
Fターム[2B043DA15]の内容
農業機械一般(操向) (6,001) | 操向操作装置の構成、配置又は取付け (514) | 作業機の作動と操向操作具との関連 (46)
Fターム[2B043DA15]に分類される特許
21 - 40 / 46
農作業機
【課題】走行機体に動力を供給する動力源の駆動及び走行機体に連結してある作業機の作動を制御する複数の制御方法を適宜選択し、操作性及び利便性を向上させることができる農作業機を提供する。
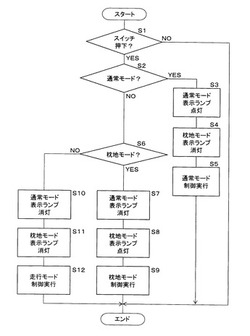
【解決手段】耕耘機制御装置は前記作業モード切替スイッチが押下されたことを示す信号が入力され(ステップS1)該スイッチにより選択された作業モードが通常モードであるときは(ステップS2)所定のランプを点灯させて通常モードでの制御を行う(ステップS3、S4、S5)。選択された作業モードが枕地モードであるときは(ステップS6)所定のランプを点灯させて枕地モードでの制御を行う(ステップS7、S8、S9)。選択された作業モードが走行モードであるときは(ステップS6)所定のランプを消灯させて走行モードでの制御を行う(ステップS10、S11、S12)。
(もっと読む)
トラクタ

【課題】トラクタに装着した作業機を、旋回操作に関連して自動的に昇降する作業機自動昇降制御装置は、旋回操作が終了したことが検出されると、自動下降機構が働いて作業機を自動的に下降するから、操作の手間が省けて便利である反面、危険性の伴う課題がある。
【解決手段】この発明は、トラクタに昇降自由に作業機が設けられ、前輪の切れ角が設定値以上になったとき、前記作業機を上昇する自動上昇機構が設けられ、前記前輪の切れ角が設定値未満になると、前記作業機を下降する自動下降機構が設けられている旋回時のトラクタにおいて、上昇移動が手動操作によって行われた作業機は、旋回操作の終了が判断された後であっても、自動下降機構による自動下降ができない構成としたトラクタの構成とする。
(もっと読む)
作業車
【課題】ロータリ耕耘装置を下降位置から上昇させる際に形成される耕耘跡の発生を防止でき、圃場での農作業の作業性を向上させることのできる作業車を実現する。
【解決手段】走行車体1の後部に装備されたロータリ耕耘装置Fを昇降駆動する昇降機構8,9と、操作指示を出す操作指示手段37と、を備え、操作指示手段37からの操作指示に基づいて、ロータリ耕耘装置Fを予め設定された中間位置から上昇位置まで上昇させる速度よりも低速で、ロータリ耕耘装置Fを下降位置から中間位置まで上昇させるように、昇降機構8,9を駆動させる耕耘装置自動上昇手段を備えて、作業車を構成する。
(もっと読む)
コンバイン
【課題】デバイダの位置調整を行うための操作を簡潔にして、操作性を向上させたコンバインを提供する。
【解決手段】走行機体2の前方に、複数のデバイダ21、22、23を有する刈取り部20を昇降自在に支持し、前記走行機体2を操向操作手段15により操向操作してなる、コンバイン1において、最も外側にある前記デバイダ23を、幅方向に移動自在に支持すると共にアクチュエータにより幅方向位置を調整自在とし、前記操向操作手段15の操向レバーに、前記コンバイン1の走行方向を微調整する右方向微調スイッチ16を備え、該右方向微調スイッチ16により前記アクチュエータを操作して、前記デバイダ23の位置を調整するようにした。
(もっと読む)
乗用型作業機
【課題】旋回制御モードの設定時にブレーキ装置が作動する場合の不具合を解消することができる乗用型田植機を提供すること。
