
Fターム[2B076DA16]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構 (1,633) | 流体的駆動機構 (355) | 油圧シリンダ及びその駆動機構 (80)
Fターム[2B076DA16]に分類される特許
1 - 20 / 80
走行車両
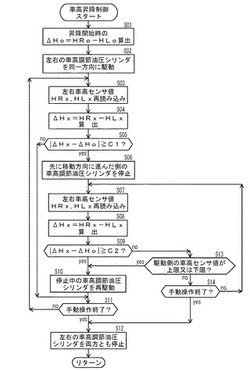
【課題】手動操作によって走行機体の車高を昇降させる場合において、左右のローリングアクチュエータにかかる負荷の大小に拘らず、走行機体の左右傾斜角度をできるだけ一定に維持した状態で、走行機体の車高を昇降できるようにする。
【解決手段】現時点の左右の車高センサ375,376値の差ΔHxと昇降開始時の左右の車高センサ375,376値の差ΔHoとの間の差分の絶対値|ΔHx−ΔHo|が予め設定された第1昇降基準値C1を上回ると、先に移動方向に進んだ側のローリングアクチュエータ38を停止させ、他方のローリングアクチュエータ38の駆動を継続させる。
(もっと読む)
コンバインの姿勢制御装置

【課題】本発明は、機体の水平制御に用いられる油圧シリンダを含む機構を機体に対してコンパクトに配置するコンバインの姿勢制御装置を提供する。
【解決手段】機体フレーム2において機体左右方向に配置される軸部17,22に、当該軸部17,22周りに回動しトラックフレーム10を昇降操作する昇降アーム19,24,26と、軸部17,22を回動させて昇降アーム19,24,26を操作する操作アーム18,23とを機体前後のうちの同方向に取り付け、軸部17,22から同方向への操作アーム18,23の長さF1,R1を軸部17,22から同方向への昇降アーム19,24,26の長さF2,R2以下に設定するとともに、操作アーム18,23と機体フレーム2に亘ってピストンロッド28a,29aを下方に出退させて操作アーム18,23を軸部17,22周りに回動させる油圧シリンダ28,29を鉛直方向に配置した。
(もっと読む)
コンバインの油圧制御回路
【課題】油圧制御回路を改良することで、過負荷の刈り取り作業中であっても刈取装置の昇降制御をスムースに行えるようにする。
【解決手段】刈取装置(10)を昇降する刈取昇降シリンダ(11)に送る圧油を制御する刈取昇降バルブ(12)に、刈取昇降シリンダ(11)からの戻り圧油を止めるパイロット逆止バルブ(65)を設けたコンバインの油圧制御回路において、パイロット逆止バルブ(65)を強制的に開放して逆止状態を解除する手動刈取降下手段(A)を設ける。また、パイロット逆止バルブ(65)への圧油供給を停止した後に、手動刈取降下手段(A)によってパイロット逆止バルブ(65)を開放して逆止状態を解除する構成とする。また、手動刈取降下手段(A)を、手動操作でパイロット逆止バルブ(65)のパイロット逆止バルブ(65)を開放する方向に押すプッシュピン(84)とする。
(もっと読む)
コンバインの刈高さ検出装置及びこの刈高さ検出装置を備えた刈高さ制御装置
【課題】比較的狭いスペースに刈高さ検出装置を設けて、刈取部の前後左右の動きに追従して接地体に前後左右方向から作用する外力で刈高さ検出装置が破損しないようにしたコンバインの刈高さ検出装置及び刈高さ制御装置を提供する。
【解決手段】刈取装置(27)に備えた分草体(42)の下部に上下方向の第一支持軸(1)を設け、この第一支持軸(1)に対して第一支持体(2)を上下スライド自在及び回動自在に取り付け、この第一支持体(2)の後側部に設けた前後方向の第二支持軸(3)に対して第二支持体(4)を回動自在に取り付け、この第二支持体(4)に設けた左右方向の第三支持軸(5)に対して斜め後下方へ延出する接地体(6)の基部を取り付け、この接地体(6)の上下揺動による第三支持軸(5)の回動角度を検出する角度センサ(10)を設けたコンバインの刈高さ検出装置
(もっと読む)
コンバイン
【課題】車高が低下調節がされた場合にも刈取装置の高さ位置を確保できるコンバインを提供する。
