
Fターム[2B041DB06]の内容
農業機械一般(連結、尾輪、PTO等) (4,416) | 位置調整装置(尾輪等)の構成又は取付け (66) | 支持杆又は付加器具 (21) | 支持杆 (17)
Fターム[2B041DB06]に分類される特許
1 - 17 / 17
歩行型耕耘機
【課題】
本発明は、培土作業、運搬作業、耕耘作業を切り換え易くすることを課題とする。
【解決手段】
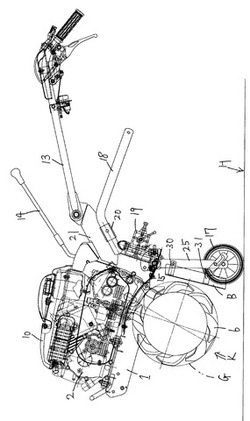
機体に操作ハンドル(13)と耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、左右一対の転輪(17)を設けた歩行型耕耘機において、培土板(B)の培土面を平面状に形成し、培土板(B)の後方に転輪(17)を設け、培土板(B)と転輪(17)は連結板(31)を介して連結する構成とし、畝を形成する培土作業時には培土板(B)の下端部及び転輪(17)が圃場に接地する構成とし、運搬作業時には運転者が操作ハンドル(13)を押し下げると、転輪(17)が接地状態で、耕耘部(K)及び培土板(B)の下端部が圃場から上方に離間する位置となることを特徴とする。
(もっと読む)
歩行型管理機

【課題】抵抗棒、尾輪、及び畝立て器を機体に常時装着した状態にすることができ、抵抗棒と尾輪と畝立て器の使い分けを、簡易に、しかも迅速にできる歩行型管理機を提案する。
【解決手段】機体10の後部に取り付けられるとともに、後端に機体10の前後方向に延びた筒部22cを有する支持部20(取付部22)と、一端に抵抗棒30aが形成され、他端に尾輪31・31が支持され、中間部に支持軸34が設けられて、支持軸34が支持部20の筒部22cに回転可能に嵌装される回転フレーム30と、回転フレーム30を支持部20に対して相対回転不能かつ前後移動不能とする係止部材40と、を具備する歩行型管理機において、回転フレーム30の尾輪31・31側の端部に、畝立て器50を取り付けた。
(もっと読む)
歩行型農作業機
【課題】機体の下側に配置された左右方向の耕耘ロータリの後方に、後方斜め下方に延出された抵抗棒を備え、機体のヘッドアップ作動を、効率的に抑制可能な歩行型農作業機を提供することを課題とする。
【解決手段】本発明は、機体5下側の左右方向の耕耘ロータリ4後方に配置されて後方斜め下方に傾斜した抵抗棒21と、機体5の後方斜め上方に突設された操向ハンドル7とを備え、抵抗棒21の延出側端部21aを土中に挿入させた状態で耕耘ロータリ4を前進側に回転駆動させることにより、耕耘作業を行う歩行型農作業機であって、圃場に接地させた作業ポジションP2で機体5に固定させることが可能な接地輪22を、抵抗棒21と耕耘ロータリ4との間における抵抗棒21寄り箇所に設け、機体5の姿勢を水平方向に向けた際に接地輪22下端の上下位置を、抵抗棒21の上記延出側端部21aよりも低く設定した。
(もっと読む)
歩行型管理機
【課題】アタッチメントとして提供されている従来の培土器を使用することなく、うね立て作業を可能にすると共に、培土板を取り外すことなく、通常の耕耘作業を可能にする。
【解決手段】機体から左右外側方に延出する車軸9に、複数の耕耘爪10を備える車軸耕耘式の歩行型管理機1であって、機体の後部に、圃場に接触して走行抵抗を発生させる抵抗棒13用の取付部(作業機連結ヒッチ12)と、機体移動時に機体後部を支える移動尾輪21用の取付部とを備え、該移動尾輪21用の取付部を、移動尾輪21を接地高さに保持する下降姿勢と、移動尾輪21を非接地高さ保持する上昇姿勢とに回動変姿自在な移動尾輪ブラケット20で構成すると共に、該移動尾輪ブラケット20に、うね立て用の培土板24を設ける。
(もっと読む)
歩行型管理機
【課題】抵抗棒と移動車輪を作用姿勢と非作用姿勢とに容易に切り換えることが可能な歩行型管理機を提供する。
【解決手段】エンジンを有する機体と、該エンジンの駆動力で動力伝達機構を介して耕耘軸を回転させ、該耕耘軸に備えた耕耘爪3の回転により耕耘する歩行型管理機1において、前記耕耘爪3の後方に抵抗棒7を設け、該抵抗棒7の中途部に移動車輪8を取り付けると共に、抵抗棒7を耕耘姿勢と走行姿勢に変更すべく抵抗棒軸芯に対して回動自在に構成し、抵抗棒7を、該抵抗棒7を取付けるヒッチ部9と移動車輪8の取付けステー13の間において、該抵抗棒7の中途部を耕耘作業状態で下方に折り曲げると共に、耕耘作業状態で抵抗棒7を使用した際に、抵抗棒7の上面側に移動車輪8が位置するように移動車輪8の取付けステー13を抵抗棒7に取り付けたものである。
