
Fターム[2B062CB04]の内容
移植機(田植機の要素) (4,646) | センサー (158) | 接触式(機械式) (111) | 揺動量検出 (37)
Fターム[2B062CB04]に分類される特許
1 - 20 / 37
苗移植機
【課題】旋回の際の操作を簡易に行うことが可能な苗移植機を提供すること。
【解決手段】走行車体2と、走行車体2の後側に設けられ、苗を圃場に植え付ける条単位毎の植え付け部52を複数有する植え付け装置4と、走行車体を操舵する操舵部材34と、操舵部材34の旋回操作を検知する旋回検知装置102と、1つ又は複数の植え付け部毎に駆動力を入切する部分条クラッチ108と、変形圃場での旋回であることを指示する旋回指示装置107と、走行車体の走行距離を検知する走行検知部材104と、旋回指示装置107が指示した状態で、旋回検知装置102の出力に基づき、走行検知部材104によって検知される走行距離に合わせて、複数の部分条クラッチ108を段階的に入り状態にする制御装置106とを備えた、苗移植機である。
(もっと読む)
苗移植機

【課題】レバー式植付操作機構に旋回連動機構を備える苗移植機において、植付昇降レバーの誤操作によることなく、植付部の安定動作を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、走行車体を旋回操作する操舵部材(4)と、走行車体に昇降可能に支持した植付部(6)と、この植付部(6)の上昇、中立、下降、植付の順に切替え動作させる植付昇降レバー(8)と、上記操舵部材(4)による旋回の開始及び終了と連動して植付昇降レバー(8)を上昇と下降の位置に移動させる自動昇降機構(C)とを備えて構成され、上記植付部(6)の植付作業を検知する作業検知部材を設け、検知した作業が所定の継続範囲に該当しない場合に自動昇降機構(C)の作動を停止するものである。
(もっと読む)
苗移植機
【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
作業車両
【課題】
旋回時に駆動力の切れる走行装置に駆動力を供給する状態とする操作装置を設け、旋回時の走行が停滞することのない作業車両を提供する。
【解決手段】
走行装置11,11と伝動切替装置300を走行斜体2に左右一対設け、走行車体2を左右方向に旋回操作する操作部材34を設け、操作部材34の操作に連動して旋回内側の伝動切替装置300を「切」側に作動させる旋回連動機構307を設け、旋回連動機構307と切替部材305を連結する連動操作機構317を設け、伝動操作部材303を設け、伝動操作部材303と切替部材305を連繋操作部材304で連結して構成する。
(もっと読む)
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
作業車両
【課題】走行停止状態での待機時間を不要としつつ、後進走行中に従来より短時間に作業機を上昇できる作業車両を提供すること。
【解決手段】機体2の後部に苗移植装置7を装着するためのリンク機構8と、リンク機構を昇降させる昇降装置30と、機体2に設けられたエンジン6と、エンジン6の動力を変速して出力する変速装置5と、前進走行域、停止域、及び後進走行域の何れかの位置に切り替えることにより、変速装置の出力を変化させて走行速度を操作する走行操作レバー10と、走行操作レバー10が少なくとも後進走行域にある場合に苗移植装置7の上昇速度をエンジン回転数に基づいて制御する第1の制御を行う制御部200とを備え、第1の制御は、走行操作レバー10が、後進走行域の内、走行速度を最高に設定する最高速位置にあるときのエンジン回転数よりも、最高速位置より手前の位置にあるときのエンジン回転数の方を高くする制御である、作業車両。
(もっと読む)
作業車両
【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
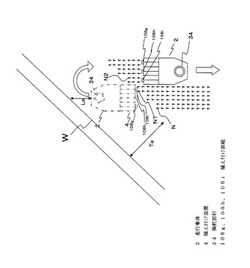
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
乗用田植機
【課題】本発明の課題は、車速の変化に応じて整地ロータ、特に中央のセンタロータを昇降制御することによって、ロータの地中への潜り込みを防止し、整地作業が的確に行えるようにする。
【解決手段】この発明は、苗植付部(4)の前側に植付直前の圃場面を均平化する前位のセンタロータ(27b)と後位のサイドロータ(27a)からなる整地ロータ(27)を設置し、該整地ロータ(27)は、車速の変化に応じて上下動可能に構成すると共に、車速の所定以上の増速に伴い前位のセンタロータが上昇変位すべく関連構成する。