【解決手段】コンバインは、車高調節部11を介して機体フレーム1aを高さ調節可能に支持する走行装置3と、機体フレーム1aの前部の刈取昇降部14を介して昇降調節可能に穀稈を刈取る刈取装置4とを備えて構成され、車高調節部11による調節高さを検出する車高検出部11sと、刈取昇降部14による昇降高さを検出する刈取昇降検出部14sと、前記車高調節部11及び刈取昇降部14の動作を制御する制御部Cとを設け、該制御部Cは、前記車高調節部11への下降出力の開始と前記車高検出部11sによる下降側への高さ変化とのうちの何れかが検出され、且つ、刈取昇降検出部14sによる高さが設定値未満となった場合に、前記刈取昇降検出部14sの検出値が設定値以上となるまで前記刈取昇降部14に上昇出力を行なう構成としたものである。
(もっと読む)
コンバイン
【課題】コンバインの刈取装置を弾性的に支持する弾性支持機構を円滑に作動させるものでありながら、機体をコンパクトに構成する。
【解決手段】刈取装置(4)と機体フレーム(1)の間に、刈取装置(17)を昇降させる刈取昇降シリンダ(20)と刈取装置(4)を上昇方向へ付勢する弾性支持機構(21)を設け、刈取装置(4)の下部に設けた橇体(32)が圃場面の凹凸により突き上げ力を受けると、この突き上げ力と弾性支持機構(21)の上方付勢力によって刈取部(4)が上昇退避する構成とし、前記弾性支持機構(21)を穀稈支持板(41)の下方に配置し、該弾性支持機構(21)の基端部を機体フレーム(1)に連結し、該弾性支持機構(21)の先端部を前記縦支持伝動筒体(11)の上部から後方へ延出した連結アーム(27)の後端部に接続する。
(もっと読む)
汎用コンバインの油圧回路
【課題】走行負荷が増大して作動油量が不足しても、収穫作業に必要なリール昇降シリンダ及びセカンドモア昇降シリンダの機能を確保し、収穫作業の能率を高める。
【解決手段】油圧ポンプ(51)から吐出される圧油を、複数の油圧クラッチ(57,58,59,60)を制御する走行油圧回路(54)と刈取部(4)昇降用の刈取シリンダ(61)を制御する刈取油圧回路(55)に供給し、該走行油圧回路(54)と刈取油圧回路(55)のうちのいずれか一方の油圧回路を経て供給される圧油をプライオリティ型分流弁(62)で分流して、リール昇降シリンダ(14)及びセカンドモア昇降シリンダ(66)を備えた機体前部油圧回路(64)に一定流量の圧油を供給し、残りの余剰圧油をローリングシリンダ(68,69)とピッチングシリンダ(70)を備えた機体油圧回路(56)に供給する構成とする。
(もっと読む)
作業車両
【課題】変速レバーに操作力をスプリング荷重を低くせずに安全にアシストすることができる変速レバー操作力のアシスト装置を備えたコンバイン等の作業車両の走行変速装置を提供すること。
【解決手段】変速レバー6が中立位置にあるときに、前記移動体7の支持軸7aと制動装置29の移動体側の作用位置と作業車両1の機体の固定部材25,26側の作用位置とが一直線上に並ぶように変速レバー6の移動体7と制動装置29などを作業車両の機体に取り付けているので、変速レバー6の中立位置と圧縮スプリング29が最も押圧力を発揮する位置がずれなく、また、制動装置29などにより変速レバー6の全ストローク範囲の中間位置までは中立位置に戻ろうとする不具合を押し留めることができ、さらに変速レバー6が中間位置より先に移動すると変速レバー6を中立位置に復帰させる押圧力が発生しないので、変速レバー6はフリーの状態で操作できる。
(もっと読む)
コンバイン
【課題】刈取り部を昇降操作する油圧シリンダの油圧回路をコンパクトに得ることができながら操作弁の塵埃付着を回避しやすくする。
【解決手段】機体フレーム3の前端部に作動油タンク32を、脱穀装置4に刈取穀稈を搬送する搬送経路Rから落下した塵埃を機体フレーム3の前方に向けて落下させる排塵シュート31の下方に配置してある。作動油タンク32の上端側が機体フレーム3から上方に突出している。油圧シリンダ30のための操作弁42を、排塵シュート31の下方に作動油タンク32の上端32bよりも高い配置高さで配置してある。
(もっと読む)
コンバイン
