させながら、操作表示部12にアラーム及び遠心分離機の運転モードをゾーナルモードに変更するか運転を中断させるか選択させる。ここでユーザによってゾーナルモードに変更するとの指示を受け、ゾーナルモードに切替えためのパスワードが入力されたら、時間t6において制御部13は真空ポンプ8を停止させて、電磁バルブ9を開放し、時間t7においてドアロック機構7によるロックを解除する。尚、真空ポンプ8の停止→電磁バルブ9の開放→ドアロック機構7の解除は、この順序で行うのが好ましいが、ゾーナル速度(試料注入・回収速度)に到達する前に時間t5の時点でこれらをすぐに行うようにしても良い。このように一旦稼働させた真空ポンプ8を停止させるのは、ゾーナルロータ14への試料注入時にはドア6を開ける必要があり、ロータ室5が大気圧になるからである。時間t5において、ゾーナル速度(試料注入・回収速度、例えば3,000rpm)までゾーナルロータ14を加速させるまえに、操作表示部12にアラーム及び遠心分離機の運転モードをゾーナルモードに変更するかを表示して、ユーザの入力を受けるようにしても良い。
【0053】
時間t8においてゾーナルロータ14への試料の注入が完了し、ユーザによるゾーナルロータへの試料注入完了が入力(スタートキーON)されたら、93bに示すように時間t8にて制御部13はドアロック機構7をロックし、その後、94b及び95bに示すように時間t9にて電磁バルブ9を閉鎖して真空ポンプ8を起動する。以降の手順は、図9で説明した時間t7以降の手順と同じであるので、繰り返しの説明を省略する。
【0054】
図6はゾーナルモードにおける遠心分離機の制御手順を示すフローチャートである。ゾーナルモードは、ユーザによるスタートキーを押下することにより開始されるが(ステップ71)、図5のステップ57、59〜66の処理を経た場合は、ステップ62に対する質問へのYESとの回答がスタートキーの代わりとなる。
【0055】
スタートキーが押下されたら、制御部13は駆動モータ4を起動させてゾーナルロータ14を回転し始め、所定の回転速度(例えば1,000rpm)に整定させてロータの種類の判別を行う。判別が終了したら第1の低速の回転速度(例えば3,000rpm)までゾーナルロータ14を加速して整定させる(ステップ72)。このとき、電磁バルブ9は開放状態、ドアロック機構7は解除状態、真空ポンプ8は停止した状態であり、ドア6は開閉自在である。ユーザはこのときにゾーナルロータ14に試料を注入する(ステップ73)。試料の注入後、ドア6を閉じ操作表示部12よりゾーナルロータへの試料注入完了(スタートキーON)を指示すると、制御部13はドアロック機構7によりドア6をロックし電磁バルブ9を閉じ(ステップ74)、ロータ室5は真空ポンプ8により減圧される(ステップ75)。
【0056】
次に、駆動モータ4は所定の低速回転速度から、あらかじめ設定した高速の回転速度(例えば35,000rpm)まで加速し(ステップ76)、設定回転速度で整定し、ゾーナルモードでの所定の時間の遠心分離が行われる(ステップ77)。この設定回転速度での回転によってゾーナルロータ14内部の試料は分離される。
【0057】
設定された時間の遠心分離運転が終了したら(ステップ78)、ゾーナルロータ14は減速されて試料注入時と同じ低速の回転速度、例えば3,000rpmに整定される(ステップ79)。次に、制御部13は真空ポンプ8を停止させ(ステップ80)、電磁バルブ9を開放する(ステップ81)。この制御によってロータ室5の圧力は大気圧となり、ドア6を開くことができるので、制御部13はドアロック機構7(ステップ82)を解除する。この状態でユーザは図3で示したようにシャフト18の上部にシール部23を取り付けて、ゾーナルロータ14の回転シール20と接触、摺動させてメカニカルシールを構成する。次に、図示しない送液ポンプを使用して分離された試料を回収する(ステップ83)。試料の回収後に、ユーザが操作表示部12から試料の回収完了の指示を操作することにより制御部13はゾーナルロータ14の回転を停止させる(ステップ85)。
【0058】
以上説明したように、本実施例の制御により、ユーザが操作ミスにより試料が注入されていないゾーナルロータをノーマルモードで運転してしまっても、高速回転させる前に制御部13が設定誤りを認識して高速回転を阻止することができ、ゾーナルロータ内のセプタの破損や短寿命化を防止することができる。また、上記制御はゾーナルロータ装着時であって運転モードの設定ミスによりノーマルモードで使用した場合にのみ実行されるので、通常の遠心分離運転での動作や処理には何ら影響を与えない。さらに、運転モードの設定ミスをした場合でも迅速に正しい運転モードでの遠心分離運転の再開ができるので、使いやすい遠心分離機を実現できると共にユーザの操作負担を最小限にすることができる。
【0059】
以上、本発明を実施例に基づいて説明したが、本発明は上述の実施例に限定されるものではなく、その趣旨を逸脱しない範囲内で種々の変更が可能である。
【符号の説明】
【0060】
1 遠心分離機 2 筐体 3 ロータ 4 駆動モータ
5 ロータ室 6 ドア 7 ドアロック機構
8 真空ポンプ 9 電磁バルブ 10 アダプタ
11 ロータ判別手段 12 操作表示部 13 制御部
14 ゾーナルロータ 15 ロータボディ
15b (ロータボディの)凸部 16 試料室 17 セプタ
17a (セプタの)貫通穴 18 シャフト
18a (シャフトの)凹部 19 カバー 20 回転シール
21 試料通路 22 押出液通路 23 シール部
24 シール支持板 25 キャップ
【特許請求の範囲】
【請求項1】
分離する試料を保持するロータと、前記ロータを収納するロータ室と、
前記ロータ室内を封じるドアと、
