
日立オートモティブシステムズ株式会社により出願された特許
111 - 120 / 2,205
ブレーキ装置
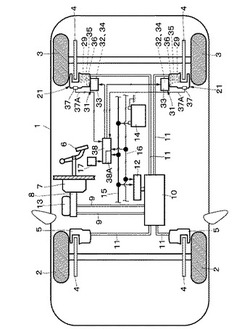
【課題】車両の駐車場所がスプリットμ路面であるか否かを判定できるブレーキ装置を提供する。
【解決手段】ディスクブレーキ21を構成する取付部材に歪センサ37を設ける。歪センサ37は、取付部材の歪に基づいて、ディスクブレーキ21のブレーキ力を検出する。駐車ブレーキ用コントローラ38は、駐車ブレーキの作動時に、左側の後輪3のディスクブレーキ21のブレーキ力と左側の後輪3のディスクブレーキ21のブレーキ力とを比較し、これら左,右のブレーキ力Bに差がある場合に、左側の後輪3と右側の後輪3とがスプリットμ路面の勾配路に駐車されていると判定する。
(もっと読む)
経路案内システム

【課題】現況交通情報に基づく経路に準じた近似経路を速やかに出力する。
【解決手段】経路案内システムは、時刻毎の交通情報に基づく複数の交通状況を複数の交通状況パターンに分類する交通状況分類手段と、複数の交通状況パターンの各々に対応して、複数の地点間のすべての組み合わせについての経路探索演算を行い、経路探索演算により得られる全ての経路を経路データベースに格納する経路データベース生成手段と、複数の交通状況パターンの中から、現況交通情報に類似した交通状況パターンを出力する交通状況照合手段と、交通状況照合手段により出力された交通状況パターンに基づき、経路データベースを参照して、出発地から目的地までの経路を検索し出力する経路情報検索手段とを備える。
(もっと読む)
内燃機関の冷却装置
【課題】 燃焼効率を十分に改善可能な内燃機関の冷却装置を提供すること。
【解決手段】 エンジンブロックを備えた内燃機関と、前記エンジンブロックの歪みを検出する歪みセンサと、前記歪みセンサにより検出された歪み量が所定値以下となるように、前記エンジンブロック内の冷却通路内に冷却水を循環制御する冷却手段と、を備えた。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
リニアソレノイドモジュール
【課題】リニアソレノイド制御回路、詳しくはドライバ回路をリニアソレノイドと一体化した場合の、機能診断、及びフェールセーフが確実に実施できるようにする。
【解決手段】リニアソレノイドモジュールに、リニアソレノイドバルブと、リニアソレノイドバルブを駆動制御するドライバ回路と、ドライバ回路を制御するマイコンと、外部からの指令値を受信するインターフェース回路と、ソレノイドバルブの温度を検出する温度検出回路と、リニアソレノイドバルブに流れる電流を検出する電流検出回路とを備える。
(もっと読む)
ブレーキ制御装置
【課題】電動モータを駆動源とするブレーキ制御装置において、電源の負担を軽減しつつ、イグニッションスイッチがオフの状態でも迅速に作動可能にする。
【解決手段】車両電源Eの供給電力により、マスタ圧制御装置3によって入力ロッド7の移動量に基づき、電動モータ20を制御し、ボール−ネジ機構25を介してプライマリピストン40を推進してマスタシリンダ9でブレーキ液圧を発生させる。マスタシリンダ9のブレーキ液圧を入力ピストン16により入力ロッド7を介してブレーキペダル100にフィードバックする。マスタ圧制御装置3は、イグニッションスイッチのオフ等のシステム終了条件が成立したとき、電源遮断制御を実行して、車両電源Eを遮断し、補助電源12から必要な電力を供給し、補助電源12に蓄えられた電力によりブレーキ制御を継続する。
(もっと読む)
電動機の制御装置、制御システム及び制御方法
【課題】電動機のトルクを、安定して高い精度で制御できる、電動機の制御装置、制御システム及び制御方法を提供する。
【解決手段】永久磁石同期電動機の回転軸に、半導体歪みセンサの出力を無線送信する無線送信装置を取り付ける一方、電動機本体に無線送信装置からの送信を受信する無線受信装置を設ける。電動機を駆動制御する制御装置は、無線送受信装置を介して歪みセンサの出力を入力し、電動機のトルクを検出し、トルク検出値とトルク指令値との偏差に基づき、電動機のPWM制御信号を演算して出力する。これにより、電動機における電流とトルクとの相関が、永久磁石の温度変化や劣化によって変動しても、電動機のトルクを高精度に制御できる。
(もっと読む)
減衰力調整式緩衝器
【課題】減衰力調整式緩衝器において、ピストンロッドに作用する横力を考慮して正確な減衰力制御を行なうことができるようにする。
【解決手段】コントローラCにより、各種センサの検出信号に基づき、車両の走行状態に応じて減衰力調整式緩衝器1の減衰力調整機構6のソレノイド7に制御電流を供給して、減衰力をリアルタイム制御することにより、車両の操縦安定性及び乗心地を向上させる。減衰力調整式緩衝器1のピストンロッド5に歪センサ19を装着する。コントローラCにより、歪センサ19の検出信号に基づき、ピストンロッド5に作用する横力を演算し、この横力によって生じるピストロッドとロッドガイドとの間の摩擦力に基づき、ソレノイド7への制御電流を補正することにより、正確な減衰力制御を行なう。
(もっと読む)
シリンダ装置の製造方法
【課題】油圧緩衝器等のシリンダ装置において、シール部材が固着されたディスクバルブの平面度のばらつきを低減して安定した減衰力特性を得る。
【解決手段】筒型の油圧緩衝器において、一側にリング状の弾性シール部材15が固着されたディスクバルブ14を製造する際、板材から打抜き加工されたディスクバルブ14を下型41の一側が凸となるように湾曲れた底部にセットする。型締めして円筒型部44によってキャビティCを形成すると共に、押え金45でディスクバルブ14を押圧して一側に凸となるように成形する。この状態で通路46からキャビティCにゴム材料を充填して加硫、硬化させ、弾性シール部材15を成形してディスクバルブ14に固着させる。このとき、ゴム材料の収縮により、ディスクバルブ14は、湾曲が減少する方向に変形するので、平面度のばらつきを低減して、安定した減衰力特性を得ることができる。
(もっと読む)
走行制御装置
【課題】ドライバがアクセルペダルを踏み間違えた場合に、意図していない加速を防止するとともに、踏み間違いではなく、真にドライバが加速の意思を持つ場合は、確実に車両を加速させる走行制御装置を提供する。
【解決手段】入力された自車両情報又は外界認識情報に基づいて、加速要求装置の踏み間違いをしたか否かを判断する踏み間違い判断手段と、踏み間違い判断手段にて踏み間違いと判断された場合、一定の踏み込み量で一定の加速要求装置の反力となる第1のモードから、加速要求装置の反力がその一定の反力よりも小さい反力となる第2のモード、又は、加速要求装置の反力及び開度を固定にする第3のモードに変更するモード変更手段と、減速要求が入力された場合、変更された第2のモード又は第3のモードから第1のモードに変更するモード解除手段と、を有する。
(もっと読む)
111 - 120 / 2,205
[ Back to top ]