
Fターム[2B043BB01]の内容
農業機械一般(操向) (6,001) | 農業機械の作業別の種類 (591) | トラクタ (77)
Fターム[2B043BB01]に分類される特許
21 - 40 / 77
作業車輌の前輪操向装置
【課題】複数の操舵角、操舵方向、及び操舵速度を検出できるものでありながら、簡単な構成とすることが可能な作業車輌の前輪操向装置を提供する。
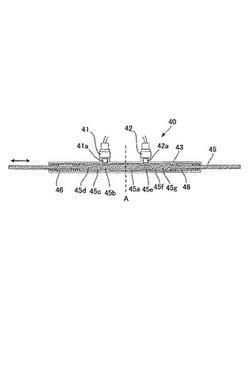
【解決手段】前輪操向装置20は、大径部45a,45c,45f及び小径部45b,45d,45e,45gを有する軸状カム部材45と、該軸状カム部材45が貫通配置された位置検出シリンダ43と、該位置検出シリンダ43に固定された左検出スイッチ41及び右検出スイッチ42とを有する操舵位置検出装置40を備えて構成されている。軸状カム部材45は、操向操作に基づいて移動し、中立状態から最大操舵角となるまでの間で、左検出スイッチ41及び右検出スイッチ42に操舵角に応じた複数回の状態変化を出力させることにより複数段階の操舵角を検出する。また、これら複数の操舵角間の変位時間から、マイコンが演算することで操舵速度を検出する。
(もっと読む)
作業車輌の前輪操向装置

【課題】配置するスイッチを少ない個数とするものでありながら、操舵方向及び複数段階の操舵角を検出することが可能な作業車輌の前輪操向装置を提供する。
【解決手段】前輪操向装置20は、大径部45a,45c,45f及び小径部45b,45d,45e,45gを有する軸状カム部材45と、該軸状カム部材45が貫通配置された位置検出シリンダ43と、該位置検出シリンダ43に固定された左検出スイッチ41及び右検出スイッチ42とからなる操舵位置検出装置40を備えて構成されている。軸状カム部材45は、操向操作に基づいて移動し、中立状態から最大操舵角となるまでの間に、操舵角に応じた複数回の状態変化を出力させることができ、操舵方向及び複数段階の操舵角を検出することができる。
(もっと読む)
車軸駆動装置
【課題】車軸駆動装置のケースは、一対の出力軸、差動機構、モータをともに収納するので、形状が複雑である。また、上下二つのケース半部同士も共通の形状とすることができない。そのため、なおもコスト高になる。
【解決手段】車軸駆動装置10にて、両出力軸4L・4Rを収納するケース70を設け、ケース70は、略同一のケース半部の一対を、互いに上下左右反転した状態で左右に結合してなり、接合した両ケース半部は、それぞれで各出力軸4L・4R及び入力軸162を軸受しており、左右各ケース半部の外側には、それぞれ各モータ21a・22aを装着し、各モータ21a・22aのモータ軸161・160をモータ連結用継手部分に連結した。
(もっと読む)
農業用トラクタ
【課題】農業用トラクタの各種設定操作の繁雑さを解消する。
【解決手段】走行ポジション(P1)では、前記車体の走行形態を「二駆」状態とし、且つ作業機昇降制御を切に設定し、耕耘ポジション(P4)では、前記車体の走行形態を「四駆」状態とし、且つ前記作業機昇降制御を入りに設定すると共に、前輪増速制御、オートリフト制御またはオートブレーキ制御を夫れ夫れ単独で選択できる設定具(9)を設け、前記設定器(9)を前記耕耘ポジション(P4)に操作すると、該設定具(9)により選択設定された前輪増速制御、オートリフト制御、又はオートブレーキ制御を強制的に入とするように構成し、かつ前記走行ポジション(P1)に切り替えたときの前記作業機昇降制御を切に維持した状態で「四駆」を設定可能に設けた。
(もっと読む)
作業車の制御装置
