
株式会社ユピテルにより出願された特許
201 - 210 / 238
状態検出システム及びそれに用いる親機並びに機器及び反射器
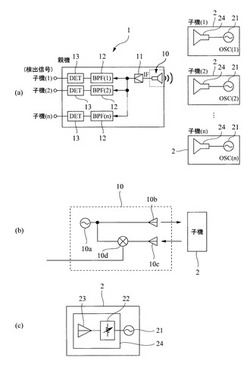
【課題】 マイクロ波を利用したドップラーセンサを用いつつ、子機側の回路規模が小さく簡単で、子機はキャリア周波数の発振が不要で、子機同士が干渉しない状態検出システムを提供すること
【解決手段】 複数の子機2とその子機に関する状態を検出する親機1とを備える。子機は、アンテナ23と、ベースバンド信号発生器21と、ベースバンド信号発生器によって発生されたベースバンド信号に基づき、アンテナに対するインピーダンスを可変するインピーダンス可変器22とを備え、ベースバンド信号発生器の周波数を子機ごとに異なせる。親機は、マイクロ波ドップラーセンサ10と、マイクロ波ドップラーセンサから出力されるIF信号を増幅するアンプ11と、そのアンプの出力を子機ごとに異なる周波数に基づいて周波数別の信号に弁別する複数のバンドパスフィルタ13と、IF検波回路14とを備える。
(もっと読む)
電波信号報知装置

【課題】 受信部の構成は従来と同様にコストを抑えた典型的な構成を採ることができ、テレビやFMラジオ等の放送など他の強電力の電波を受信してしまうことでの誤動作を防止することができる電波信号報知装置を提供すること
【解決手段】 受信部2,RSSI検出部3,報知制御部4,表示部5,検波部6,検波出力レベル判定部7などを備えて、350MHzから400MHz等の帯域の電波を受信し、目標電波の受信時に音や光等の表示による報知を行う構成にする。受信モニタする帯域の周波数はカーロケーターシステム,車両速度測定のための連絡無線などに割り当てられている。検波出力レベル判定部7では検波出力レベルが所定範囲にあるときは目標電波であると判定し、検波出力レベルが所定以上では目標電波ではなく誤受信であると判定し、報知制御部4は判定結果が誤受信の際は報知動作の停止指示を出力する動作を行う。
(もっと読む)
電波信号報知装置
【課題】 受信部の回路構成は従来と同様にコストを抑えた典型的な構成を採ることができ、送信所の近辺など強電界地域での誤動作を防止することができる電波信号報知装置を提供すること
【解決手段】 受信部1,信号レベル検出部2,演算部3,報知部4,スキャン周波数設定部5,記憶部6などを備えて、180MHzから400MHz等の帯域の電波を受信し、目標電波の信号レベルが所定以上のときに報知信号を出力する構成にする。受信モニタする帯域の周波数はカーロケーターシステム,所轄系デジタル無線などに割り当てられている。スキャン周波数設定部5の指示により目標電波の近辺の周波数についても受信を行い、演算部3では、目標電波の信号レベルが所定以上であるとき、近辺の周波数での信号レベルも所定以上である場合に、受信検知ありの判定を破棄する判定動作を行う。
(もっと読む)
スイング速度測定装置及びゴルフクラブのヘッドスピード測定装置
【課題】 ボール等の影響も少なくどのような使用環境であっても比較的正確な測定結果を安定的に得ることができるゴルフクラブのヘッドスピード測定装置を提供すること
【解決手段】 ドップラー信号を出力するドップラーセンサと、ドップラーセンサによって出力されたドップラー信号に基づく当該ドップラー信号の周期に関するデータを複数個蓄積可能なメモリ22と、ドップラーセンサによって出力されたドップラー信号に基づき当該ドップラー信号の周期に関するデータを得てメモリへの蓄積を行い、メモリに蓄積されたデータ群に基づきスイング速度を算出する速度算出手段と、備える。そして、周期は一周期であり、周期に関するデータは、一周期の時間に関するデータとした。
(もっと読む)
静電容量式近接センサ装置
【課題】 雨滴や降雪などには反応しないで誤検出を起こさず、車両用の車外の障害物の検出に好ましく適用できる静電容量式近接センサ装置を提供すること
【解決手段】 検出領域に静電容量(電界)を発生するための電極1a,1bと、各電極へ接続して静電容量の変化を検出する検出回路2a,2bと、を2組備える。電極1a,1bは上下に2つを並べて配置し、雨滴が順次に伝わり落ちるようにする。電極1a,1bの2つの間には接地電極4を設けて接地する。検出回路2a,2bの出力を判定回路3へ取り込み、判定回路3では、検出回路2a,2bの出力の何れか一方のみが検出有りでは外乱の検知であると判定し、何れか一方が検出有り後に復帰して続いて他方が検出有り後に復帰した場合にも(時間差に応じて)外乱の検知であると判定する判定動作を行う。
(もっと読む)
車載用目標物検出装置
