
三菱自動車工業株式会社により出願された特許
961 - 970 / 2,892
自動車用信号灯の光源取付構造
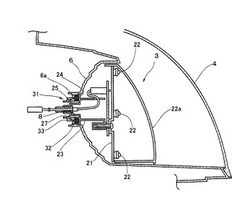
【課題】 電球バルブを取り付けるための車体側のランプハウジングを用いてLEDランプ組立体を取り付ける。
【解決手段】 電球ソケット7が取り付けられるランプハウジング6の取付穴8にLEDランプ組立体3の連結部材25を挿入し、挿入位置を規制するフランジ部24と取付穴8に係止する係止フック27とでLEDランプ組立体3をランプハウジング6に仮止めし、仮止め状態の連結部材25に押え固定部材31を嵌合して固定することで、押え固定部材31とフランジ部24とでランプハウジング6を挟持してLEDランプ組立体3を予め設定された姿勢が維持された状態でランプハウジング6に取り付ける。
(もっと読む)
台車送り装置

【課題】コスト低減及び省スペース化を図ることが可能であると共に簡単に移動することが可能な台車送り装置
【解決手段】複数台の台車2を一方より押して他方へ搬送する押し出し搬送方式の台車送り装置1であって、押し出し装置による押し出し力を受けて移動する第1の台車と第1の台車の他方向側に配置された第2の台車との間に配置され、第1の台車の押し出し力を受けて移動する入力部材7と、自身の移動により第2の台車に移動力を与える出力部材10と、入力部材7の移動量を増大させて出力部材10に伝達する伝達部材13とを有する。
(もっと読む)
ワックス塗布装置および塗布方法
【課題】ハブホイールのインロー部に均一な膜厚で十分な量のワックスを塗布することができるワックス塗布装置および塗布方法を提供する。
【解決手段】ハブホイール50を回転駆動する回転台42と、インロー部52の外周面との間に間隙48が形成されるように配置された少なくとも一つの爪部44と、少なくとも一つの爪部44のいずれかに形成され、ハブホイール50を回転させながら間隙48にワックスを吐出する吐出口49と、吐出口49を介して間隙48に吐出するワックス量を計量するワックス計量部とを備える。
(もっと読む)
内燃機関の可変動弁装置
【課題】可変制御部材の制御範囲を機構的な不都合の発生なく速やかに学習可能な内燃機関の可変動弁装置を提供する。
【解決手段】可変制御部材の作動範囲に対応するよう可変作動位置検出手段により検出される可変制御部材の作動位置に基づいて可変制御部材の制御範囲の最小値及び最大値を学習するが(S11〜S23)、内燃機関が運転状態にあるとき(S12)、可変制御部材の制御範囲の最小値の学習結果を最大値の学習に反映する(S15)。
(もっと読む)
ローラ付カム構造
【課題】動弁機構の被駆動部がベースカムからローラ本体に乗り移るときの打音を小さくすることなどが可能なローラ付カム構造を提供する。
【解決手段】ベースカムとローラとを有し、ベースカムが、バルブリフトの立ち上がりで正の第1のバルブ加速度ピークa2を生じ、バルブリフトの立ち下がりで正の第2のバルブ加速度ピークa5を生じ、これらの間でバルブ加速度が負となるバルブ加速度特性を有するローラ付カムの構造において、第1のバルブ加速度ピークと第2のバルブ加速度ピークの間で、被駆動部がベースカムのバルブリフト部からローラ本体に乗り移りのときに生じる正の第3のバルブ加速度ピークa3と、前記間で、被駆動部がローラ本体からバルブリフト部に乗り移りのときに生じる正の第4のバルブ加速度ピークa4とが、第1のバルブ加速度ピークと第2のバルブ加速度ピークよりも小さくなるように、ローラ本体の径と取り付け位置とを設定する。
(もっと読む)
車体下部構造
【課題】フロアパンとフロアサイドメンバとの間に水が入り込むことを防止できる車体下部構造を提供する。