【課題】圃場の凹凸に追随して前処理部を昇降させて、コンバインの刈取性能を向上させる。
【解決手段】刈取部の昇降操作手段を、制御弁が油圧シリンダからオイルタンクへの油路を遮断して刈取部の昇降を停止させる中立位置と、制御弁が油圧シリンダに圧油を供給して刈取部を上昇させる上げ位置と、制御弁が油圧シリンダからオイルタンクへの油路を開放して刈取部を自重で下降させる下げ位置とに切換操作自在に構成すると共に、刈取部が下降した刈取位置で、且つ前記昇降操作手段が中立位置の時、制御弁が油圧シリンダからオイルタンクへの油路を開放して刈取部を自由昇降状態に維持制御する自由昇降制御手段を設ける。
(もっと読む)
コンバイン
【課題】刈取前処理部の刈高調節操作の手間を省き、操作性を向上させると共に、刈取前処理装置が地面へ突っ込んで破損することを防止する。
【解決手段】走行フレーム(2)の前部に上下回動自在に支持した刈取後フレーム(3)の前方延出端部に、左右一側へクランク状に偏倚して前方に伸びる刈取前フレーム(4)を、左右方向の横軸(5)を中心に上下回動自由に連結し、刈取前フレーム(4)には刈取前処理装置(9)を装備し、刈取後フレーム(3)には刈取前処理装置(9)から受継いだ穀稈を脱穀装置(1)に搬送する穀稈搬送装置(10)を装備し、刈取後フレーム(3)に対して刈取前フレーム(4)を吊持ち状態に支持する弾性を有した付勢装置(11)を設けると共に、刈取前フレーム(4)を接地支持する第1橇(13)を設ける。
(もっと読む)
コンバイン
【課題】走行機体1の左右又は前後の傾斜角度の初期設定基準値(機体水平値)を簡単に認識でき、走行機体1の左右方向又は前後方向の傾斜姿勢を、走行状況等に対処して俊敏に変更できるように従来技術を改良した走行車両を提供するものである。
【解決手段】エンジン14が搭載された走行機体1に、左右又は前後の複数本の油圧シリンダ38又は177を介して、左右の走行部2を設け、走行機体1の左右及び前後の傾斜角度を変更させるコンバインにおいて、走行機体1の左右又は前後の傾斜角度の少なくともいずれか一方が初期設定基準値(機体水平値)に戻ったときに、油圧シリンダ38又は177を一旦停止させるように構成したものである。
(もっと読む)
コンバインの姿勢安定装置
【課題】コンバインの走行フレーム上の重量変化を検出して実際に走行フレームが傾く前にバランス装置を作動させて機体の重心位置が変化しないようにすることで、機体の前後左右の水平を維持して、脱穀装置の選別性能を良好に維持する。
【解決手段】コンバインの走行フレーム(1)上に備えたグレンタンク(2)との機体中心対称位置に、二次元的に移動可能なバランスウエイト(3)を備えたバランス装置(4)を設け、グレンタンク(2)内に設ける穀粒センサ(S1,S2,S3,S4)の穀粒溜まり具合の検出結果に基づいて、グレンタンク(2)内の穀粒が増加しても機体全体の重心位置が変化しないように前記バランス装置(4)を作動させる構成とする。
(もっと読む)
コンバイン
【課題】走行機体1の傾斜姿勢が自動的に修正されることを利用して、穀物タン7ク内の穀粒の質量を高精度で計測でき、穀粒の質量の計測誤差を簡単に低減できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3及び脱穀装置5及び穀物タンク7を装設した走行機体1と、走行機体1の左右方向又は前後方向の傾斜姿勢を修正する傾斜姿勢アクチュエータとしての車高調節油圧シリンダ38又は前後傾斜用油圧シリンダ177と、穀物タンク7の質量を計測する計量手段としての計量器399を備えるコンバインにおいて、走行機体1の左右方向又は前後方向の傾斜姿勢が自動的に修正されることによって、走行機体1が水平姿勢に維持されているときに、計量器399によって穀物タンク7の質量が計測されるように構成したことを特徴とする。
(もっと読む)
コンバイン
【課題】土の取り込みを防止しつつ水平制御を行うことができる3つ以上の対地高さ検出用ソリ体を備えたコンバインを提供する。
