
Fターム[2B043EC15]の内容
農業機械一般(操向) (6,001) | 検出量の伝達又は処理 (391) | 検出量の処理と制御 (323) | 指定、選択又は切替え (33)
Fターム[2B043EC15]に分類される特許
1 - 20 / 33
苗移植機
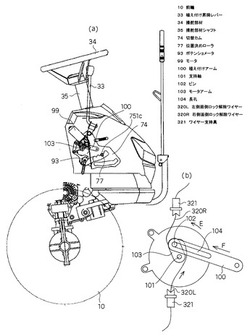
【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
苗移植機

【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
苗移植機
【課題】
畦際作業の際に、線引きマーカが一側に連続して作動し、畦や圃場に植え付けた苗に線引きマーカが接触することを防止可能な苗移植機を提供する。
【解決手段】
畦際での植付作業を検知する畦際検知部材76を設け、畦際検知部材76が畦際での植付作業を検知すると、苗植付部4を昇降させてもマーカ切替装置72の線引きマーカ68の作動方向を切り替えない構成とすると共に、畦際検知部材76が畦際での植付作業を検知すると線引きマーカ68の昇降回数を記憶する作動回数検知部材77を設け、作動回数検知部材77の検知回数が所定回数未満であるときは苗植付部4を昇降させてもマーカ切替装置72の作動方向を切り替えない構成とすると共に、作動回数検知部材77の検知回数が所定回数以上になると線引きマーカ68が圃場に線を形成しないようにマーカ切替装置72の作動を停止する構成とする。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
作業車両
【課題】
本発明の課題は、旋回時の車速が速く設定されている場合にあっても、植付作業部をタイミング良く下降させて畦に対する干渉や空植えを防止することにある。
【解決手段】
この発明は、操向ハンドルの左右旋回操作によって前輪が左又は右に操向操作されると、旋回外側の後輪の回転速度に対して旋回内側の後輪の回転速度が所定速度以下になったとき旋回内側のサイドクラッチを強制的に「入」にして旋回内側の後輪を所定の回転量だけ強制駆動する旋回制御手段(TC)を備えた作業車両において、機体旋回時に作業部を上昇させ、機体旋回開始後、所定角度旋回すると作業部を所定位置に下降させる作業部昇降制御手段(UD)を備え、車速が速く設定されている場合には、作業部の下げ速度を増速制御する下降速度制御手段(DV)を設けてあることを特徴とする。
(もっと読む)
コンバイン
【課題】可変容積型油圧ポンプ及び可変容積型油圧モータを有する走行用HSTと機械式の多段変速装置とが走行系伝動経路に直列的に介挿され、前記走行用油圧モータが走行モード切替操作部材への人為操作に基づき選択的に小容積状態又は大容積状態とされるコンバインにおいて、低速走行させる必要がある場合における走行安全性を向上させる。
【解決手段】制御装置は、副変速検出センサからの信号に基づき前記多段変速装置が最低速段に係合していると判断する場合には、前記走行モード切替操作部材からの人為操作信号に拘わらず前記走行用油圧モータが大容積状態となるように走行モード切替作動機構を強制的に作動制御する。
(もっと読む)
走行車両
【課題】旋回直後に、次行程の作業位置に合わせるべく操向ハンドルを操作するような時に、旋回後の走行車体の位置合わせを安定して容易に行うことができる乗用型作業機などの走行車両を提供する。
【解決手段】操向ハンドルの操作に連動して操向内側の後輪の駆動を断続的に入り切りする断続的入り切り制御機能B1は、該制御機能B1を作動させた後にハンドルの戻し操作により一度前記制御機能B1が非作動状態となったにもかかわらず、ハンドルの操向操作があるとき、前記制御機能B1における操向内側の後輪の駆動力を入/切する周期の入状態の割合を前回の制御機能B1の作動時の入状態の割合より小さくすることで、走行車体の操向を速やかに行えるため、旋回後の走行車体の位置合わせが安定して容易に行える。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する直進用及び旋回用変速機53,54と、直進用変速機53に対する直進操作具と、旋回用変速機54の旋回操作具とを備えている走行車両において、操作系統の簡素化及び操作性の向上を図る。