(もっと読む)
歩行型管理機
【課題】ゴムたれにより簡単に畝立て作業ができる歩行型管理機を提供する。
【解決手段】尾輪体30は、耕耘装置11から後方に突設される補助フレーム31と、補助フレーム31から下方へ突設される第一支持杆32と、前記第一支持杆に対して、回動可能に取り付けた第二支持杆33と、前記第二支持杆に回転可能に取り付けられる尾輪34と、前記第二支持杆を前記第一支持杆に対して、任意の回動位置に保持する保持手段50とを具備し、前記耕耘装置と前記尾輪体との間に、該耕耘装置を後方から覆うゴムたれ15を具備し、前記第二支持杆を、前記尾輪が前記耕耘装置の最下位置よりも上方に位置するように保持手段により保持した状態で、前記尾輪体を構成する第一支持杆は、前記ゴムたれの左右中央部に当接可能とし、前記ゴムたれの左右両側により、前記耕耘装置で掘り起こされた土壌を左右に押して、畝立て作業を可能とした。
(もっと読む)
歩行型管理機
【課題】歩行型管理機において、揚土作業時に、ハンドル逆姿勢の操向ハンドルを持ち上げながら歩行型管理機を前進させて、耕耘機構の浮き上がりを防止する作業をなくす。
【解決手段】本願発明に係る歩行型管理機は、機体1に搭載された動力源7と、前記機体1の下方に前後に並べて配置された左右一対の走行部2及び耕耘機構3と、前記機体1の上部に向き変更可能に設けられた操向ハンドル4とを備える。前記機体1のうち前記走行部2を挟んで前記耕耘機構3と反対側の端部には、地面に接地する起立姿勢と地面から離れる収容姿勢とに姿勢変更可能に構成された補助輪体40を取り付ける。補助輪体40は、上端側を回動支点として機体1に上下回動可能に取り付けられたスタンド部41と、スタンド部41の下端側に回転可能に設けられた補助輪42とを備える。
(もっと読む)
歩行型管理機
【課題】歩行型管理機において、揚土作業時に、ハンドル逆姿勢の操向ハンドルを持ち上げながら歩行型管理機を前進させて、耕耘機構の浮き上がりを防止する作業をなくす。
【解決手段】本願発明に係る歩行型管理機は、機体1に搭載された動力源7と、前記機体1の下方に前後に並べて配置された左右一対の走行部2及び耕耘機構3と、前記機体1の上部に向き変更可能に設けられた操向ハンドル4とを備える。前記機体1のうち前記走行部2を挟んで前記耕耘機構3と反対側の端部には、前記耕耘機構3を進行方向前側にして進行する際に接地して前記走行部2と共に前記機体1を支持する補助輪体40を昇降調節可能に取り付ける。
(もっと読む)
歩行型管理機
【課題】本発明の課題は、機体の移動と耕耘作業の切替えに手間がかからない歩行型管理機を提供することにある。
【解決手段】走行部2の後方に耕耘装置11を設け、この耕耘装置11の後部に尾輪体30を取り付ける歩行型管理機1において、前記尾輪体30は、前記耕耘装置11から後方に突設される補助フレーム31と、前記補助フレーム31に左右方向に回動可能に取り付けられる第一支持杆32と、前記第一支持杆32に前後方向に回動可能に取り付けられる第二支持杆33と、前記第二支持杆33に回転可能に取り付けられる尾輪34と、前記第一支持杆32を前記補助フレーム31に対して任意の回動位置に保持する第一保持手段40と、前記第二支持杆33を前記第一支持杆32に対して任意の回動位置に保持する第二保持手段50と、を具備する。
(もっと読む)
歩行型耕耘機
【課題】 作業ロータ後方の抵抗棒と尾輪を切替えるために、両者の上下回動間にリンク機構を設けて、上下相反する方向へ回動する形態では、リンク作動関節部にがたを生じ易く、ロータの駆動回転によって前進する駆動力に抗するように接地による抵抗を与える抵抗棒や、尾輪は、共に安定した接地状態を維持して耕耘作業推進、乃至走行できることが必要である。
【解決手段】 耕耘爪1を有したロータ軸2を軸装の機体フレーム3の後側に、尾輪4を有した尾輪アーム5と、抵抗棒6を有するソケットアーム7とを、各アーム軸8、9周りに上下回動可能に設け、これら両アーム軸8、9部間をギヤ10、11で噛合させて、上下相反する方向へ回動するように連動構成する。
(もっと読む)
管理機の尾輪
【課題】管理機の作業状態に応じ、単尾輪タイプの尾輪装置と双尾輪タイプの尾輪装置とを其々用意することなく、常時機体に装着でき、かつ作業状態に応じて選択的に用いることができるようにする。
