
株式会社アドヴィックスにより出願された特許
141 - 150 / 1,291
路面勾配推定装置、車両用制御装置、及び車両用制御システム
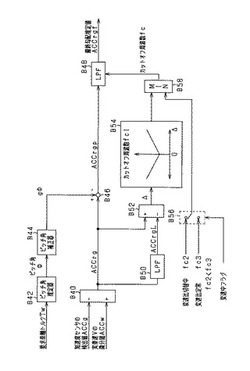
【課題】車両の走行速度(実車速V)の微分値ACCw及び自身に加わる力に基づき加速度を感知する加速度センサの検出値ACCgに基づき、車両の走行する路面の勾配を高精度に推定することが困難なこと。
【解決手段】微分値ACCw及び検出値ACCgの差として、第1推定値ACCrgが算出され、これに所定の補正がなされることで第2推定値ACCrgpが算出される。第2推定値ACCrgpにローパスフィルタB48にてフィルタ処理を施すことで、勾配推定値ACCrgfが算出される。第1推定値ACCrgと、ローパスフィルタB50によりこれにフィルタ処理を施した遅延推定値ACCrgLとの差に基づき、勾配変化推定値Δを算出する。ローパスフィルタB48のカットオフ周波数fcは、上記勾配変化推定値Δに応じて可変設定される。
(もっと読む)
制動力制御装置

【課題】車輪の制動能力を適切に発揮させることができる制動力制御装置を提供すること。
【解決手段】車両の各車輪の制動力を制御可能であり、左右一対の車輪のうちスリップ量が相対的に大きい車輪(S1肯定)である第一車輪の制動力の増加を抑制し(S3)、かつスリップ量が相対的に小さい車輪である第二車輪の制動力を増加させる。第一車輪に対する路面の摩擦係数がピークに達する前でかつ当該ピークの近傍である(S2肯定)ときに第一車輪の制動力の増加を抑制するようにしてもよい。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために作動する制御対象の制御量を演算し、演算した制御量に基づいて制御対象を制御する。また、車両のドライバの操舵操作量に基づいて制御対象の制御を停止するか否かを判断する。制御対象の制御を停止すると判断したときに、そのときから制御対象の制御量が縮退するように縮退制御量を決定する。制御対象の制御を停止すると判断したときに、決定した縮退制御量に基づいて制御対象の制御量を制御する。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をVLP、より詳しくはVLPのF/F演算部6やF/B演算部7に伝え、アベイラビリティに基づいて車両横方向運動制御に使用する制御対象の優先順位を決定する。このように、各制御対象のアベイラビリティを加味して車両横方向運動制御に使用する制御対象の優先順位を決定しているため、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
運動量制御装置
【課題】 制御対象の運動状態が安定するように設定されたフィードバックゲインを用いて制御対象の運動量をフィードバック制御する運動量制御装置を提供すること。
【解決手段】 運動量制御装置は、複数のアクチュエータのうちの一つのアクチュエータを単独で作動させることにより制御対象の運動量をフィードバック制御した場合に用いる最適フィードバックゲインを、複数のアクチュエータのそれぞれが単独で作動した場合についてそれぞれ取得する最適フィードバックゲイン取得部と、最適フィードバックゲイン取得部により取得された複数の最適フィードバックゲインのうち最小のフィードバックゲインを制御系のフィードバックゲインとして設定するフィードバックゲイン設定部とを備える。
(もっと読む)
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】機関ECU31により算出される内燃機関11の出力トルクと加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。車両10がスリップ状態であると判定されるときには、上記出力トルクの制限を禁止する。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
141 - 150 / 1,291
[ Back to top ]