【解決手段】互いに直交する旋回軸線及び変速軸線回りに回動可能な制御体を備える。旋回操作具の操作に伴う制御体の旋回軸線回りの正逆回動にて旋回用変速機54を作動させる一方、直進操作具の操作に伴う制御体の変速軸線回りの正逆回動にて直進用変速機53を作動させるように構成する。制御体は、各変速機53,54からの出力を左右の走行部に伝達するミッションケース18に内蔵する。
(もっと読む)
トラクタの旋回制御装置
【課題】枕地における斜め方向への耕耘土の跳ね飛ばしを少なくして、耕耘面の仕上がりを良好に保持することができると共に、旋回時の車速の大小に拘わらず前輪倍速装置が作動するまでに機体が走行する距離を一定とし、最適な旋回タイミングを見つけ出し易くする。
【解決手段】前輪Zが操舵されると、作業機21を上昇させると共に、前輪Zを倍速駆動させて機体の旋回を行うトラクタTの制御装置22において、前輪Zが所定の操舵角以上に操舵されたことを検出するのに伴って作業機21を上昇させる制御を開始すると共に、この上昇制御が開始された後、機体が設定距離以上に走行したことを検出するのに伴って前輪Zの倍速駆動を開始する。
(もっと読む)
コンバイン
【課題】センサにより旋回機構の異常を検出しても、作業者が旋回機構の異常を認識しないで作業することがある。
【解決手段】コンバインは、左右の車軸51の回転に回転差を発生させて旋回する無段階に変速可能な走行装置3と、走行装置3の操向レバー75の操作位置を検出する操向レバー位置検出手段76と、前記左右の車軸51の夫々の回転数を検出する回転検出手段78とを有する。制御コントローラ79の旋回制御異常検出手段80は、検出した左右の車軸51の回転差と、前記操向レバー75の傾倒操作角度とを対比して、旋回制御異常検出手段80で旋回制御の異常を検出し、該旋回制御異常検出手段80が異常と判定すると、異常を報知手段81により報知する。
(もっと読む)
作業車の旋回制御装置
【課題】摩擦式油圧クラッチを兼用することにより走行駆動手段の構成の簡素化を図り、併せて、適切にブレーキ旋回状態を現出させることが可能となる作業車の旋回制御装置を提供する。
【解決手段】走行駆動手段が逆転クラッチの操作圧を変更することにより、ブレーキ旋回状態と逆転旋回状態とに切り換え自在に構成され、前記逆転旋回状態が指令されると、摩擦式油圧クラッチの操作圧を逆転旋回用操作圧にし且つブレーキ旋回状態が指令されるとブレーキ旋回用操作圧に調整するブレーキ旋回用処理を実行し、且つ、ブレーキ旋回状態の指令に切り換えられた直後においては、予め設定された初期操作圧を目標操作圧として設定し、その後は、ブレーキ旋回状態であると判別されるまで、初期操作圧から圧力を変更させた補正操作圧を目標操作圧として設定して、摩擦式油圧クラッチの操作圧を調整する。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバイン等の走行車両において、主変速レバーと操向ハンドルとを直進用及び旋回用HST機構に連動連結するための機構を簡素化する。
【解決手段】互いに直交する2つの軸線回りに回動可能な単一の制御体を収容ボックスに内蔵する。制御体は、操向ハンドルの操作にて縦軸線回りに回動し、且つ、主変速レバーの操作にて横軸線回りに回動するように構成する。収容ボックスには、旋回用変換軸と直進用変換軸とを、互いの軸線が実質的に同一平面上に位置した状態で回動可能に軸支する。更に、各変換軸の回動量を検出する回動角センサ140,180と、各HST機構の制御軸に関連させた電動モータ141,181と、各回動角センサ140,180の検出情報を用いて各電動モータ141,181を駆動させるコントローラ200とを備える。
(もっと読む)
作業車
【課題】直進状態と旋回状態とに切り換え自在な操向手段を備えて、直線状の作業経路に沿って走行する直進走行と前記直線状の作業経路の終端部から次回の直線状の作業経路に向けて予め定めた設定走行パターンにて走行する経路変更用走行とを繰り返す形態で作業を行う作業車に関する。
