
Fターム[2B043EC12]の内容
農業機械一般(操向) (6,001) | 検出量の伝達又は処理 (391) | 検出量の処理と制御 (323) | 計測、学習又は記憶 (36)
Fターム[2B043EC12]に分類される特許
1 - 20 / 36
走行車両
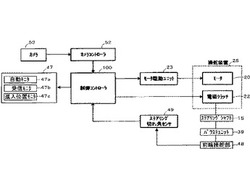
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
田植機

【課題】 本発明の課題は、植付部を適正に稼動することができる田植機を提供することにある。
【解決手段】 転向車輪と後輪とを備えて旋回走行可能な水田作業車の旋回動作信号と、同水田作業車に昇降可能に搭載されて均平用のフロートを備えた植付部の高さ位置信号とを受け、機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部を備える田植機において、後輪を駆動する後輪伝動部(16)には、後輪車軸(3a)へ減速伝動する減速伝動部と、該減速伝動部よりも伝動上手側に設けた走行距離を算出するための回転センサ(16s)とを備え、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
苗移植機
【課題】
畦際作業の際に、線引きマーカが一側に連続して作動し、畦や圃場に植え付けた苗に線引きマーカが接触することを防止可能な苗移植機を提供する。
【解決手段】
畦際での植付作業を検知する畦際検知部材76を設け、畦際検知部材76が畦際での植付作業を検知すると、苗植付部4を昇降させてもマーカ切替装置72の線引きマーカ68の作動方向を切り替えない構成とすると共に、畦際検知部材76が畦際での植付作業を検知すると線引きマーカ68の昇降回数を記憶する作動回数検知部材77を設け、作動回数検知部材77の検知回数が所定回数未満であるときは苗植付部4を昇降させてもマーカ切替装置72の作動方向を切り替えない構成とすると共に、作動回数検知部材77の検知回数が所定回数以上になると線引きマーカ68が圃場に線を形成しないようにマーカ切替装置72の作動を停止する構成とする。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記旋回量微調節手段の操作量に対応させて変更可能に構成した。旋回量微調節手段による走行機体の旋回量の調節量は、旋回量微調節手段の操作量に対応させて変更可能に構成しているため、オペレータは、旋回量微調節手段の操作量を変更することで、簡単に旋回量微調節手段による走行機体の旋回量の調節量を変更することができる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記走行機体の速度に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、旋回量微調節手段による走行機体の旋回量の調節量を走行機体の速度に対応させて変更可能に構成しているため、かかる調節量を走行機体の速度に対応させて変更することで、種々の状況に即応させて走行機体の曲がり具合を変更することができる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記操向手段の操作量に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、調節量を操向手段の操作量に対応させて変更することで、操向手段による大雑把な旋回操作と旋回量微調節手段による補足的かつ微細な旋回操作を一体密接的に関連づけることができる。
(もっと読む)
施肥装置
【課題】圃場の形状・寸法にかかわらず、効率性の高い走行経路の設定ができるとともに、走行経路の設定を行いながら連続的に施肥できるようにする。
【解決手段】第1設定点P1と第2設定点P2とを結ぶ基準線L0を設定する制御と、基準線L0と対向する平行な第2枕地走行経路L12を設定する制御と、第2枕地走行経路L12上に第3設定点P3を設定する制御と、第3設定点P3を設定することにより第2枕地走行経路L12の位置を設定する制御と、設定された第2枕地走行経路L12の位置に基づいて、第1枕地走行経路L11と第2枕地走行経路L12の間の距離を算出するとともに、第1枕地走行経路L11と第2枕地走行経路L12の間の施肥範囲B1中で施肥されてない範囲を算出し、枕地走行経路L1と内側走行経路L2を備えた走行経路Lを設定する。
(もっと読む)
農作業車の旋回開始位置設定装置及び旋回開始位置設定方法
【課題】農作業車が枕地において確実に旋回できる旋回開始位置を自動的、且つ確実に設定する。
【解決手段】GPSによる位置情報に基づいて、農作業車100の走行起点とする原点Pを設定する原点設定部1と、原点Pから直線状の基準線L1を設定する規準線設定部3と、原点Pからの移動距離を計測する移動距離計測部4と、農作業車100の実際の走行距離を計測する走行距離計測部5と、計測された移動距離と走行距離との差を算出する距離差算出部6と、農作業車100が旋回していると判定する旋回判定部7と、農作業車100の旋回が判定された位置に旋回判定点P2を設定する旋回判定点設定部8と、規準線L1上の任意の位置に直線基準点P3を設定する直線基準点設定部9と、旋回判定点P2から規準線L1に戻って、規準線L1上の距離差がない最終地点を検出し、この最終地点を旋回開始位置P4として設定する旋回開始位置設定部10とを備えた。