(もっと読む)
乗用型田植機
【課題】フロートの揺動を電気的に検出する検出装置に、泥水などが飛散しないようにした乗用型田植機を提供する。
【解決手段】植付部15の幅方向に延設された植付部フレーム23の両端には、苗載せ台を支持する支持ステー30,30が立設されており、これら支持ステー30,30の中間部には、連動軸が架設されている。連動軸にはモータ・ポテンショベース59が遊嵌されていると共に、モータ・ポテンショベース59の機体後方側にはフロート揺動角検出ポテンショメータ55が取付けられている。フロート揺動角検出ポテンショメータ55のアーム76は、検知フロート16aの先端部と検出リンク56を介して連結されており、フロート揺動角検出ポテンショメータ55は、検出リンク56によって検知フロート16aの揺動を検出している。
(もっと読む)
苗植機
【課題】本発明は、苗植機の昇降制御やローリング制御を簡単な構成として傾斜検出の精度や感度の調節を容易にすることを課題とする。
【解決手段】左右車輪10を共に同方向に上下作動させて機体の上下高さを制御する昇降アクチュエータ15と片側の車輪10の高さを変更して機体の左右傾斜を制御するローリングアクチュエータ17と上下作動して圃場に苗を植付ける左右苗植付ホッパー3を設けた苗植機において、左右の植付圃場面に接地して機体に対する圃場の高さを検出する右昇降センサ5Rと左昇降センサ5Lを設け、この右昇降センサ5Rと左昇降センサ5Lにて昇降アクチュエータ15を作動させ、左右傾斜センサ35によって機体の左右傾きを検出してローリングアクチュエータ17を作動させる車体姿勢制御装置を設け、右昇降センサ5Rと左昇降センサ5Lが共に接地するようにローリングアクチュエータ17を制御した苗植機とした。
(もっと読む)
移動農作業機の変速操作装置
【課題】 農作業走行の土壌条件によって、車体の沈下が著しい場合があり、作業はもとより走行不能状態に至ることがある。又、逆に車体の沈下が少ない土壌面での走行では、走行負荷が小さく加速し易いため、この車速の加速は制限されるのが望ましい。
【解決手段】 走行しながら対地作業する移動農作業機において、車体の沈下量の検出に基づいて、この沈下量が大きいときは、変速スイッチ2の操作による変速アクチュエータ3の変速操作の速さを速くし、又、沈下量が小さいときは、この変速操作の速さを緩くする構成とする。
(もっと読む)
苗植機
【課題】 苗植機では、苗植付行程の終端部や、折返行程、畦越走行、トラック車台等への積み降し作業時等の走行状態では、車体の傾斜が大きく、急激に負荷変化することがある。このため、このような車体の傾斜状態においてアイドリングストップが行われると危険性を伴い易い。
【解決手段】 エンジンの駆動によって走行しながら苗植付作動する苗植機において、車体の傾斜姿勢を検出する傾斜センサ3を有し、この傾斜センサ3の一定以上の傾斜角検出によって、このエンジンのアイドリング停止を牽制することを特徴とするエンジン制御装置の構成とする。
(もっと読む)
移植機
【課題】畔際でマット苗を補給する際、圃場条件や補助作業者の体格等によっては、予備苗のせ台の先端位置が適正な高さとならず、補助作業者に無理な姿勢を強いる場合があった。
【解決手段】移植機1は、走行機体2の後方に、苗のせ台23を有する植付装置20を昇降自在に支持すると共に、前記走行機体2に、該走行機体2の前部から後部に向けて苗を移送し得る苗移送装置30を設けてなり、前記苗移送装置30を前記走行機体2に対して昇降及び/又は前後方向に位置を変更し得る前支柱31及び後支柱32と、予め前支柱31及び後支柱32を所定位置に人為設定すると共に、前記走行機体2の前後方向の対地傾斜角を検出する傾斜センサ11と、前記傾斜センサ11の検出値に基づき、前記走行機体2の前後傾斜に拘らず前記設定された所定値に対応するように前記前支柱31及び後支柱32を調整するコントローラ50とを備えている。
(もっと読む)
移植機
【課題】乗用型田植機の運転操作に不慣れなオペレータであっても、植付作業中における
圃場端部(枕地)での180度旋回(ターン)を容易に行えるようにする。
【解決手段】植付作業中における機体の旋回操作直前に、植付作業機5の昇降と植付クラッチの入切操作とを行う操作具52により、植付作業機5を植付位置から最上昇位置まで上昇させた後、その上昇が停止した時にエンジンEの回転を所定の回転数まで自動的に低下させ、その後、前記操作具52により植付作業機5を植付位置まで降下させ、且つ植付クラッチを入操作した時に、エンジンEの回転を植付作業中の回転数まで自動復帰させるように構成した。