【解決手段】車体下部構造をなす下部フレーム構体11は、車体10の床部を構成するフロアパン30と、車体10の骨格をなす左右一対のフロントサイドメンバ51,52と、左右一対のフロアサイドメンバ53,54などを有している。フロアパン30にサイドメンバ収容部41,42が形成されている。このサイドメンバ収容部41,42にフロアサイドメンバ53,54が収容され、スポット溶接等の固定手段によってフロアサイドメンバ53,54がフロアパン30とフロントサイドメンバ51,52に固定されている。このサイドメンバ収容部41,42によってフロアサイドメンバ53,54が車体10の下側から覆われることにより、サイドメンバ収容部41,42がフロアサイドメンバ53,54のための防水カバーとして機能するようになっている。
(もっと読む)
内燃機関の可変動弁装置
【課題】可変制御部材の制御範囲を機構的な不都合の発生なく速やかに学習可能な内燃機関の可変動弁装置を提供する。
【解決手段】内燃機関が運転状態にあるとき(S02)、可変制御部材の現在までの制御範囲の最小値を基準として規制部材から所定の近接距離位置を制御目標位置に設定し(S03)、可変制御部材の作動位置が該所定の近接距離位置となるようアクチュエータを第1の速度以上で作動させた後(S04)、可変制御部材が規制部材の位置に到達したことを判定するまでアクチュエータを第1の速度より遅い第2の速度以下で作動させ(S05,S06)、可変制御部材が規制部材の位置に到達したことを判定すると可変作動位置検出手段により検出された作動位置を可変制御部材の新たな制御範囲の最小値として学習する(S07〜S10)。
(もっと読む)
車体開口部を開閉する開閉体
【課題】車体開口部を開閉する開閉体において、接着剤とシール剤との接触を回避することによりアウタパネルとインナパネルとの間に生じる錆の発生を防止する。
【解決手段】インナパネル3に、第1隔離壁21と第2隔離壁22と貫通孔23とを有する排出部を形成することにより、第1隔離壁21と第2隔離壁22とが接着剤とシール剤との隔離壁となり接着剤とシール剤との接触を回避することができる。
(もっと読む)
車両周辺監視装置
【課題】俯瞰画像上で全体が表示されていない目標物に対し、俯瞰画像上の境界線を変更し全体を表示できるようにした車両周辺監視装置を提供すること。
【解決手段】複数の撮像装置が互いに共通する視野領域とする俯瞰画像の共通領域に位置する障害物と判定された画像から抽出された複数の特徴点に対し、三次元計測処理部43において得られた相対運動情報による一定の経過時間を想定したときの予想軌跡と時刻変化をもとに、前記共通領域を互いに共通する視野領域とする各カメラについて“前記特徴点が写る/写らない”を予測しその予測結果を得る。そして、前記予測結果から、前記俯瞰画像の共通領域について、前記特徴点が抽出された障害物131をより広範囲に写すことの可能なカメラによる部分俯瞰画像を優先させ、フィードフォワード的に俯瞰画像の繋ぎ目、境界線を変更し、障害物131がより広範囲に俯瞰画像に表示されるようにする。
(もっと読む)
運転支援装置
【課題】俯瞰映像上で抽出した特徴点の三次元座標における高さを含む特徴点情報をもとに自車両に対する障害物を検知できる運転支援装置を提供すること。
【解決手段】一定の時間間隔Δtごとに俯瞰映像を取り込み、特徴点抽出処理部3において特徴点Pを抽出する。そして、前記抽出した特徴点Pがどのような動きをするかを特徴点追跡処理部4において追跡処理し、特徴点Pのオプティカルフローを計算することでその動きベクトルを求める。次に、三次元計測処理部5において俯瞰映像上の特徴点Pの位置の変化から自車両と特徴点Pとの相対運動情報と、前記特徴点Pの三次元座標情報を算出する。さらに、前記算出した前記相対運動情報と前記三次元座標情報とから障害物検知処理部6において障害物を検知し、距離による障害物エリアAと衝突予想時間による障害物エリアBとにおける障害物情報を出力する。
(もっと読む)
961 - 970 / 2,892
[ Back to top ]