
株式会社安川電機により出願された特許
91 - 100 / 2,482
負荷情報を活用した情報表示装置
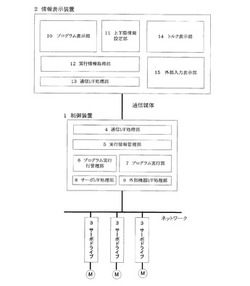
【課題】制御装置と情報表示装置とからなる制御システムにおいて、コントローラで実行しているプログラムの実行ブロックと関連付けた状態で駆動軸の負荷トルク情報を管理・取得し、それらの情報をプログラム表示に対応づけて表示させることにより、プログラムのどの部分の動きを行っている際に大きな負荷がかかっているのかを把握する。
【解決手段】コントローラで実行しているプログラムの現在実行ブロックに関連付けて駆動軸の負荷トルク情報を取得・管理するようにすると共に、任意の制限トルクを設定し、その設定値を超える箇所に関してはプログラムの状態表示を変更する。
(もっと読む)
積層コア、積層コアの製造方法及び回転電機

【課題】積層時間を短縮して効率よく製造することのできる積層コアを提供する。
【解決手段】積層コア(1)は、積層された複数のリング状コアプレート(2)を備えている。リング状コアプレート(2)は、それぞれ方向性電磁鋼板により形成され、複数のティース(31)が所定間隔をあけて並設された分割コア(3)を環状に複数配置した構成である。分割コア(3)は、前記方向性電磁鋼板の磁化容易方向(M)に沿った仮想中心線(M0)を有し、各ティース(31)の共通の半径中心から、仮想中心線(M0)を挟んで左右にそれぞれ所定角度で振って規定された長さを有する。
(もっと読む)
フィードバック制御系の振動検出装置及び振動検出装置を備えたモータ制御装置
【課題】モータまたは負荷の慣性モーメントの値がずれても振動状態を精度良く検出し、素早く異常を察知して騒音や機械系の損傷等を防止することができるフィードバック制御系の振動検出装置および振動検出装置を備えたモータ制御装置を提供する。
【解決手段】負荷を連結したモータを制御対象とする制御装置の振動検出装置であって、制御装置は、制御対象をフィードバック制御してモータを制御する制御器部と、制御装置の出力の上下限ピーク値とそれらの発生時刻に基づいて、振動の発生を判断する振動状態判断部と、を備えた。
(もっと読む)
回転電機
【課題】永久磁石の外周面の周方向の端部近傍が電機子反作用による反磁界の影響を受けて不可逆減磁が発生するのを抑制することが可能な回転電機を提供する。
【解決手段】この電動機100(回転電機)は、ロータコア22と、ロータコア22の外周部に対向するように配置されるステータティース11と、ロータコア22の内部に内周部側から外周部側まで半径方向に延びるように設けられた永久磁石23a(23b)とを備え、ロータコア22の外周部には、永久磁石23a(23b)の外周面の周方向の端部近傍を覆う端部被覆部22dが設けられており、端部被覆部22dの内周面と永久磁石23a(23b)の外周面との間には、空隙30が設けられている。
(もっと読む)
塗装システムおよびドア開閉用ロボットの開閉ハンド
【課題】走行装置を用いることなくドアの内側部の塗装を行うことが可能な塗装システムを提供する。
【解決手段】この塗装システム100は、車体120を搬送するコンベア10と、高さ位置H2に固定的に設置され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の内部を少なくとも塗装する塗装用ロボット20と、高さ位置H2とは異なる高さ位置H3に固定的に設置されるとともに塗装用ロボット20と作業範囲がオーバーラップ可能なように構成され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の開閉およびドア開放状態の保持を行うドア開閉用ロボット30とを備える。
(もっと読む)
回転電機
【課題】永久磁石の内周面側から漏れる漏れ磁束を低減するとともに、永久磁石の内周面側の端部の不可逆減磁が発生するのを抑制することが可能な回転電機を提供する。
【解決手段】この電動機100(回転電機)は、ロータコア22と、ロータコア22の外周部に対向するように配置されたステータティース11と、ロータコア22の内部に設けられ、周方向の幅がロータコア22の内周部側から外周部側に向かって大きくなるように形成された永久磁石23aおよび23bとを備え、永久磁石23aおよび23bの内周面側には、空隙30が設けられている。
(もっと読む)
ロボットシステム
【課題】シャフトに対して環状部品を嵌合する組立作業をロボットによって自動的に行う場合に、歩留まりを向上させること。
【解決手段】ロボットシステムは、環状部品の内周面と係合する係合部材を周面に取付け可能なシャフトを把持して回動させるロボットと、前記環状部品を固定するための冶具と、前記環状部品が嵌合された前記シャフトを前記ロボットによって把持させ、該環状部品を前記冶具へ接触させた状態で、前記ロボットによって該シャフトへ回動力を付加させる制御部と、前記回動力を付加させた場合における前記ロボットの動作に基づいて前記シャフトへ前記係合部材が取付け済みか否かを判定する判定部とを備える。
(もっと読む)
接着剤塗布装置
【課題】汎用性を向上することができるようにする。
【解決手段】接着剤塗布装置10は、ロボットアーム12aを備えたロボット12と、ロータ56を設置するためのロータセット治具14と、接着剤を収容したカートリッジ58を装着可能なホルダ部16aを備え、当該ホルダ部16aに装着されたカートリッジ58内の接着剤を吐出する、ロボットアーム12aの先端に取り付け可能なガン16と、所定圧の圧縮エアの、ガン16のホルダ部16aに装着されたカートリッジ58内への供給をオン・オフ切替制御する電磁弁22と、ロボット12の動作を制御するロボットコントローラ50と、電磁弁22によるオン・オフ切替制御、及び、ロボットコントローラ50によるロボット12の動作制御を連携して制御する上位コントローラ52とを有する。
(もっと読む)
多層配線基板及び電子機器
【課題】各絶縁層を構成する繊維の層間に生ずるひずみが低減された領域を形成することが可能な多層配線基板及び電子機器を提供する。
【解決手段】多層配線基板、複数の繊維が予め決められた繰り返しパターンで織られ、樹脂が含浸されて板状に形成された第1の絶縁層21と、複数の繊維が予め決められた繰り返しパターンで織られ、樹脂が含浸されて板状に形成された第2の絶縁層22と、第1の絶縁層21と第2の絶縁層22とを接着する樹脂層23とを備え、第1の絶縁層21の繰り返しパターン及び第2の絶縁層22の繰り返しパターンは、向きが揃うように配置され、且つ、第1の絶縁層21の繰り返しパターンの位置が、第2の絶縁層22の繰り返しパターンの位置に対して、予め決められた距離ずれている。
(もっと読む)
ロボットおよびロボットの製造方法
【課題】軌跡の高精度化と移動速度の高速化とを両立させること。
【解決手段】上記の課題を解決するために、多関節アームと、かかる多関節アームの関節に設けられる減速機およびモータとを備え、減速機は、上記の多関節アームにおける所定の代表位置のたわみ量を3次元座標系の各次元について取得した取得値それぞれが、上記の多関節アームの目標精度に対応した閾値以下となる剛性を有し、モータは、上記の減速機を負荷として含んだ場合に、かかる負荷側の慣性モーメントと略同一の慣性モーメントを有するようにロボットを構成する。
(もっと読む)
91 - 100 / 2,482
[ Back to top ]