
ルーク ラメレン ウント クツプルングスバウ ベタイリグングス コマンディートゲゼルシャフトにより出願された特許
211 - 220 / 236
トルク伝達装置

【課題】公知の形式のトルク伝達装置を改良して、ツインクラッチの支承を改善する。
【解決手段】ミッドプレッシャプレートが半径方向で少なくとも伝動装置入力軸のうちの1つに支承されているようにした。
【効果】ツインクラッチのための剛性的かつコンパクトな支承が提供される。ミッドプレッシャープレートは直接的に伝動装置入力軸の内の1つに支承されているか、または間接的に例えば実質的に管形のボス部分を介して伝動装置入力軸の内の1つに支承されていることができる。
(もっと読む)
クランク軸に相対的な往復動ピストン内燃機関のカム軸回転角度位置を確定するための方法

【課題】カム軸のクランク軸に対する相対的な回転角度位置をさらに正確に確定できるように改善を行うこと。
【解決手段】少なくとも2つの調整シャフト回転角度測定値と、調整シャフト測定時点間の時間差並びに最後の調整シャフト測定時点と基準時点の間の時間間隔とから、調整シャフトが基準時点において有している回転角度に対する推定値を外挿により求め、
前記推定値と、少なくとも1つのクランク軸回転角度測定値と、伝動装置パラメータとから回転角度位置に対する値を確定する。
(もっと読む)
円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両
本発明は、入力側の円錐形プーリペアと、出力側の円錐形プーリペアと、トルク伝達のための巻掛け手段とを備えた円錐形プーリ式巻掛け変速機の形の自動変速機に関する。この場合、バリエータが、剛性の点で最適化されて形成されている。 (もっと読む)
円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両
本発明は、入力側の円錐形プーリペアと、出力側の円錐形プーリペアと、トルク伝達のための巻掛け手段とを備えた円錐形プーリ式巻掛け変速機の形の自動変速機に関する。この場合、バリエータが、構成スペースの点で最適化されて形成されている。 (もっと読む)
円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両
円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両
本発明は、円錐形プーリ式巻掛け変速機に関する。本発明の構成では、入力側のシャフトと出力側のシャフトとが設けられており、該シャフトのうちの少なくとも一方のシャフトが、該シャフトの長手方向に延びる少なくとも1つの孔を有しており、該孔を起点として斜孔または横方向孔が設けられており、該斜孔または横方向孔の、前記シャフトの外周面における出口が、可動プーリの軸方向位置とは無関係に可動プーリによってカバーリングされる範囲に配置されている。 (もっと読む)
2つの軸を連結するための装置
本発明は、互いに間隔を置いて軸線平行にまたは互いに角度を成して配置された2つの軸を連結するための装置であって、少なくとも1つの連結エレメントが設けられている形式のものに関する。少なくとも1つの第1の回転する質量体と1つの第2の回転する質量体とが設けられており、両質量体が、ねじり振動を減衰するために、少なくとも1つの振動減衰エレメントと協働するようにした。  (もっと読む)
(もっと読む)
ツインクラッチ伝動装置および該伝動装置の制御方法
【課題】ツインクラッチ伝動装置において、安全上クリティカルでありかつドライブトレインの耐用年数に作用を及ぼす状況を、低コストでしかも煩雑になることなく回避ないしは低減する。
【解決手段】駆動ユニットと、それぞれ摩擦クラッチを介してこの駆動ユニットと結合可能であってそれぞれ複数の変速段をもつ2つのサブトランスミッションが設けられている。各変速段に対し、この変速段に対応づけられたトランスミッション入力軸の所定の最大回転数が決定される。その際、大きい方の変速比と小さい方の変速比を用いて2つのサブトランスミッションに同時に変速段を投入すべきときに、大きい方の変速比をもつ変速段によるトランスミッション入力軸の回転数が制限される。
(もっと読む)
無段階に調節可能な変速比を有するパワースプリット式の伝動装置
無段階に調節可能な変速比を有するパワースプリット式の伝動装置は、相対回動不能に駆動軸(6)に結合された入力車(24;50;70)を備えた、入力側の分配伝動装置(12)と、バリエータ(14)と、被動軸(10)と、2つのクラッチK1,K2とを有しており、分配伝動装置の入力車が、分配伝動装置の、少なくとも1つの車を介して、バリエータの入力軸(20)に回転係合しており、分配伝動装置の出力車(30;54;82)が、バリエータに対して機能的に並列に配置された中間軸(32)に回転係合しており、該中間軸(32)がバリエータの出力軸に回転係合しており、中間軸(32)が、第1のクラッチK1を介して、被動軸(10)に回転係合することができ、かつ入力軸(20)が、第2のクラッチK2を介して、被動軸(10)に回転係合することができるようになっている。 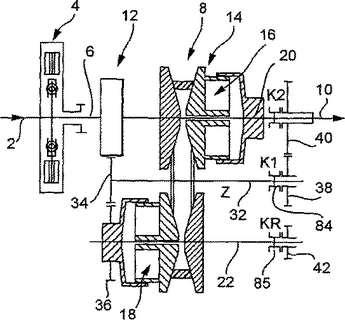 (もっと読む)
(もっと読む)
ECモータの作動方法
【課題】基準ポジション値に基づき絶対ポジション値を追従制御するECモータにおいて、絶対ポジション値捕捉時のエラー検出を簡単に行う。
【解決手段】1次側に配置された磁界センサにより、2次側と1次側との相対位置に依存する測定値組み合わせを有する測定シーケンスを捕捉する。2次側を基準位置に位置決めすることにより絶対ポジションを求め、測定値組み合わせにおいて変化が発生するたびに基準ポジション値に基づき絶対ポジション値を追従制御する。所定の方向の2次側と1次側との相対運動について基準シーケンスを求め格納し、基準シーケンスと基準ポジションで現れる測定値組み合わせと測定値組み合わせにおいて現れる変化の個数とから、絶対ポジション値に対応づけられた目標値組み合わせを求め、該当する絶対ポジション値について求められた測定値組み合わせと比較し、偏差が生じたならばエラーとする。
(もっと読む)
211 - 220 / 236
[ Back to top ]