
Fターム[2B083HA07]の内容
収穫機の構成要素−刈取部 (10,121) | 刈取り装置のその他の細部 (2,000) | 車両と刈取装置間の連結構造に係る細部 (215) | 制御機構を有するもの (64)
Fターム[2B083HA07]に分類される特許
1 - 20 / 64
歩行型草刈り機
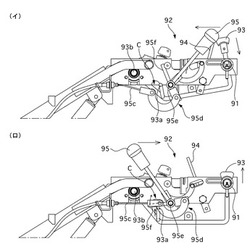
【課題】 刈り取り操作停止時におけるレバー操作が容易な歩行型草刈機の提供。
【解決手段】 ハンドル9部付近に刈刃クラッチレバー95とデッドマンクラッチレバー93を備えた歩行型草刈り機において、デッドマンクラッチレバー93のON状態からOFF状態への切り換えに連動して刈刃クラッチレバー95のON状態からOFF状態に切り換える連動機構を備える。
(もっと読む)
自動芝刈り機及びその制御方法

【課題】市販の芝刈り機を改造して自律走行のための学習と自動運転をさせるための制御装置及び制御プログラムを付与した自動芝刈り機及びその制御方法を提供する。
【解決手段】本発明の自動芝刈り機は、手動運転型の芝刈り機に自律走行のための各種装置が取り付けられて自動運転を行う自動芝刈り機であって、少なくとも位置検出手段を含む各種センサと、少なくとも走行車両の駆動系(アクセル)及び操舵系(ステアリング)を含む自動操縦のためのアクチュエータと、アクチュエータにより走行車両を目的位置に移動させるための走行制御ユニットと、走行路面に沿って芝刈りを行うカッティング部と、センサの情報を基に走行制御ユニットを制御するための各種演算処理を行う演算ユニットと、無線通信により演算ユニット及び走行制御ユニットを介して走行車両を遠隔操作するための無線通信手段と、を備える。
(もっと読む)
電動作業機
【課題】駆動等の準備が整う前にキースイッチがON状態にされた場合でも誤作動を防止できる電動作業機を提供する。
【解決手段】バッテリ31を駆動源とする芝刈作業機1において、旋回レバー21・22の操作位置を検知するレバーセンサ23・24を設け、旋回レバー21・22の中立位置を検出した後にバッテリ31と走行部用モータ15・16との電気経路32bを通電する制御装置50を設けた。また、芝刈作業機1は、電動乗用機であり、座席シート5の着座を検知する着座センサ33を設け、バッテリ31と走行部用モータ15・16及び作業部用モータ28・29との電気経路32bを通電する条件に座席シート5の着座の検出を付加した。
(もっと読む)
移動式電動作業機
【課題】作業部の過負荷運転を回避することができる移動式電動作業機を提供する。
【解決手段】走行部20によって移動しながら、ブレードインバータ14A・14Bから供給される電力により駆動される作業部10A・10Bによって作業を行い、デッキ高さ調整部30によってデッキ3のデッキ高さ位置Hを調整する電動式芝刈作業機100であって、ブレードインバータ14A・14Bからのブレードインバータ電流値Iba・Ibbに基づいて、作業部10A・10Bの作業負荷が一定となるように、デッキ3のデッキ高さ位置Hの調整を制御する。
(もっと読む)
移動式電動作業機
【課題】作業部の過負荷運転を回避することができる移動式電動作業機を提供する。
【解決手段】走行部20A・20Bによって走行しながら、ブレードインバータより供給される電力で駆動されるブレードモータ12A・12Bによって芝刈り作業を行う電動芝刈作業機100であって、電力変換器からの負荷トルク値としてブレードインバータからのブレードインバータ電流値に基づいて、作業負荷が一定となるように、走行部20A・20Bの走行速度を制御する。
(もっと読む)
移動式電動作業機
【課題】作業部の過負荷運転を回避することができる移動式電動作業機を提供する。
【解決手段】走行部20によって走行しながら、ブレードインバータ14A・14Bから供給される電力により駆動される作業部10A・10Bによって作業を行う電動芝刈作業機100であって、ブレードインバータ14A・14Bからのブレードインバータ電流値Iba・Ibbに基づいて、作業部10A・10Bの作業負荷が一定となるように、ブレード11Aのブレード回転速度Vba、あるいは、ブレード11Bのブレード回転速度Vbbを制御する。
(もっと読む)
作業車
【課題】走行状態指令手段の指令情報に基づいて、定格領域を越えるような出力制限領域にて制御指令用速度及び制御指令用駆動トルクが指令された場合であっても、操作者が意図した旋回走行が行うことが可能となる作業車を提供する。