【課題】圃場の状況や作業の内容に合わせて、精度よく車体の状態を作業状態から非作業状態に切り換えることができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、操縦ハンドル6の操舵速度がしきい値以上で、且つ、前輪2の切れ角が所定角度以上であると、車体1の状態を作業状態から非作業状態に切り換える車体状態切換手段51,53を備えて、車速検出手段63により検出した車速が速くなる程、しきい値Kを高く設定してある。
(もっと読む)
作業車の制御装置
【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
作業車輌
【課題】複数のコントローラを、それぞれの制御対象となる操作手段又は作動手段に近接して配置した作業車輌を提供する。
【解決手段】トラクタは、主変速操作スイッチを備えた副変速レバーの下方側に、変速を制御する変速コントロールユニットC2を有し、サイドスイッチパネル18の下方部分に、作業機の昇降を制御する昇降コントロールユニットC3を有し、表示パネル15の裏側に、走行情報及び作業情報を表示する表示パネル15を制御する表示コントロールユニットC4を有し、表示パネル15の機体前方側に備えられ、これらコントロールユニットに通信回線によって接続されると共に操作レバー・スイッチや各種センサ等からの入力情報に基づいて指令信号を発する操作コントロールユニットC1を有して構成されている。これにより、各コントロールユニットと操作手段及び作動手段とを近接して配置することができる。
(もっと読む)
移動車両の直進誘導システム
【課題】運転者の負担を軽減し、熟練者でなくても高能率・高精度な作業ができる移動車両の直進誘導システムを提供する。
【解決手段】この移動車両の直進誘導システムは、移動車両搭載部1、移動車両が直進走行すべき走路前方の延長線上に設置される遠方目標部2を備える。移動車両搭載部1はカメラ部11、カメラ部11からの画像を処理し走行情報を出力する画像処理部12、走行情報に基づき移動車両を制御する車両制御部14,操向制御機構15を有する。遠方目標部2はカメラ部11の撮像周期と最大露光時間の合計時間以上で撮像周期の2倍以下の時間の点灯と消灯とを繰り返す。画像処理部12は現フレームと前フレーム及び、現フレームと前々フレームにおいて第1,第2の遠方目標部候補画素を抽出し、第1,第2の遠方目標部候補画素を統合し、統合した遠方目標部候補画素に対し遠方目標部2の位置検出を行い、検出結果に基づき走行情報を生成する。
(もっと読む)
トラクタ誘導装置
【課題】 初心者から熟練者、特に近年増加傾向にある高齢者や女性のような農業従事者にも、安全且つ容易に畝筋に沿っての正確なトラクタを運転、操作可能とする新技術を提供する。
【解決手段】 農業用トラクタTの運転席S前方のボンネットB上面で運転者の前方視線E上となる位置に、走行案内とすべき畝9に照準可能な縦棒上端型または後上向き傾斜姿勢棒上端型の照門3、または、経緯線60,61を張設した照準枠6の少なくとも何れか一方を、着脱自在で自立、仮固定可能となるようにした照門器2と、同トラクタTのボンネットB前端付近で同じく運転者の前方視線E上となる位置に、走行案内とすべき左右隣接畝90,91または畝合92,93への照準用とする左右幅調節機構81を組み込んでなる水平照星棒80を、着脱自在で自立、仮固定可能となるようにした照星器8との組合せからなるトラクタ誘導装置1である。
(もっと読む)
乗用型耕耘機
【課題】耕耘用のローターの昇降に伴って各部が動いたり各部の間隔が変化したときに、動力伝達装置がそれらに素早く追従して動くことができるようにしてローターの迅速な昇降操作を可能とした乗用型耕耘機を提供する。
【解決手段】乗用型耕耘機(A)は、前輪と後輪の間に設けられ昇降動可能な耕耘用のローターと、ローターを昇降動させる昇降操作装置(8)と、ローターを駆動する耕耘駆動系(7)と、前輪を駆動する走行駆動系(5)とを有し、走行駆動系(5)と耕耘駆動系(7)には動力伝達装置(4)で原動機(E)の動力が伝えられ、走行駆動系(5)と耕耘駆動系(7)は一体となって回動軸(56)を中心として回動可能で、動力伝達装置(4)は基端がユニバーサルジョイント(41)を介し動力取出軸(13)に接続されている伸縮可能なドライブシャフト(42)と、ドライブシャフト(42)から伝えられる動力を走行駆動系(5)と耕耘駆動系(7)に分配する動力分配軸とを備えている。