【解決手段】コンバイン150は、対地高さ検出用ソリ体を少なくとも3個以上有し、それぞれが独立して対地高さを検出する。そして、左右端に位置する対地高さ検出用ソリ体36L、36Rは、畝に対する水平制御用の検出機能を保持し、また、中間に位置する対地高さ検出用ソリ体36Cは、刈り高さ制御用の検出機能を保持する。
(もっと読む)
コンバイン
【課題】簡便な構造で実現することができる3つ以上の対地高さ検出用ソリ体を備えたコンバインを提供する。
【解決手段】コンバイン150は、複数の対地高さ検出用ソリ体36L、36C、36Rに刈取部4を横断する状態で各支軸40L、40C、40Rをそれぞれ連設し、少なくとも支軸40L、40Cを内外層の同軸構成とし、かつ該支軸の各左軸端に前記対地高さ検出用ソリ体36L、36Rとポテンショメータ52L、52Cとを連動連結する複数の連動リンク機構75L、75Cを設けた。また、右支軸40Rの右軸端に対地高さ検出用ソリ体36Rとポテンショメータ52Rと連動連結する連動リンク機構75Rを設けた。
(もっと読む)
コンバイン及び対地高さ制御プログラム
【課題】土の取り込みを防止しつつ水平制御を行うことができる3つ以上の対地高さ検出用ソリ体を備えたコンバイン及び対地高さ制御プログラムを提供する。
【解決手段】対地高さ検出用ソリ体を少なくとも3個以上別々に配設し、それぞれが独立して対地高さを検出する。そして、左右端に位置する対地高さ検出用ソリ体36L、36Rは、畝に対する水平制御手段を有し、また、中央に位置する対地高さ検出用ソリ体36Cは、刈り高さ制御手段を有する。さらに、前記水平制御手段は、左右の畝における最大高さと最小高さの各検出値をもとにして対地平行制御を行い、また、前記刈り高さ制御手段は、3条の畝における最大高さの検出値をもとにして前記刈取部の昇降制御を行う。
(もっと読む)
走行車両
【課題】ピッチングアクチュエータの耐久性を向上でき、ピッチングアクチュエータをコンパクトに配置でき、走行機体等を簡単に構成できるようにしたコンバインを提供する。
【解決手段】左右の走行部としての走行クローラ2を有する走行機体1と、走行機体1の左右方向の傾斜姿勢を修正するローリングアクチュエータ38と、走行機体1の前後方向の傾斜姿勢を修正するピッチングアクチュエータ177を備えた走行車両において、ローリングアクチュエータ38と、ピッチングアクチュエータ177を、平面視で一列状に配置したものである。
(もっと読む)
走行車両
【課題】走行機体1とトラックフレーム21の支持構造の耐久性を向上できるものでありながら、ピッチングアクチュエータ177の制御によって走行機体1の前後方向の傾斜姿勢を簡単に変更できるようにした走行車両を提供するものである。
【解決手段】左右の走行部2を有する走行機体1と、走行機体1の左右方向の傾斜姿勢を修正するローリングアクチュエータ38と、走行機体1の前後方向の傾斜姿勢を修正するピッチングアクチュエータ177を備え、左右のトラックフレーム21に左右のリンク機構R1,P1を介して走行機体1を昇降可能に搭載し、走行機体1の左右方向の傾斜姿勢と、走行機体1の前後方向の傾斜姿勢を修正可能に構成した走行車両において、リンク機構R1,P1は、平行リンク状の前側アーム33及び後側アーム34を有する構造であって、トラックフレーム21にピッチングリンク175を介して前側アーム33又は後側アーム34のいずれか一方を連結したものである。
(もっと読む)
コンバインの刈高さ制御装置
【課題】コンバインの刈高さ制御装置において、穀稈の刈高さの変動を少なくし、刈取搬送部の地面への突込みを防止する。
【解決手段】接地センサSE1と刈高さポジションセンサSE2とで刈取搬送部の刈高さを設定機体高さに昇降制御する刈取搬送部昇降制御手段を備え、接地センサSE1が刈取搬送部の地面への接地を検出すると、接地センサSE1が接地検出をしなくなるまで刈取搬送部を所定高さに上昇させる。次いで、上昇後所定時間あるいは所定距離走行した後に、刈取搬送部を設定対機体高さまで低速で下降させるコントローラ20を備える。
(もっと読む)
1 - 20 / 80
[ Back to top ]