【解決手段】管理機1の走行輪15の前方または後方に装着する尾輪40であって、尾輪40は管理機本体または作業機に取り付けるための尾輪支持体32と、尾輪支持体32に取り付けられる左右一対の車輪34・34と、車輪34・34を尾輪支持体32に回転自在に支持するための車輪支持軸33とを備え、尾輪支持体32は下部に後面視門形の尾輪アーム35を備え、尾輪アーム35の左右の縦アーム35b・35b間に車輪支持軸33を着脱可能に横架するとともに、車輪34・34は、ホイール部34aと、ホイール部34aの中心側面より突設したボス部34bを備え、車輪支持軸33上に左右一対の車輪34・34を着脱可能、かつ、回転自在に支持可能に設けた。
(もっと読む)
歩行型農作業機
【課題】
昇降尾輪の操作性を向上させる。
【解決手段】
走行変速とロータリ変速を行なう操作レバーと操作レバーと昇降車輪との間に昇降調節連動機構を介設すると共に、操作レバーの操作位置が路上走行の前進一速、前進二速、後進への操作に連動して昇降尾輪を下降位置とし、操作レバーの操作位置が耕耘位置へ操作した時には、昇降尾輪を上昇位置とした。
(もっと読む)
作業機
【課題】 トラクタにオートヒッチで連結される作業機を、オートヒッチに連結される前の状態である待機姿勢に、ゲージ輪をスタンドとして利用することで簡単な操作で保持できるように工夫する。
【解決手段】 機枠に左右方向の回動軸心X廻りに回動自在に支持された回動部材64に設けた第1アーム65の先端側に支持部材68の上部を枢支連結すると共に該支持部材68の下部にゲージ輪70を取り付け、前記回動部材64に設けた第2アーム66と機枠とにわたって設けた高さ調整手段73によって第2アーム66を回動部材64と一体回動させることにより第1アーム65が回動部材64と一体回動してゲージ輪70の高さが調整可能とされ、第1アーム65の第2アーム66に対する回動軸心X回りの相対位置を、作業姿勢でゲージ輪70の高さを調整可能な作業位置と、ゲージ輪70を下降させることで作業機1を待機姿勢に保持可能なスタンド位置とに位置変更可能とする。
(もっと読む)
装着変換装置
【課題】特殊3点リンク用のロータリ作業機に装着することで、標準3点用のロータリ作業機として転用可能な装着変換装置を提供する。
【解決手段】トラクタ2より取外した特殊3点リンク用のロータリ作業機1に対して、第1ブラケット31、第2ブラケット41を主要部品とする装着変換装置5を装着することで、標準3点リンク用のロータリ作業機として使用することができる。さらに、装着変換装置5の下部にはゲージホィール56が伸縮可能に支持されており、ロータリ作業機の作業面高さを調整可能とされている。
(もっと読む)
ロータリ耕耘装置
【課題】ロックピンをツールバー取付フレームの調節ピン孔に挿入し取付フレームを押圧固定することにより、支持フレーム内で取付フレームの抜け止め及びガタつきの発生を防止することができるロータリ耕耘装置を提供する。
【解決手段】耕耘部15の上方に設けた支持フレーム26を中空のパイプとなして、ツールバー29の取付フレーム27をスライド自在に内嵌すると共に、上記支持フレーム26に進退自在に支持したロックピンを、取付フレーム27に穿設した複数の調節ピン孔の何れかの孔に挿入して、ツールバー29の前後動を規制すると同時に、取付フレーム27を支持フレーム26の内周面の一側に向けて押圧して、ツールバー29のガタつきを阻止する構成とした。
(もっと読む)
歩行型管理機
【課題】 機体1に搭載されたエンジン5と、耕耘機構3と、機体を下方から支持する左右一対の車輪2,2と、機体1の上部後端に設けられた操向ハンドル4とを備え、車輪2,2と耕耘機構3にエンジン5からの動力を伝達する構成の歩行型管理機において、機体の前進動に対して耕耘機構3のロータリ爪9を逆転させる逆転耕耘作業時に、機体1の沈み込み現象は防止することと、ロータリ爪9での耕耘深さを適宜調節することとを同時に実行できるようにする。
【解決手段】 機体1又は耕耘機構3に、地中に突き刺すことで機体1の前進動に抵抗を付与する抵抗棒12を昇降調節可能に取り付ける。抵抗棒12には、地面に接地する作用姿勢と非作用姿勢とに姿勢変更可能に構成された尾輪体15を取り付ける。
(もっと読む)
歩行型農作業機
【課題】
前側昇降車輪の操作性を向上させる。
【解決手段】
走行変速とロータリ変速を行なう操作レバーと前側昇降車輪との間に昇降調節連動機構を介設すると共に、操作レバーの操作位置が走行変速位置である前進又は後進への走行変速操作に連動して前側昇降車輪の機体に対する支持高さを最下降位置とし、操作レバーの操作位置が耕耘位置へ操作した時には、前側昇降車輪の機体に対する支持高さを最下降位置より上昇位置とした。
(もっと読む)
1 - 17 / 17
[ Back to top ]