(もっと読む)
作業車両
【課題】安全性、旋回性能および作業環境を向上させたトラクタなどの作業車両を提供する。
【解決手段】キャビン6とミッションケース23との間に防振部材10を有し、ステアリングホイール9の操向および操向量を、車両上下方向から車両前後方向に変換するクランク機構111を有するリンク機構100を備え、このリンク機構100によって旋回用HSTポンプ72を操作し、車両を旋回させ、クランク機構111を、ミッションケース23側部に備える。また、クランク機構111の、弾性部材112を内挿する左アーム111cの接続部111dの両端部に、前後ロッド105を接続する。
(もっと読む)
作業車両
【課題】2ポンプ2モータ方式の走行用静油圧式無段変速装置に連係する手動式の走行操作具を備えたクローラトラクタ等の作業車両において、機体に連結した作業機アタッチメントを操作(操縦)しながら、機体を移動走行させるといった複合的な操作を容易に行えるように、手動式の走行操作具と同じ機能を有する簡素且つ安価な構成の足動式の走行操作具を設ける。
【解決手段】走行用静油圧式無段変速装置21に連係する手動式の走行操作具8を、2つの油圧ポンプ20L,20Rの斜板制御用サーボ機構S1,S2の吐出量制御バルブV1、V2に連係させると共に、前記手動式の走行操作具8とは別に足動式の走行操作具32L,32Rを設け、該足動式の走行操作具32L,32Rを、前記斜板制御用サーボ機構S1,S2の斜板コントロール回路中に作用させて、当該足動式の走行操作具32L,32Rによっても走行操作を可能となした。
(もっと読む)
草刈り機
【課題】草刈り機は他の農業機械に比べ比較的スピードの出せる設定になっており作業時に高速走行した場合、舵取りによっては機体が不安定になり横転の危険性すらある。また移動時であっても不整地走行する場合がほとんどであり高速走行中に急ハンドルが切られた場合非常に危険であった。この舵取りに関わる安全装置として高速走行中の急な進行方向変更や旋回時の速度制限制御を実現する。
【解決手段】HST調整軸を回動調整するロッド、又はワイヤーと、HSTレバー、又はHSTペダルとの連結部の一部に連結部と連動する連結体を連結し、且つその連結体をアクチュエータにより作動させることにより、HSTレバー又はペダルの操作を牽制し、HST調整軸を制御し速度制御できる構成にした。更には、ステアリング機構にステアリングセンサを配設し、ステアリングホイールが略旋回走行方向位置にある時はアクチュエータを作動させる構成にした。
(もっと読む)
作業車
【課題】ロータリ耕耘装置を下降位置から上昇させる際に形成される耕耘跡の発生を防止でき、圃場での農作業の作業性を向上させることのできる作業車を実現する。
【解決手段】走行車体1の後部に装備されたロータリ耕耘装置Fを昇降駆動する昇降機構8,9と、操作指示を出す操作指示手段37と、を備え、操作指示手段37からの操作指示に基づいて、ロータリ耕耘装置Fを予め設定された中間位置から上昇位置まで上昇させる速度よりも低速で、ロータリ耕耘装置Fを下降位置から中間位置まで上昇させるように、昇降機構8,9を駆動させる耕耘装置自動上昇手段を備えて、作業車を構成する。
(もっと読む)
作業車
【課題】隣接耕合せの作業性を向上することができ、耕耘作業の作業性を向上することができる作業車を実現する。