【解決手段】作業経路変更用走行を自動で行うように前記操向手段101を切り換え制御する作業行程切換制御を実行する自動旋回制御手段102と、前記作業経路変更用走行の開始を指令する手動操作式の自動旋回指令手段SWとが備えられ、前記自動旋回制御手段102が、前記自動旋回指令手段SWの指令に基づいて前記作業行程切換制御を実行するように構成する。
(もっと読む)
コンバインの方向制御装置
【課題】左右方向及び前後方向の株間を共に例えば30cmとした粗植栽培方式の圃場において、コンバインの方向制御を迅速に実行する。
【解決手段】刈取搬送部(6)に刈取対象穀稈への接近状態を検出できる方向センサ(21)を設け、該方向センサ(21)の検出結果に基づいて機体を操向させるように方向制御出力を行なうと共に刈取対象穀稈列の条横判定制御を行なう制御部(26)を設け、方向制御スイッチ(32)が入りで、前記条横判定入切スイッチ(31)が切りのときには、前記制御部(26)は条横判定をせずに方向制御出力をする構成とする。
(もっと読む)
コンバイン
【課題】第1及び第2スイッチの誤操作を防止しながら、第1及び第2スイッチの操作性を向上させることができ、操向レバーの操作性を向上させることができるコンバインを実現する。
【解決手段】コンバインにおいて、運転部Xの前部に機体操向用の操向レバー70を備えて、互いに相反する操作をする第1及び第2スイッチ74,75を、操向レバー70における操作部72の異なる面に配設する。
(もっと読む)
乗用型収穫作業機
【課題】圃場の状態に応じたきめ細かい旋回態様を選択可能な収穫作業機を提供する。
【手段】収穫作業機は走行機体の左右に配置したクローラによって走行する。左右のクローラは、直進機構と旋回機構との組み合わせによって周速度が相対的に変化し、これによって左右いずれかに旋回する。また、旋回時におけるクローラの動きは、旋回内側のクローラが逆転しないノーマルモードと、旋回内側のクローラが逆転するスピンターンモードとがある。更に、直進機構及び旋回機構はオペレータの操作によって出力を増減できる増減装置141,142を備えており、ノーマルモードにおいてもスピンターンにおいても速度を選択できる。このため、圃場の状況に応じた旋回速度を選択できる。
(もっと読む)
コンバイン
【課題】自動方向制御中の自動方向制御の中断および再開のための操作の煩雑化。
【解決手段】操向レバー15により走行方向が操作される左右一対の走行装置2と、該走行装置2の前方に設けられる刈取部5とを有し、走行装置2は刈取部5の各分草体30が互いに隣接する穀稈列の間の株間を通過できるように、植立穀稈を感知する穀稈感知センサ35の信号により自動方向制御され、該自動方向制御は、該自動方向制御実行中に、前記操向レバー15が操向操作されると前記自動方向制御を無効にし、その後、一定時間以上に亘って前記操向レバー15が操向操作されずに刈取作業が行われると、他の手動スイッチ操作をすることなく、自動的に前記自動方向制御が有効となるように構成したコンバイン。
(もっと読む)
作業車両
【課題】操向ハンドル10の回動操作に応じて走行機体を左又は右に旋回させる構成の作業車両において、走行機体の進行方向を修正する際に、操向ハンドル10を細かく切り足したり切り戻したりする手間をなくす。
【解決手段】操向ハンドル10のハンドルホイル部94に、走行機体の進行方向を微調節操作するためのステアリングスイッチ100を備える。ステアリングスイッチ100における左右方向の操作は、操向ハンドル10の回動操作に拘らず、常に許容される構成にする。すなわち、ステアリングスイッチ100と操向ハンドル10とは互いに独立的に操作し得るように構成する。そして、操向ハンドル10の単位操作量に対する走行機体1の旋回動作量は、ステアリングスイッチ100の単位操作量に対する走行機体1の旋回動作量と比べて格段に大きく設定する。
(もっと読む)
1 - 20 / 33
[ Back to top ]