(もっと読む)
移植機
【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
コンバイン
【課題】電動モータを駆動源とするコンバインにおいて、従来の旋回操作方法を変更することなく、急旋回や緩旋回等の旋回を行えるようにして、圃場作業における操縦性を高める。
【解決手段】左右のクローラ走行装置(3R,3L)を変速可能な左右の電動モータ(5R,5L)で夫々駆動すると共に該クローラ走行装置(3R,3L)を制動する左右のブレーキ(6R,6L)を設け、操縦席に立設する操向レバー(21)の左右傾倒角度に応じて該操向レバー(21)を傾倒した側の電動モータ(5R又は5L)の回転速度を減速させ、操向レバー(21)の傾倒角度が設定角度に達した場合にブレーキ(6R又は6L)を作動させて傾倒側のクローラ走行装置(3R又は3L)の回転を停止させる構成とする。
(もっと読む)
農作業車両運行管理システム
【課題】 農作業車両の運行状況を即時的に、空間的に確認することができる農作業車両運行管理システムを提供することにある。
【解決手段】 農作業車両に搭載された移動体装置から送信された位置情報を受信し、地図データベースから取得した地図データの表示画面に重ねて表示する手段を備えることを特徴とする。また、移動体装置から送信された位置情報と、地図データベースから取得した圃場データとの重なりの条件によって、表示画面に作業状況を色分け表示する手段をさらに備えることを特徴とする。また、移動体装置から送信された位置情報の日付と、地図データベースから取得した圃場データと圃場データに格納された作業予定日の比較結果に基づき、表示画面に圃場データを色分け表示する手段を備えることを特徴とする。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
乗用型苗移植機
【課題】 操向用の左右前輪と左右後輪を設けた走行車両に苗移植作業装置を昇降自在に装着し、左右線引きマーカと該左右線引きマーカの作動を停止させるマーカ作動切替え操作具とを設けた乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて苗移植作業装置が下降する指令を出力する自動旋回制御を行なうと共に、旋回時の左右後輪の回転数を比較し、該回転数の多い左右一方側の線引きマーカを旋回後に線引き作用状態に切り替える制御装置を設けたことを特徴とする乗用型苗移植機とした。
(もっと読む)
乗用型田植機
【課題】作業車において旋回の終了を適切に検出することができるように構成する。
【解決手段】機体の走行距離を検出する走行距離検出手段と、操向操作自在な前輪の直進位置からの操向角度を検出する操向角度検出手段とを備え、車輪2の回転数に基づいて機体の走行距離Gと、操向操作自在な車輪1の直進位置A1からの操向角度Aとにより、作業行程からの旋回開始に基づいて、旋回開始前の機体の進行方向での旋回中の機体の位置Y2を検出する。
(もっと読む)
乗用型田植機
【課題】 本発明の課題は、旋回時の苗植え付けなどの諸作動を自動的に行わせることができるようにすることである。
【解決手段】 機体上に設けたエンジンと、機体の進行方向に向かって左右に設けた左右前輪及び左右後輪と、該左右前輪を操向操作する操向操作具と、左右後輪のそれぞれの伝動軸に設けたエンジン駆動力を伝達・非伝達するクラッチと、操向操作具に連動して前記左右いずれかのクラッチを作動させる連動ロッド(180,180)とを備えた走行車両を設け、該走行車両には昇降用リンク装置を介して苗植付装置を装着した乗用型田植機において、操向操作具による操向角度の検出により旋回中であると判断すると、後輪の伝動軸の回転数を検出し、該回転数が第一の設定値を超えると苗植付装置を下降し、前記回転数が第二の設定値を超えると苗植付装置を作動させる制御装置を設けた。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
水田作業車
【課題】水田作業車において、旋回終了位置が検出されると作業装置を作業状態に操作するように構成する場合、作業装置の作業状態への操作が適切に行われるようにする。
【解決手段】機体の旋回開始からの機体の走行距離を検出する走行距離検出手段56、又は機体の旋回開始からの経過時間を検出する経過時間検出手段57を備える。走行距離検出手段56の検出値が設定距離に達するまでに、又は経過時間検出手段57の検出値が設定時間に達するまでに、作業装置操作手段55による作業装置の作業状態への操作が終了しなければ、作業装置操作手段55の作動を停止させる停止手段58を備える。
(もっと読む)
1 - 20 / 36
[ Back to top ]