【解決手段】走行車体1の向きを検出する向きセンサ39,40と、走行車体1に右又は左の旋回指令を入力する旋回指令入力部37と、旋回指令入力部37によって旋回指令が入力されると、向きセンサ39,40の検出結果に基づいて、旋回指令入力部37により入力された右又は左に前輪3を操向操作し予め設定された旋回目標角度に走行車体1を自動旋回させる自動旋回制御手段と、旋回目標角度を変更調節可能な旋回目標角度調節具42とを備えて、作業車を構成する。
(もっと読む)
作業車
【課題】無理なくステアリングレシオを変更することができ、農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】作業車にステアリング装置12の入力軸18aとステアリングハンドル6のハンドル操作軸6aとの間に配設されたステアリング差動機構20を備え、このステアリング差動機構20を、入力軸18aに固定された第1ギア21と、第1ギア21と歯数の異なるハンドル操作軸6aに固定された第2ギア22と、入力軸18a又はハンドル操作軸6aに回動自在に支持されたキャリア23と、キャリア23の自転軸23aに回動自在に支持された回動部材27と、回動部材27に固定されかつ第1ギア21及び第2ギア22のそれぞれに咬合された第1遊星24及び第2遊星ギア25と、キャリア23を回動可能な電動モータ30と、を備えて構成する。
(もっと読む)
作業車
【課題】運転者に違和感を与えることなく、無理なく走行車体を自動操向することができ、農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】作業車に、ステアリングハンドル6に連結されたハンドル操作軸6aによる第1操作変位と、自動操向制御量に基づいて駆動する駆動軸30aによる第2操作変位とを入力操作変位として入力するとともに、第1操作変位と第2操作変位の間の差動変位を出力操作変位としてステアリング装置12の入力軸18aに出力するステアリング差動機構20を備える。
(もっと読む)
作業車両
【課題】暗夜や積雪時などで障害物が視認できないときに車体の走行位置をGPS受信装置で受信して、障害物判断処理を実行する制御手段を具備した作業車両を提供する。
【解決手段】地図情報を格納するデータベースD1と、前記地図情報に基づく作業機の位置検出手段及び位置表示手段とを有する作業車両において、作業車両の走行時に、現在の走行位置と、データベースD1に格納された障害物地図情報と比較し、障害物が近づくと警報を発する。また、前記警報時に、障害物の種類と位置を表示する。
(もっと読む)
乗用型作業機
【課題】旋回制御モードの設定時にブレーキ装置が作動する場合の不具合を解消することができる乗用型田植機を提供すること。
【解決手段】作業車両1が旋回内側の後輪7のクラッチIを切って動作で旋回する時には昇降用リンク装置2を作動させて自動的に苗植付装置3を上昇させ、前記旋回後に直進する時には自動的に苗植付装置3を苗植付け位置に下降させる旋回制御モードを設定しているときに、旋回内側の後輪7のブレーキ装置Jが作動すると、旋回制御モードにおける昇降用リンク装置2による苗植付装置3を苗植付け位置に下降させる作動を禁止して苗植付装置3の破損などを防止する制御を行う制御装置170を設けた乗用型田植機である。
(もっと読む)
トラクタ
【課題】大幅な部品の共通化及びコストダウンを可能とする操作力連係手段40を備えたトラクタを提供することを目的とする。
【解決手段】操作力連係手段40は、支持ブラケット42と、連結ロッド46と、操作アーム48とからなり、支持ブラケット42が、ミッションケース13上方を機体左右方向に亘ってデフロック操作部材12を支持する。デフロック操作部材12が、オペレータの踏み込み操作によって回動すると、連結ロッド46、操作アーム48を介して、連結部材49が回動し、連結部材49が回動することによってシフトアームがデフロックスリーブをディファレンシャルギアと噛合させ、デフロック手段を作動させる。
(もっと読む)
21 - 40 / 77
[ Back to top ]