
株式会社国際電気通信基礎技術研究所により出願された特許
171 - 180 / 905
脳情報出力装置、ロボット、および脳情報出力方法
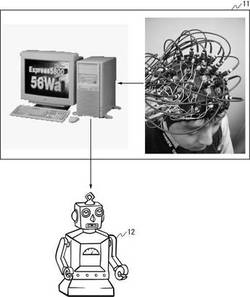
【課題】従来、精度高く意図を検出できなかった。
【解決手段】ユーザが一の意図を示した際の当該ユーザの第一脳活動データを取得する第一脳活動データ取得部と、前記ユーザが前記一の意図を示した際の当該ユーザの第二脳活動データを取得する第二脳活動データ取得部と、第一脳活動データから、前記示された一の意図が、複数の意図識別子のうちの一の意図識別子に対応する意図である第一確率を意図識別子ごとに算出する第一確率算出部と、第二脳活動データから、前記示された一の意図が、複数の意図識別子のうちの一の意図識別子に対応する意図である第二確率を意図識別子ごとに算出する第二確率算出部と、前記第一確率、および前記第二確率とを用いて意図識別子を取得する意図決定部と、前記意図識別子を出力する出力部とを具備する脳情報出力装置により、精度高く意図を検出できる。
(もっと読む)
意図判別情報取得装置、脳情報出力装置、ロボット、および意図判別情報取得方法

【課題】意図の検出の精度が十分ではなかった。
【解決手段】脳・機械インタフェースによる機械の操作前に行う学習データを取得するための実験を、以下の2つのセッションに分割する。第一段階はトレーニングセッション、第二段階はブラッシュアップセッションである。トレーニングセッションでは、操作する機械を使わずにデータを取得し、そのデータを用いて、意図判別アルゴリズムのパラメータを仮に設定する。その後、ブラッシュアップセッションでは、機械を動作させる環境において、仮に設定したパラメータを使って、データを取得し、次にそのデータを含めて意図判別アルゴリズムのパラメータを本設定する。以上のように、2つのセッションにより、学習データを取得することにより、意図検出の精度を向上させる。
(もっと読む)
脳情報出力装置、ロボット、および脳情報出力方法
【課題】従来、学習データを取得するための長時間かかっていた。
【解決手段】ユーザの意図を識別する情報である意図識別子と、当該意図識別子で識別される意図の元にユーザが一連の行為を行った際に当該ユーザの脳から取得された一のデータである学習データを構成する一部分である複数の部分学習データの各々から、抽出された1以上の特徴量である複数の学習特徴量群とを対に有する意図判別情報を、2以上格納し得る意図判別情報格納部と、脳活動データを取得する脳活動データ取得部と、脳活動データから入力特徴量群を取得する特徴量群取得部と、前記入力特徴量群に対応する意図識別子を、意図判別情報格納部に格納されている2以上の意図判別情報から取得する意図識別子取得部と、前記意図識別子を出力する意図識別子出力部とを具備する脳情報出力装置により、短時間の準備でも、ユーザの意図を精度高く取得できる。
(もっと読む)
脳情報出力装置、ロボット、および脳情報出力方法
【課題】精度の高い意図検出ができなかった。
【解決手段】ユーザの意図を識別する情報である意図識別子と、当該意図識別子で識別される意図の元にユーザが一連の行為を行った際に当該ユーザの脳から取得された一のデータである学習データから、抽出された1以上の特徴量である学習特徴量群とを対に有する2以上の意図判別情報であり、取得日が異なる学習データから抽出された2以上の各学習特徴量群を有する2以上の意図判別情報を格納し得る意図判別情報格納部と、ユーザから脳活動データを取得する脳活動データ取得部と、脳活動データから1以上の特徴量である入力特徴量群を取得する特徴量群取得部と、入力特徴量群に対応する意図識別子を、2以上の意図判別情報から取得する意図識別子取得部と、取得した意図識別子を出力する意図識別子出力部とを具備する脳情報出力装置により、精度の高い意図検出ができる。
(もっと読む)
動作計測装置および動作計測プログラム
【課題】右足先を回転させたり平行移動させたりする運転者のペダル踏み替え動作を正確に判定することができる動作計測装置および動作計測プログラムを提供する。
【解決手段】動作計測装置10は、コンピュータ12を含み、コンピュータ12は、運転者の右足先に装着された足部センサ16から送信される角速度データおよび加速度データを受信する。コンピュータ12は、角速度データが示す角速度が閾値A以上または閾値D以下になると、当該角速度の時間変化の波形を正方向の波形と負方向の波形とに分けて積分する。一方の積分値がほぼ0である場合には、それらの積分値から運転者の右足の踏み替え動作を判定する。しかし、両方の積分値がほぼ0である場合やいずれも積分値がほぼ0でない場合には、角速度が閾値A以上または閾値D以下である時間帯Tにおける加速度データが示す加速度の時間変化を2階積分した積分値から運転者の右足の踏み替え動作を判定する。