【課題】 記憶させる位置情報を少なくしつつ簡易なアルゴリズムで位置情報に基づいて検出した目標物が現在の走行する道路種別(高速道路/一般道路)と同じ道路上に存在するものか否かを弁別することができる車載用目標物報知装置を提供すること
【解決手段】 自車の位置を検出するGPS受信部10と、目標物の位置を記憶する目標物位置情報記憶部21と、目標物が設置されているのと同じ道路か否かを判定するための事前確認位置を記憶する事前確認位置情報記憶部22と、各記憶部に格納されたそれぞれの位置情報と、位置検出手段の出力から目標物の存在を判定する報知判定部30と、報知判定部の出力から、目標物の存在を報知する報知部40と、を備える。報知判定部は、自車の位置から所定距離内でありかつ車両の進行方向の所定角度範囲内に目標物が存在する場合に目標物が存在するものとする第1の判定条件と、事前確認位置を通過したこととする第2の判定条件と、を満たしたときに目標物が存在するものと判定する。
(もっと読む)
連続波方式マイクロ波センサによる距離の測定方法
【課題】 対象物体までの距離が1波長を越えていても、越えていないときと同様に高精度で測定が行える連続波方式マイクロ波センサによる距離の測定方法を提供すること
【解決手段】 測定系に複数のマイクロ波センサ1,2,3を備えて、対象物体10へ向けて3つのマイクロ波f1,f2,f3を照射し、そしてビート信号は2つの組み合わせを合成し、それらビート信号に対して演算処理を行う。測定に係る距離dが1波長λAを越えないときは、2周波f1,f2でのビート信号について位相差φAを算出し、その位相差φAから距離dを確定する。測定に係る距離dが1波長λAを越えるときには、組み合わせが異なる2周波f1,f3でのビート信号の演算処理から超過距離RBを求め、他方の2周波f1,f2による超過距離RAとの残差eが最小となる整数nA,nBを求めて、2つの超過距離RA,RBが同一値となる真値Rを確定する。
(もっと読む)
高速フーリエ変換と加算平均による速度の測定方法
【課題】 ランダム雑音を減らすことができ、移動体の速度を高い精度で確実に決定できる高速フーリエ変換と加算平均による速度の測定方法を提供すること
【解決手段】 移動体からの散乱波は所定時間毎のサンプリングにより数値列d1へ変換し、数値列d1には所定サンプル数について高速フーリエ変換を行って周波数スペクトルを求め(s1)、次に周波数スペクトルから最大ピークおよび候補となる複数の周波数を選出し(s2)、選出した周波数についてそれぞれの該当周期により数値列d1を分割して(s3)、当該分割単位で加算した後に平均値を求める同期加算平均の処理を行い(s4)、当該同期加算平均による第2数値列d2にはそれぞれ所定サンプル数について高速フーリエ変換を行って第2周波数スペクトルを求め(s5)、それら第2周波数スペクトルから最大ピークを選出し、この最大ピークの周波数が速度の真値であると決定する。
(もっと読む)
車両用傾斜判定装置
【課題】 加速度センサーを用い、精度がよく温度変化による誤動作を抑制できる車両用傾斜監視装置を提供すること
【解決手段】 傾斜角度検出装置1と温度検出装置2の出力に基づき制御装置3が傾斜判定をする。制御装置は、同時点の両検出装置の出力を、加速度センサー出力基準値と温度センサー出力基準値として記憶する比較値記憶部11と、傾斜角度検出装置の出力と加速度センサー出力基準値の差が閾値以上のときに傾斜有りと判定する傾斜判定部14と、両出力基準値を更新する基準値設定部12とを有する。基準値設定部は、温度変化がある場合に、前記差が温度変化量から想定される変動量よりも小さい場合には温度変化に基づく差として出力基準値を更新し、前記想定される変動量よりも大きい場合には、温度変化と傾斜による変化が重畳しているとして想定される変動量に基づいて出力基準値を更新する。
(もっと読む)
マイクロ波検出器
【課題】 身近な行動エリア(ローカルエリア)の設定を容易に行なうことができると共に、ユーザの利用状況に応じて更新できるマイクロ波検出器を提供すること
【解決手段】 マイクロ波の受信に伴い警報を発するマイクロ波検出部10と、車両の位置情報を求めるGPS受信部20と、マイクロ波検出部の動作の有無を判定する動作判定部40と、エリアローカルエリア内に車両が存在するときにマイクロ波検出器の動作を制御するローカルエリア内報知制御部30とを備える。制御部30は、動作が開始(電源ON)の時の位置情報の履歴情報を求め、利用度の多い2地点を基準点とし、その2点間の距離に一定の数値を乗算してその値より自車位置と2点との距離の和が少ない場合にローカルエリア内にあると判断する。
(もっと読む)
201 - 210 / 238
[ Back to top ]