
国立大学法人 名古屋工業大学により出願された特許
661 - 670 / 784
作業補助装置
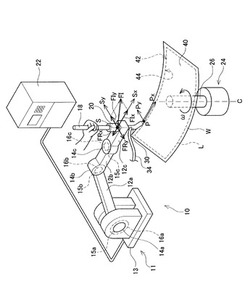
【課題】 対象物に固定された基準点を目標軌道に直交する方向には蛇行させることなく目標軌道に沿って移動させる作業を容易する装置を提供する。
【解決手段】 作業補助装置10の移動機構11は塗布器具30と操作子18が配置されており操作子18に加える力に従って塗布器具30が移動する。塗布器具30の基準点PをワークW上の目標軌道Lに沿って移動させる際、コントローラ22は目標軌道Lに沿った仮想案内面40と仮想案内面上で第1側方42と第2側方44を設定する。基準点Pの仮想案内面への投影位置が目標軌道Lと一致するときに第1側方42から第2側方44へ向かう方向に大きな操作抵抗力FRを操作子18に発生させる。作業者は基準点Pを仮想案内面40に押し付けつつ目標軌道Lに沿って基準点Pを動かすように操作子18を操作する。基準点Pを目標軌道Lに直交する方向には蛇行させずに目標軌道Lに沿って移動させることができる。
(もっと読む)
放電加工方法及び放電加工装置

【課題】放電加工において、加工面の表面粗さを小さくするための仕上げ加工時間を短時間とする放電加工方法を提供する。
【解決手段】液中放電によって加工液が気化・分離して生じる気泡を工具電極、工作物及び放電加工装置のいずれかに取り付けた容器に捕集し、当該容器内に気泡が溜まることによって、又は当該容器に不活性ガスや窒素などの気体を供給することによって、当該容器内の液面が低下することで、液中加工の状態から気中加工の状態へ移行させることを特徴とする放電加工方法。
(もっと読む)
作業補助装置
【課題】 予め目標軌道を記憶させずとも対象物を目標軌道に追従させやすいように操作子の操作反力を制御する。
【解決手段】 作業補助装置10の移動機構11は塗布器具30と操作子18を有している。操作子18は、移動機構11によって移動させる基準点Pの移動位置を指示するために、作業者が並進操作と回転操作を加えることができる。コントローラ22は、操作子18に固定されている基準線(x軸)の方向と並進操作方向のなす角が大きいほど、並進操作に対して大きな操作反力を操作子18に付与するように移動機構11のアクチュエータ群16を制御する。また回転操作に応じて塗布器具30に固定された基準点Pを中心として塗布器具30を回転させる。これにより塗布器具30のx軸方向を目標軌道Lの方向に一致させつつ、基準点Pを目標軌道Lに沿って移動させることが容易になる。
(もっと読む)
燃料電池電解質膜
【目的】メタノールのクロスオーバーが抑えられた、発電効率および燃料効率の高い燃料電池を提供することを目的とする。
【構成】フッ化スルホン酸高分子膜とハイブリッド化させた無機化合物を重合し、架橋させることで、メタノールのクロスオーバーを著しく低減した電解質膜を用いる燃料電池。
(もっと読む)
光学活性スルフィナート類の製造方法
【目的】光学活性スルホキシドを製造する原料として有用な光学活性芳香族および脂肪族スルフィナートの汎用性のある効率的製造法を提供する。
【構成】光学活性スルフィナート生成過程において、スルフィニルクロリドと光学活性イミダゾリン誘導体とジアステレオマー塩を形成し、アルコール類と一方のジアステレオマー塩のみが優先的に反応することにより光学活性スルフィナート類が生成する。
(もっと読む)
交流−交流直接電力変換器の制御装置
【課題】交流−交流直接電力変換器のスイッチング周期における出力電圧リプルを低減し、発生ノイズを低減すると共に、複雑な制御の切替を必要としない安価な制御装置を提供する。
【解決手段】交流電源の各相と出力側の各相とが双方向性の交流スイッチにより直接接続され、前記交流スイッチのオンオフ動作により、交流電源電圧を任意の大きさ及び周波数の電圧に直接変換する交流−交流直接電力変換器に関する。出力電圧の大きさに関わらず、最大電圧を出力させる相の交流スイッチに対しては電源側の最大電圧相及び中間電圧相に接続されるようにスイッチングパターンを決定し、最小電圧を出力させる相の交流スイッチに対しては電源側の中間電圧相及び最小電圧相に接続されるようにスイッチングパターンを決定する。
(もっと読む)
画像センサとレーザーによる衝突回避システム
【目的】本発明は,画像センサとレーザーを用いて衝突の危険を予測・回避するシステムを提供することを目的とする。
【構成】、単眼の特殊画像センサとレーザーを併用し障害物や陥没などの凹凸情報を取得することが可能であり、同様のシステムを搭載した機械であれば、出会い頭の衝突を未然に予測し、防止することを特徴とする。
(もっと読む)
3次元作業療法支援ロボットシステム
【目的】実際の作業療法現場で実施されている「サンディング器具」を用いた訓練など,3次元的な身体運動を仮想的に模擬できるリンク機構系を考案して、実際の作業療法の利用環境や被訓練者の身体状態などを考慮しながら親和性の高い機器を提供する。
【構成】ベース部から2本のリンクが伸びておりさらにそれらと平行なリンク平行四辺形をなしたパラレルリンクと、これらのリンクを駆動するためベース部に配置したアクチュエータ等とを備えたことを特徴とする3次元作業療法支援ロボットシステム。
(もっと読む)
画像処理用部品データ作成方法及び画像処理用部品データ作成装置
【課題】 部品の種類に応じた適切な部品データを自動的に作成できるようにする。
【解決手段】 画像処理用部品データの作成対象となる部品の画像データを取り込み、この部品の画像データから当該部品の特徴を表す部分のデータ(以下「特徴データ」という)を抽出する。この特徴データには、水平方向と垂直方向のピクセル頻度とゼロクロスパターン頻度のデータが含まれる。この後、抽出した特徴データをリファレンス用部品データのデータベースの特徴データと比較して両者が最も一致する部品の種類を自動判別する。判別した部品の種類に応じて当該部品の画像データから当該部品の画像処理用部品データ(ボディ、リード、バンプ等の位置やサイズ等のデータ)を抽出する。この後、抽出した部品の画像処理用部品データを画像処理用部品データのデータベースに当該部品の種類と関連付けて保存する。
(もっと読む)
二次電池の残存容量演算方法
【課題】過重な演算負担を回避しつつニューラルネット演算により残存容量を高精度に抽出可能な二次電池の残存容量演算方法を提供すること。
【解決手段】ニューラルネット部107は、満充電から所定容量放電した時の電池状態量xmと、この電池状態量の現在値xtとの比(xt/xm)、又はxmとxtとの一次関数値をニューラルネット演算における入力パラメータ、特にその電池劣化関連量としての入力パラメータとして用いてSOCを演算する。これにより、ニューラルネットに入力される劣化関連量とSOCとの相関が電池ばらつきによりばらつくのが減少するため、高精度にSOCをニューラルネット演算することができる。
(もっと読む)
661 - 670 / 784
[ Back to top ]