
本田技研工業株式会社により出願された特許
171 - 180 / 23,863
回転電機のステータの組み付け方法
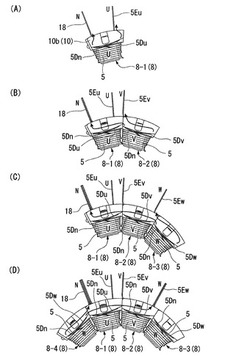
【課題】部品点数の増加を招くことなく、複数の分割コア片の組み付けとコイル導線の引き回しを容易に行うことのできる回転電機のステータの組み付け方法を提供する。
【解決手段】一つ目の分割コア片8−1に中性点側の引き出し部5Dnの引き出し位置と、給電側の引き出し部5Duの引き出し位置を設定する。一つ目の分割コア片8−1に対して、コイル導線5の巻回と、給電側の引き出し部5Duの引き回しと、中性点側の引き出し部5Dnの引き回しを行った後に、二つ目以降の分割コア片8−2,8−3…に対して、コイル導線5の巻回とともに、既にコイル導線5の巻回と引き回しを完了している分割片8−1等に跨る引き出し部5Dn(5Du,5Dv,5Dw)の引き回しを行う。
(もっと読む)
耕耘爪

【課題】耕耘性能(細土性能や残耕を少なくする性能)を容易に高めることができ、かつコストを抑えることができる耕耘爪を提供する。
【解決手段】耕耘爪25は、右耕耘軸23に取り付けられ、右耕耘軸23を回転することにより耕耘作業をおこなう爪である。この耕耘爪25は、右耕耘軸23の回転方向に対して平行に配置された支持部32と、支持部32の先端32aから右耕耘軸23の回転方向に向けて延出された切削部34とを有する。切削部34は、半径方向外側に向けて折り曲げられた屈曲部35と、屈曲部35の屈曲回転軌跡45より内側に位置する後切削部36と、屈曲回転軌跡45より外側に位置する前切削部37とを有する。
(もっと読む)
力付与装置及びその制御方法
【課題】 利用者の動作に対して電動機の出力トルクを付与する力付与装置において、利用者の動作の変化に対する追従性と安定性を両立させた力付与装置を提供する。
【解決手段】 トルク目標値Tcmdと電動機の出力トルクの実測値Tactとの偏差Terr1に基づいて回転速度目標値Vcmd1が決定される。電動機は、その回転速度の変動周波数が、利用者の動作の変動周波数以上の周波数帯域においては、回転速度目標値Vcmd1と回転速度実測値Vactとの偏差Verrに基づいて制御され、利用者の動作の変動周波数より低い周波数帯域においては、検知された回転速度Vactを0又は0の近くまで低下させたときの回転速度目標値Vcmd1と検知された回転速度Vactとの偏差Verrに基づいて制御される。
(もっと読む)
ワーク把持装置
【課題】種々のワークに対応でき、軽量化に適している把持装置を提供する。
【解決手段】ロボットアームに装着して種々のワークWを搬送するためのワーク把持装置1であって、ロボットアームに連結する支持プレート22と、支持プレート22に配設されワークWの被把持部Waを把持する把持機構11と、把持機構11を自在移動可能に支持する自在移動機構12と、把持機構11の移動を規制する移動規制装置13と、を備え、把持機構11は凹部からなる被把持部Waを内側から把持するインナータイプ、または凸部からなる被把持部Waを外側から把持するアウタータイプで構成する。
(もっと読む)
把持部位置決め治具
【課題】ロボットアームに装着されたワーク把持装置に備えられた把持部を、ロボットやワーク把持装置に把持部を移動させるための駆動装置を設けることなく、ワークの種類の変更に応じて、作業者が移動させて位置決めして、ワーク把持装置における把持部の位置を容易かつ確実に変更する。
【解決手段】ワーク把持装置1における把持機構11をワークの種類に応じて移動させて位置決めするための把持部位置決め治具400は、ワーク把持装置1における移動が許容された状態と規制された状態とに切り替えられ得る把持機構11と係合可能な係合凹部420が、ワークの種類に応じて把持機構11により把持される当該ワークの被把持部に対応した位置に設けられた治具プレート401と、ワーク把持装置1に対して治具プレート401を位置決めするための治具本体位置決め部402と、を備えている。