【解決手段】作業車両1が旋回内側の後輪7のクラッチIを切って動作で旋回する時には昇降用リンク装置2を作動させて自動的に苗植付装置3を上昇させ、前記旋回後に直進する時には自動的に苗植付装置3を苗植付け位置に下降させる旋回制御モードを設定しているときに、旋回内側の後輪7のブレーキ装置Jが作動すると、旋回制御モードにおける昇降用リンク装置2による苗植付装置3を苗植付け位置に下降させる作動を禁止して苗植付装置3の破損などを防止する制御を行う制御装置170を設けた乗用型田植機である。
(もっと読む)
簡易乗用作業車
【課題】 作業部材を牽引することができる作業車であって、簡単に使用することができ、畝間や枕地が狭い圃場等においても操作性及び取扱性の良い、簡易乗用作業車を提供する。
【解決手段】 自動走行機体2と、該走行機体2で牽引される作業部材4を取り付けるための作業部材取付部3と、作業者Mが座席11で前記作業部材取付部3を作業休止時地上高H1と作業時地上高H2に昇降操作するための昇降操作装置6と、前記走行機体2の後部に配設された左右一対の持ち上げ用ハンドル7,7を備えている。そして、前記作業部材4を取り付けた状態において、前記左右一対の持ち上げ用ハンドル7,7によって前輪8を支点として後輪9,9が地面から浮き上がるまで前記走行機体2の後部を作業者Mが持ち上げられるように重量設定及び重量配分がなされている。
(もっと読む)
作業機
【課題】 本発明は、作業機において、機体の旋回状況を正確に判断できるようにすることを課題とする。
【解決手段】 エンジンからの動力を変速する伝動装置と該伝動装置からの出力で駆動する左右の車輪を備え、さらに車輪への伝動を各別に入り切りする左右のサイドクラッチを設け、旋回内側の車輪の回転数を検出に基づいて、旋回状況を判断する装置を設けた。
また、作業装置の作動を入切するクラッチを設け、該クラッチが切りになる操作に起因して旋回内側の車輪の回転数の検出を開始し、前記回転数が設定値になると前記クラッチにより作業装置を自動的に作動させる。
また、作業装置を昇降させる昇降手段を設け、旋回内側の車輪のサイドクラッチを切る操作に起因して旋回内側の車輪の回転数の検出を開始し、該回転数が所定の回転数になると昇降手段により作業装置を自動的に下降させる。
(もっと読む)
移植機
【課題】植付行程終了後に走行機体を自動旋回させるにあたり、直進走行中のスリップなどに起因する距離計測誤差を排除し、旋回開始タイミングのばらつきを可及的に小さくする。
【解決手段】ステアリングホイール24の操作に応じて走行機体1を操向するステアリング機構と、走行機体1に昇降自在に連結される植付部3と、該植付部3に対する動力供給を入切する植付クラッチとを備える乗用田植機において、ステアリング機構をアクチュエータの駆動力で作動させるステアリング作動機構27と、該ステアリング作動機構27を制御する制御装置33とを備えると共に、該制御装置33は、植付部3の上昇操作に基づいて植付けの終了を判断すると共に、植付終了判断後の経過時間に基づいて旋回開始タイミングを判断し、該旋回開始タイミング判断に応じてステアリング機構を自動的に旋回制御する。
(もっと読む)
作業車の前輪増速駆動装置
【課題】前輪増速装置を装備した作業車において、旋回時に作業機上昇と前輪増速が同時に作動してしまい、圃場端の耕耘の終了部が斜めになることがあった。
【解決手段】ステアリングハンドル57の回動角を検知する手段と、作業機昇降制御手段と、前輪増速切換手段と、これらの制御手段を備え、ステアリングハンドル57を直進位置から設定角度以上切ると、作業機を上昇させ、前輪を増速駆動するようにした作業車において、前記作業機の上昇動作と前輪を増速駆動する動作との間に所定の時間差を設けた。
(もっと読む)
移植機
【課題】旋回中のスリップなどに影響を受けることなく、一定のタイミングで植付クラッチを自動的に入操作し、各行程の植付開始位置を精度良く揃える。
