
THK株式会社により出願された特許
11 - 20 / 420
アクチュエータ
【課題】剛性を高め、スムーズな動作を実現したアクチュエータを得る。
【解決手段】このアクチュエータ10は、固定部材21と、移動部材31と、固定部材21と移動部材31との間に設置される移動力発生手段45付きの転がり案内装置40と、を備え、移動力発生手段45が発生する移動力と、第一案内部22,32に基づく滑り案内又は転がり案内と、第二案内部41a,42a,43に基づく転がり案内とによって、固定部材21に対する移動部材31の相対的なスライド移動が行われるものであって、第一案内部22,32の摩擦抵抗が第二案内部41a,42a,43の摩擦抵抗よりも大きくなるように構成されるとともに、移動力発生手段45による移動力が移動部材31に対して及ぼされる作用点Nが、第二案内部41a,42a,43の位置Lよりも第一案内部22,32の位置Mに近くなるように構成されている。
(もっと読む)
アクチュエータ

【課題】アクチュエータの幅方向寸法を抑えたコンパクトな外形形状にでき、部品点数を削減することが可能なアクチュエータを提供する。
【解決手段】長手方向に延びる第1の転動体転走溝を有する軌道部材と、前記軌道部材の長手方向と平行に設けられるとともに外周に第2の転動体転走溝を有するねじ軸と、転動体を介して前記軌道部材及び前記ねじ軸に沿って軸方向に移動可能に組み付けられた移動部材と、前記軌道部材の端部に取り付けられる取付部と前記ねじ軸の端部が回転自在に保持される回転保持部を有するハウジングを備えるアクチュエータであって、前記ハウジングには、前記移動部材の位置を検出する位置検出手段を取り付ける取付手段が設けられる。
(もっと読む)
ロボットの関節構造及びこの関節構造が組み込まれたロボット
【課題】自由度が2以上の関節を実現することができると共に、関節の小型化を図れるロボットの関節構造を提供する。
【解決手段】本発明のロボットの関節構造は、第一部材22に第一の軸線の回りを回転可能に支持される第一の中間リンク26aと、一端が第二部材23にボールジョイントを介して連結されると共に、他端が第一の中間リンク26aにボールジョイントを介して連結される第一のアーム25aと、第一の中間リンク26aを第一の軸線の回りに回転させる第一のアクチュエータ28aと、第一部材22に第二の軸線の回りを回転可能に支持される第二の中間リンク26bと、一端が第二部材23にボールジョイントを介して連結されると共に、他端が第二の中間リンク26bにボールジョイントを介して連結される第二のアーム25bと、第二の中間リンク26bを第二の軸線の回りに回転させる第二のアクチュエータ28bと、を備える。
(もっと読む)
転がり案内装置
【課題】 転動体が負荷通路に出入りすることに起因して移動ブロックに生じるウェービングを効果的に抑制し、搬送対象物である移動体を高精度に案内することが可能な転がり案内装置を提供する。
【解決手段】 長手方向に沿って転動体の転走面が複数形成された軌道レールと、前記転走面と対向して転動体の負荷通路を構成する複数の負荷転走面を有する移動ブロックとを備えており、また、各負荷転走面はその長手方向の両端に設けられた一対のクラウニング領域及びこれらクラウニング領域の間に位置する実効負荷領域を有している。そして、前記移動ブロックは前記クラウニング領域と実効負荷領域との境界位置が異なる少なくとも2種類の負荷転走面を含んでいる。
(もっと読む)
ロボットの関節構造及びこの関節構造が組み込まれた人間型ロボット
【課題】第一部材に対して第二部材を直角な二軸の回りを相対的に回転させる関節構造を構築できると共に、関節構造の軽量化、小型化を図れるロボットの関節構造を提供する。
【解決手段】本発明のロボットの関節構造は、第一部材31と、第一部材31に第一の軸52の回りに回転可能に支持される支持部34と、支持部34に第一の軸52に直角な第二の軸54の回りに回転可能に支持される第二部材32と、第一部材31と第二部材32との間に架け渡され、本体部42a,42b、及び本体部42a,42bに対して軸線方向に相対的に直線運動する軸部43a,43bを有する第一及び第二の直動アクチュエータ41a,41bと、を備える。第一及び前記第二の直動アクチュエータ41a,41bを伸縮させることによって、第一部材31に対して第二部材32が直角な二軸52,54の回りを相対的に回転する。