(もっと読む)
モータ駆動車両
【課題】モータの識別番号を目視可能とする開口部をアンダーカバーに形成する場合において、アンダーカバーの最低地上高を確保し易くしつつ、その上方に配置されるモータを極力低く配置できるようにして低重心化を図り易くし、さらに部品レイアウトの効率化を図る。
【解決手段】駆動輪の間に配されるモータ8の一部を左右及び後方から囲む凹所空間30を形成し、車両下方でモータ8を支持するフロントサブフレーム25と、モータ8の下方に配置され、フロントサブフレーム25に連結されるリヤアンダーカバー34とを備え、モータ8のハウジング18の下部に識別番号が付設され、リヤアンダーカバー34に前記識別番号を目視可能とする開口部39が形成され、識別番号が凹所空間30内に位置するとともに、開口部39の少なくとも一部が凹所空間30内に位置するように構成されるモータ駆動車両を提供する。
(もっと読む)
能動型振動騒音制御装置
【課題】制御信号を生成する際に適応FIRフィルタの演算負荷を少なくし、且つ収束性を向上させることができる能動型振動騒音制御装置を提供する。
【解決手段】所定周波数範囲のロードノイズに対する振動騒音打消音CSを生成するための制御信号Scを出力する適応FIRフィルタ30について、周波数切替部92を設け、抽出参照信号Srrの周波数成分をSAN型適応フィルタを用いて参照信号Srから抽出し、前記所定周波数成分に関するフィルタ係数W3を重点的に更新するようにしたので、少ない演算負荷で、所定周波数fの振動騒音の収束性を向上させることができる。
(もっと読む)
自動二輪車
【課題】熱や雨の影響を受け難く且つ車両の外観性に影響を与え難い位置にABSモジュールを配置する自動二輪車を提供する。
【解決手段】自動二輪車10は、シート27を支持する左右一対のシートフレーム15を有する車体フレーム11と、左右一対のシートフレーム15間に前方から順に配置される収納ボックス25及び燃料タンク26と、車輪WF,WRに制動力を与える液圧式ブレーキ45,46と、液圧式ブレーキ45,46に作用する液圧を減圧するABSモジュール70と、ハンドル22とシート27との間に形成される跨ぎ空間Sと、を備え、ABSモジュール70は、左右一対のシートフレーム15間であって、収納ボックス25と燃料タンク26に前後方向に挟まれる位置に配置される。
(もっと読む)
自動二輪車
【課題】跨ぎ空間の下方にパワーユニットを備える車両においても、ABSモジュールが受ける熱影響を小さくすることができる自動二輪車を提供する。
【解決手段】自動二輪車10は、ヘッドパイプ12から下後方に延びるメインフレーム13と、メインフレーム13の下方に配置され、シリンダ軸線SLが略水平に延びるエンジン50と、メインフレーム13の上方及び左右を覆う車体カバー35,37と、車輪WF,WRに制動力を与える液圧式ブレーキ45,46と、液圧式ブレーキ45,46に作用する液圧を減圧するABSモジュール70と、を備え、ABSモジュール70は、車両側面視において、エンジン50の前端L1と後端L2の間であって、メインフレーム13を挟んでエンジン50とは逆側に配置される。
(もっと読む)
スクータ型車両
【課題】水冷式エンジンを搭載するスクータ型車両において、収納ボックスやステップの大きさや形状を自由に決めることができるようなリザーブタンクの配置構造を提供することを課題とする。
【解決手段】(b)に示すように、リザーブタンク130をリアフェンダ100内に配置する。
【効果】リザーブタンク130がリアフェンダ100内に配置されるため、リザーブタンク130に影響されることなく、収納ボックス20の大きさや形状を決めることができる。ステップ70Rも同様に、リザーブタンク130に影響されることなく、大きさや形状を決めることができる。
(もっと読む)
171 - 180 / 23,863
[ Back to top ]