(もっと読む)
苗移植機
【課題】従来から公知の装置は、フロートの前側に軸架された整地ローターが、強制回転駆動されて整地作用を行う構成になっているが、それ以外の作用は期待されていない。本件出願は、前記整地ローターに本来の整地機能に加えて、土壌の硬軟度を検出する検出手段として利用するものである。
【解決手段】走行車体の後部に、制御手段(4)を装備した苗植付装置を連結して、接地センサ(5)の検出値に基づいて植付深さを設定位置に保持するために昇降制御作用を行う構成としている。前記苗植付装置の下側に設けたセンターフロート(6)の前側に、独立して上下動する中央整地作業装置(7)を設け、前記制御手段(4)は、前記中央整地作業装置(7)が上下動により検出した土壌の硬軟度に基づいて昇降制御の感度を補正する構成とした苗移植機としている。
(もっと読む)
水田作業機
【課題】 水田作業機において、アクチュエータにより右及び左のマーカーを作用姿勢及び格納姿勢に操作自在に構成して、オートマーカー機能を備えた場合、アクチュエータに大きな負担が掛からないように構成する。
【解決手段】 対地作業装置5が上昇駆動されると、作用姿勢の右又は左の一方のマーカー19が格納姿勢に操作され、対地作業装置5が下降駆動されると、格納姿勢の右又は左の他方のマーカー19が作用姿勢に操作されるように、アクチュエータを作動させる制御手段(オートマーカー機能)を備える。対地作業装置5が機体に対する所定低位置よりも上方に位置していると、格納姿勢の右又は左の他方のマーカー19が作用姿勢に操作されることを阻止し、対地作業装置5が所定低位置に下降駆動されると又は所定低位置を越えて下降駆動されると、格納姿勢の右又は左の他方のマーカー19が作用姿勢に操作されることを許容する牽制手段を備える。
(もっと読む)
農作業機のローリング制御装置
【課題】 角速度センサを導入したローリング制御において、適切な零点値の設定によって制御精度高めることができるようにする。
【解決手段】 角速度センサ62における零点値設定作動を行う零点値設定手段を備え、この零点値設定手段による零点値設定作動が実行される条件が成立した状態において、角速度センサ62の検出値eの変動が設定範囲以内の場合は、キーオンした時点に取得された角速度センサ62の検出値eを零点値e0とし、角速度センサ62の検出値eの変動が設定範囲外の場合は、最新のキーオフ時点に記憶格納されている角速度センサ62の零点値e0mを今回の零点値e0とするよう零点値設定手段を構成してある。
(もっと読む)
植え付け作業機の昇降制御構造
【課題】 部品レイアウトに苦慮することなく、又、コストの高騰並びに組み付け性やメンテナンス性の低下を招くことなく、植え付け深さ調節にかかわらず、自動昇降制御において、苗植付装置を予め設定した接地高さ位置に精度良く維持できるようにする。
【解決手段】 操作手段51により、植付機構16に対する接地体17の高さ位置を変更することで植え付け深さが調節され、制御手段40が、揺動角度検出手段54で検出される接地体17の検出角度θbが予め設定した制御目標角度θoと一致するように、苗植付装置昇降用のアクチュエータ2の作動を制御することで、苗植付装置4が予め設定した接地高さ位置に維持されるように構成した植え付け作業機の昇降制御構造おいて、植え付け深さ調節に連動して、揺動角度検出手段54の検出角度θbを補正する補正手段64を備えてある。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、電動モータにより所望の少数条クラッチが作動及び停止状態に操作されるように構成する場合、人為操作具の右及び左用操作経路の配置スペースをコンパクトに構成し、人為操作具の操作位置の検出構造を簡素に構成する。
【解決手段】 全条作動位置ON、全条作動位置ONから同じ方向に延出された右及び左用操作経路79,80を備え、全条作動位置ON、右及び左用操作経路79,80での人為操作具50の操作位置を検出する検出装置を備える。全条作動位置ON、右及び左用操作経路79,80での検出装置の検出信号が全て異なるように構成する。検出装置の検出信号に基づいて、人為操作具50を全条作動位置ONから右用操作経路79(左用操作経路80に操作していくと右(左)の少数条クラッチから停止状態に順次操作されるように構成する。
(もっと読む)
1 - 20 / 37
[ Back to top ]