【解決手段】走行機体1に連結される植付部3と、該植付部3への動力供給を入切する植付クラッチとを備える乗用田植機(移植機)において、走行機体1の左車輪回転及び右車輪回転を検出し、その検出信号に基づいて植付クラッチを自動的に入操作する制御装置9を備え、該制御装置9は、左右車輪8の回転差が所定以上となることに基づいて旋回開始を判断し、旋回開始判断後、左右車輪8の回転差が所定以下となることに基づいて旋回終了を判断し、さらに、旋回終了を判断してから所定距離走行後に植付クラッチを自動的に入操作する。
(もっと読む)
移植機
【課題】次回の旋回方向を正確に判断すると共に、判断した旋回方向に対応しない左右車輪の回転差を無視し、旋回開始タイミングの誤認を防止する。
【解決手段】植付部3から左右外側方に選択的に振り出され、次植付行程に走行基準線を引くマーカ9L、9Rと、走行機体1の左後輪回転及び右後輪回転に基づいて走行機体1の旋回を判断する制御装置24とを備えた移植機において、前記制御装置24は、マーカ9L、9Rの振り出し方向に基づいて次回の旋回方向を判断すると共に、判断した旋回方向に対応する左右後輪8の回転差に基づいて旋回開始を判断する。
(もっと読む)
作業車の走行制御装置
【課題】 直進走行及び旋回走行を良好に行うことができ、しかも、直進走行時において一時的に大きな走行駆動力が必要となる場合に良好な直進走行を行うことが可能となる作業車の走行制御装置を提供する。
【解決手段】 直進が指令されると直進用の無段変速装置7の出力を左右一対の走行装置1R,1Lの夫々に伝達し、右旋回が指令されると直進用の無段変速装置7の出力を左側の走行装置1Lに伝達し且つ旋回用の無段変速装置8の出力を右側の走行装置1Rに伝達し、左旋回が指令されると直進用の無段変速装置7の出力を右側の走行装置1Rに伝達し且つ旋回用の無段変速装置8の出力を左側の走行装置1Lに伝達し、走行駆動力の増大が指令されると、直進用の無段変速装置7の出力及び旋回用の無段変速装置8の出力を左右一対の走行装置1R,1Lの夫々に伝達して、旋回用の無段変速装置8を直進用の無段変速装置7と同じ又は略同じ速度になるように制御する。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6を設けた走行車両1に苗移植作業装置3を昇降自在に装着した乗用型苗移植機において、左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回モード中に、機体の前進速度が所定速度よりも速い場合または左右前輪6の操向操作速度が所定速度よりも速い場合には、上記苗移植作業装置3を上昇させる速度を速くする制御装置170を設けた乗用型苗移植機。
(もっと読む)
コンバイン用操作レバー構造
【課題】 昇降用切換弁、操向用切換弁及び可変リリーフ弁を単一の操作レバーで操作可能とし、且つ、操向用切換弁及び可変リリーフ弁の作動制御を行う際の動作と、昇降用切換弁の作動制御を行う際の動作との干渉を防止しつつ、可及的に小型化及び構造簡略化を図る。
【解決手段】 操向基準軸線回り揺動自在な操向用従動部材に、昇降基準軸線回り相対回転自在且つ操向基準線回り相対回転不能に昇降用従動部材を連結させる。操作レバーの車輌左右方向への揺動操作によって前記昇降用従動部材を介して前記操向用従動部材が操向基準軸線回りに揺動し、車輌前後方向への揺動操作によって昇降用従動部材が昇降基準軸線回りに揺動するように、該操作レバーを昇降用従動部材に連結する。操作レバーの車輌前後方向に関する揺動方向を検出する昇降検出機構は、操向用従動部材に支持されたセンサー部材と、昇降用従動部材に支持された被検出体とを有する。
(もっと読む)
作業車