(もっと読む)
直線運動案内機構付アクチュエータ
【課題】ハウジングの軸線方向の端部に軸の回転位置を検出するセンサを設けることができ、また軸のストローク以上にスケールが長くなるのを防止できる直線運動案内機構付アクチュエータを提供する。
【解決手段】ロータ4の、軸受14a,14bに支持される軸線方向の端部10c−2を、ハウジング2の内側から外側に向かって軸受14a,14bから軸線方向に突出させる。ハウジング2に設けられるセンサ27によって、軸受14a,14bから突出するロータ4の端部10c−2の回転位置を検出することを可能とする。
(もっと読む)
ロボットの関節構造及びこの関節構造が組み込まれた人間型ロボット
【課題】小型化を図れると共にがたつきをなくすことができるロボットの関節構造を提供する。
【解決手段】本発明のロボットの関節構造は、第一部材31と、第一部材31に軸線A1の回りに回転可能に支持されると共に、第二部材41に結合可能な回転出力軸32と、本体部62a,62b及び本体部62a,62bに対して直線運動する軸部63a,63bを有する第一及び第二の直動アクチュエータ24a,24bと、を備える。第一及び第二の直動アクチュエータ24a,24bの本体部62a,62bが第一部材31に回転可能に支持され、軸部63a,63bが回転出力軸32に連結される。第一及び第二の直動アクチュエータ24a,24bを伸縮させることによって、第一部材31に対して回転出力軸32を軸線A1の回りに相対的に回転させる。
(もっと読む)
ダンパ連結装置
【課題】 免震装置に大規模な振幅に対応できる減衰力の大きいダンパを装備するとしても、そのダンパの伸縮作動が要請される場合以外はその伸縮作動をキャンセルさせることを可能にする。
【解決手段】 ダンパDと固定体Gとの連結が切替自在なダンパ連結装置であって、ダンパDに取り付けられるフレーム体4と、このフレーム体4に設けられ、下方に移動自在なロックピン1と、このロックピン1から水平方向に所定の距離だけ離れた位置に、このロックピン1が挿入される孔2aを有し、ロックピン1の下方に設けられて固定体Gに固定されるプレート3と、ロックピンの下方位置にこのロックピン1が挿入される孔2aを有し、プレート3の下方に設けられて固定体Gに固定されるベースフレーム2とを備える。
(もっと読む)
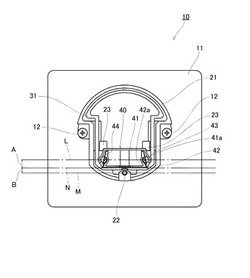
スライドレール、アクチュエータ
【課題】コンパクト化を実現したスライドレールと、このスライドレールを備えるアクチュエータを提供する。
【解決手段】スライドレール10は、固定部材に取り付けられる固定側レール11と、固定部材に対してスライド移動する移動部材に取り付けられる移動側レール12と、固定側レール11及び移動側レール12のそれぞれに設けられた転動体転走面11b,12bの転走面間に転動自在に介装される複数の転動体13と、複数の転動体13を転走面間内で転動自在に保持する転動体保持器14と、を備えており、端面側から見た場合の外郭形状が円弧形状を含んで構成されている。
(もっと読む)
可動体案内構造
【課題】
搭載対象物の荷重を十分に負荷することが可能であり、もって枠体に対する箱体のがたつきを抑えることができ、更に、枠体に対する箱体の円滑な運動を達成することが可能な可動体案内構造を提供する。
【解決手段】
第一構造体に対して第二構造体を円弧状に案内するものであり、前記第一構造体に設けられると共に一定の曲率で円弧状に形成された軌道部材と、多数の転動体を介して前記軌道部材に組み付けられて当該軌道部材に沿って運動すると共に前記第二構造体に対して回転自在に取り付けられた支持案内機構と、前記軌道部材に対する支持案内機構の移動を許容しつつ、前記第一構造体に対する第二構造体の姿勢変化を防止する周り止め機構と、を備える。
(もっと読む)
11 - 20 / 420
[ Back to top ]