(もっと読む)
無線装置
【課題】受信信号における非希望信号を正確に抑制可能な無線装置を提供する。
【解決手段】信号抑制回路3は、希望信号と非希望信号とを含む受信信号をBPF2から受ける。そして、信号抑制回路3は、その受信信号をフーリエ変換して周波数領域の信号に変換し、周波数領域の信号において希望信号の成分をゼロに設定して非希望信号を推定する。その後、信号抑制回路3は、その推定した非希望信号が遅延回路32から出力された受信信号に含まれる非希望信号の極性を反転した信号になるように、その推定した非希望信号の位相を制御し、その位相を制御した非希望信号を用いて受信信号に含まれる非希望信号を抑制する。AGC4は、信号抑制回路3からの受信信号を増幅し、AD変換器5は、AGC4の出力信号をアナログ信号からデジタル信号に変換し、復調器6は、デジタル信号からなる受信信号を復調する。
(もっと読む)
道案内ロボット
【構成】道案内ロボット(10、100)は複数の文を発話して利用者に道を案内するものである。そして、時間決定手段(62、S19、S69)は文の内容を利用者が把握するために必要な時間を決定する。また、発話手段(62、72、54、S35、S41、S85、S97)は文の発話の完了後に、時間決定手段が決定した時間の後で次の文を発話する。
【効果】道案内ロボットによる道案内の内容を利用者が正しく充分に把握することができる。
(もっと読む)
無線装置およびそれを備えた無線通信システム
【課題】他の無線システムへの干渉を回避しながらチャネル選択情報を効率的に共有可能な無線装置を提供する。
【解決手段】アクセスポイント1は、2402〜2481MHzの帯域中に存在する16個の共通制御チャネルから制御情報の送受信に用いる共通制御チャネルを周波数ホッピング方式によって定期的に選択し、その選択した共通制御チャネルが未使用である場合に、データ通信用に用いるデータチャネルを選択するためのデータチャネル選択情報を移動端末11へ定期的に送信する。そして、アクセスポイント1は、移動端末11がデータチャネル選択情報を用いて決定したデータチャネルを移動端末11から定期的に受信してデータチャネルを共有する。その後、アクセスポイント1および移動端末11は、そのデータチャネルを用いて時分割でデータフレームを送受信する。
(もっと読む)
加速度センサ
【課題】3軸方向の加速度を検出することが可能でかつ容易に製造可能であるとともに小型化、低コスト化および周波数応答性の向上が可能な加速度センサを提供する。
【解決手段】 加速度センサ300は、複数のセンサ素子201,202,203,204により構成されるセンサ素子群200を含む。センサ素子201,202,203,204は共通の基板101上に異なる向きに形成される。センサ素子201,202,203,204はピエゾ抵抗素子を有するカンチレバーCL1,CL2,CL3,CL4を含む。カンチレバーCL1,CL2,CL3,CL4は基板101の一面から斜め上方に湾曲する。基板101は基台110上に取り付けられる。基板101上に空間が確保されるように基台110にケーシング120が取り付けられる。
(もっと読む)
視野推定装置、視野推定方法、コンピュータプログラム及び記録媒体
【課題】視認されるべき視野を総合的に評価して安全運転に役立てることが可能な視野推定装置、視野推定方法、並びに前記視野推定装置を実現するためのコンピュータプログラム及び該コンピュータプログラムを記録した記録媒体を提供する。
【解決手段】乗員の頭部位置から車両1のバックミラー11、ドアミラー12,13及び前方窓を介して乗員の視線方向に夫々視認されるべき視野が空間的に分布する範囲を算出し、算出した夫々の範囲に時間を遡ると共に指数関数的に減少する重みを付与して時系列的に積算する。各ミラーについて鏡面の方向、頭部位置及び夫々のミラーの位置に基づいて夫々のミラーに対する頭部位置の虚像位置にある仮想視点を算出し、各ミラーの鏡面の方向及び視線方向に基づいて仮想視点から夫々のミラーを見通す方向となる仮想視線方向を算出し、仮想視点から仮想視線方向に夫々のミラーの鏡面を見通す範囲内で視認されるべき視野を算出する。
(もっと読む)
171 - 180 / 905
[ Back to top ]