【課題】進行方向左右に配置される車輪を備え、更に操向手段の操作によって操向される車輪への伝動を各別に入切する左右のサイドクラッチを設け、旋回内側の車輪の回転数の検出に基づいて、旋回時の苗植付部の昇降を自動的に行なわせる旋回連動制御装置を設けた乗用田植機において、苗植付部の不適切な昇降を防止する。
【解決手段】旋回走行しうる乗用田植機に対して昇降可能な苗植付部を設け、乗用田植機には苗植付部の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで順次行なう自動旋回制御装置を備え、乗用田植機の走行速度が通常作業速度よりも低速の低速基準値以下の状態で自動旋回制御装置を作動可能にする牽制手段を設ける。
(もっと読む)
作業車輌
【課題】 各種の自動制御機能の入切設定を一括して操作可能にするものでありながら、複数の農作業動作にも対応することが可能な作業車輌を提供する。
【解決手段】 農作業中に入設定すべき制御グループAの自動制御機能110を入設定にすると共に、農作業状態に合せて選択すべき制御グループBの自動制御機能120のそれぞれを個別に入切設定し得る作業モード101と、制御グループA及び制御グループBの自動制御機能110,120を全て切設定にする走行モード100と、制御グループA及び制御グループBの自動制御機能110,120のそれぞれを個別に入切設定し得るユーザ設定モード102とを設け、これらモードの切換えを選択操作し得るモード操作手段を設ける。このモード選択により、入切設定の一括操作を可能にするものでありながら、複数の農作業動作にも対応する。
(もっと読む)
根菜類収穫機の根菜類列検知装置
【課題】 センサの調整条件を極力減らせる簡易な構造にすることで茎葉等の夾雑物の絡まりを防止するとともに、畝からの接地負荷に対する追従性を高めることにより、根菜類列の検知精度を高めることができる根菜類収穫機の根菜類列検知装置を提供する。
【解決手段】 接触アーム3は、畝から受ける上方向の押圧力を吸収し得る弾性力を備えているとともに、所定の下向傾斜角で左右の内側方向に延設された接触先端部32と、この接触先端部32から左右の外側方向に湾出された湾曲部31とを有しており、接触先端部32が根菜類の頭側部に当接した場合、その当接力により湾曲部31を左右の外側方向に回動させてその回動変位を変位センサ5Aに伝達し、接触先端部32が畝に接触して下方から押圧された場合、その押圧力を湾曲部31の弾性力によって吸収して変位センサ5Aに伝達しないように構成されている。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
作業車の走行変速構造
【課題】 作業車の走行変速構造において、エンジンに掛かる負荷に応じて走行用の変速装置が低速側及び高速側に操作されるように構成した場合、作業条件に応じて機体の走行速度を適切に設定することができるように構成する。
【解決手段】 エンジン1に掛かる負荷に応じて走行用の変速装置10を、所定の範囲を備えた自動変速範囲で低速側及び高速側に操作する自動変速手段を備える。自動変速範囲の全体を低速側及び高速側に変更可能に構成する。
(もっと読む)
コンバイン
【課題】湿田や軟弱地での操向性能を向上させると共に、条合せ時などの旋回方向の微調節を行う場合に、操向方向の微調整を容易に可能とさせることができるコンバインを提供する。
【解決手段】走行用油圧式無段変速機構と旋回用油圧式無段変速機構とを差動機構を介し走行部に連結させて、機体の走行変速及び旋回を行うようにしたコンバインにおいて、旋回用油圧式無段変速機構を操作する操向ハンドルを設けると共に、操向ハンドルの右側部に、旋回方向微調整用のフィットステアリングを設け、操向ハンドルを手で握った状態で指先によるフィットステアリングの操作を可能に構成した。
(もっと読む)
21 - 40 / 46
[ Back to top ]