前記ロータを回転させるモータと、
前記モータの回転を制御する制御部と有し、前記ロータの回転開始前に試料を注入しておく通常運転モードと、前記ロータの回転中に試料を注入するゾーナルモードを有する遠心分離機において、
前記制御部は、前記通常運転モードを開始した後に装着されているロータの種類を判別し、前記ロータがゾーナルモード用のロータであると判別された場合にはゾーナルモードへの切り替えを行うことを特徴とする遠心分離機。
【請求項2】
前記ゾーナルモードにおいて、試料を注入するために前記ロータを5,000rpm以下の第一の回転速度に整定し、
前記試料を注入後に前記ロータを5,000rpm以上の設定回転速度に加速させることを特徴とする請求項1に記載の遠心分離機。
【請求項3】
前記ロータに、前記ロータの固有情報を示す手段が設けられ、
前記遠心分離機には前記固有情報を読み取るためのロータ判別手段が設けられ、
前記ロータ判別手段は、前記ロータの回転が開始した直後に前記固有情報を読み出すことを特徴とする請求項2に記載の遠心分離機。
【請求項4】
前記遠心分離機に表示部を設け、
前記通常運転モードを開始した後に装着されている前記ロータがゾーナルモード用のロータであると判別された場合に、前記制御部はゾーナルモードへの切り替えが可能であるかを判定し、
可能の場合はゾーナルモードへの切り替えを行うか否かのダイアログ表示を行い、
不可能な場合はエラーメッセージを表示して前記ロータの回転を停止させることを特徴とする請求項3に記載の遠心分離機。
【請求項5】
前記ロータを前記第一の回転速度に整定させた際に、前記制御部が前記ロータへ試料注入の有無を確認するための確認画面を前記表示部へ表示することを特徴とする請求項4に記載の遠心分離機。
【請求項6】
前記ロータ室を減圧する減圧装置と、前記ロータ室の減圧状態を解除するバルブを設け、
前記通常運転モードを開始した後に前記ロータがゾーナルモード用のロータであると判別された場合には前記減圧装置の運転を停止して前記バルブを開放し、前記ロータ室を大気圧とすることを特徴とする請求項5に記載の遠心分離機。
【請求項7】
前記減圧装置により所定の真空度に到達するまで低速回転で待機する第二の回転速度を設定し、
前記第一の回転速度は前記第二の回転速度よりも低く設定したことを特徴とする請求項6に記載の遠心分離機。
【請求項1】
分離する試料を保持するロータと、前記ロータを収納するロータ室と、
前記ロータ室内を封じるドアと、
前記ロータを回転させるモータと、
前記モータの回転を制御する制御部と有し、前記ロータの回転開始前に試料を注入しておく通常運転モードと、前記ロータの回転中に試料を注入するゾーナルモードを有する遠心分離機において、
前記制御部は、前記通常運転モードを開始した後に装着されているロータの種類を判別し、前記ロータがゾーナルモード用のロータであると判別された場合にはゾーナルモードへの切り替えを行うことを特徴とする遠心分離機。
【請求項2】
前記ゾーナルモードにおいて、試料を注入するために前記ロータを5,000rpm以下の第一の回転速度に整定し、
前記試料を注入後に前記ロータを5,000rpm以上の設定回転速度に加速させることを特徴とする請求項1に記載の遠心分離機。
【請求項3】
前記ロータに、前記ロータの固有情報を示す手段が設けられ、
前記遠心分離機には前記固有情報を読み取るためのロータ判別手段が設けられ、
前記ロータ判別手段は、前記ロータの回転が開始した直後に前記固有情報を読み出すことを特徴とする請求項2に記載の遠心分離機。
【請求項4】
前記遠心分離機に表示部を設け、
前記通常運転モードを開始した後に装着されている前記ロータがゾーナルモード用のロータであると判別された場合に、前記制御部はゾーナルモードへの切り替えが可能であるかを判定し、
可能の場合はゾーナルモードへの切り替えを行うか否かのダイアログ表示を行い、
不可能な場合はエラーメッセージを表示して前記ロータの回転を停止させることを特徴とする請求項3に記載の遠心分離機。
【請求項5】
前記ロータを前記第一の回転速度に整定させた際に、前記制御部が前記ロータへ試料注入の有無を確認するための確認画面を前記表示部へ表示することを特徴とする請求項4に記載の遠心分離機。
【請求項6】
前記ロータ室を減圧する減圧装置と、前記ロータ室の減圧状態を解除するバルブを設け、
前記通常運転モードを開始した後に前記ロータがゾーナルモード用のロータであると判別された場合には前記減圧装置の運転を停止して前記バルブを開放し、前記ロータ室を大気圧とすることを特徴とする請求項5に記載の遠心分離機。
【請求項7】
前記減圧装置により所定の真空度に到達するまで低速回転で待機する第二の回転速度を設定し、
前記第一の回転速度は前記第二の回転速度よりも低く設定したことを特徴とする請求項6に記載の遠心分離機。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】

【図7】

【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−152718(P2012−152718A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−16331(P2011−16331)
【出願日】平成23年1月28日(2011.1.28)
【出願人】(000005094)日立工機株式会社 (1,861)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月28日(2011.1.28)
【出願人】(000005094)日立工機株式会社 (1,861)
【Fターム(参考)】
[ Back to top ]