【解決手段】左右の走行装置を夫々独立に走行駆動する一対の電動モータ11R,11Lの作動を制御する制御手段23が、各電動モータ11R,11Lについて求めた目標速度と各電動モータ11R,11Lの回転速度とに基づいて求めた制御指令用速度及び制御指令用駆動トルクが出力制限領域にあるときは、走行状態指令手段にて指令されている車体の旋回状態に対応する速度差を維持し、且つ、定格領域に戻るように、制御指令用速度及び制御指令用駆動トルクを補正する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
草刈作業機
【課題】効率よい作業が可能で、容易に草刈作業部を操作可能とした草刈作業機を提供する。
【解決手段】草刈作業機において、草刈作業部5が装着部2に対し水平状態を含む一定の角度範囲のときのみトラクタ後方の収納位置へ移動可能に牽制手段が設けられている。さらに、自動収納スイッチ862を備え、自動収納スイッチ862を操作すると自動的に草刈作業部5が水平位置に回動するとともに、トラクタ後方の収納位置へ水平移動する制御部を備えた草刈作業機による。
(もっと読む)
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
芝刈機
【課題】境界検出手段を支持するための支持構造を簡単なものにすることが可能でありながら、境界検出手段により既刈り領域と未刈り領域との刈跡境界を精度よく検出することが可能となる芝刈機を提供する。
【解決手段】走行駆動装置11R,11Lにより直進並びに旋回走行自在に走行駆動される走行機体の走行に伴って芝を刈り取るモーア4と、既刈り領域と未刈り領域との刈跡境界を検出する境界検出手段Qと、境界検出手段Qの検出情報に基づいて走行用の所定の制御を実行する制御手段とを備え、境界検出手段Qが、モーア4の刈刃ハウジング7における前側縦壁部7B1の前面にて芝の存否を検出するように構成されている。
(もっと読む)
作業車両
【課題】
本発明は、電動モータで走行し、エンジンで作業機を駆動する作業車両において、エンジンの始動・停止を適正に行うことを課題とする。
【解決手段】
走行輪(1,2)を走行用駆動モータ(14)で駆動すると共に、作業機(8)をエンジン(3)で駆動する構成とし、PTO操作手段(19)でPTOクラッチ(27)を入りにしたときにエンジン(3)を始動する制御を行なうと共に、PTO操作手段(19)でPTOクラッチ(27)を切りにするとエンジン(3)を停止する制御を行なう制御手段(29)を設け、制御手段は走行用バッテリ(13)の状態から充電の要・不要を判定し、走行用バッテリ(13)の充電の不要を判定するとエンジン(3)の駆動中も充電を行なわないように制御する
(もっと読む)
遠心クラッチを備えた携帯作業機のブレーキ装置
【課題】慣性運動している刃物を的確に動作停止することのできる携帯作業機のブレーキ装置を提供する。
【解決手段】クラッチドラム44aに臨んで電磁石48のコア本体54が配設されている。加速度センサ24が衝撃を検知するとエンジン14が緊急停止される。そして、発電器70の発電電圧が所定の電圧まで低下すると回転数検知回路80の第1のリセットICが動作し、これによりコントローラ(マイコン)26から電磁石ブレーキ機構42にブレーキON信号が出力される。電磁ブレーキ機構42は電磁石48とコンデンサ74を含み、コンデンサ74を電源として電磁石48が駆動される。電磁石48のコア本体54はクラッチドラム44aに電磁吸着する。
(もっと読む)
歩行型草刈機
【課題】走行機体を前進させての刈取作業及び走行機体を後進させての刈取作業を可能に構成しながら、刈刃を回転させる動力を節約することができる歩行型草刈機を簡素な構造で実現する。
【解決手段】原動部Eの下部に刈刃10を上下軸心P2周りに回動自在に支持し、走行機体1に原動部E及び刈刃10を左右軸心P1周りに揺動可能に支持する。刈刃10の前側が下方に揺動した前下がり傾斜姿勢、及び、刈刃10の後側が下方に揺動した後下がり傾斜姿勢に、原動部E及び刈刃10を姿勢変更する傾斜姿勢変更機構を備える。
(もっと読む)
電動乗用草刈機
【課題】草刈作業と運搬作業とを選択的に行うことが可能な電動乗用草刈機を提供する。
【解決手段】モアブレードと、モアデッキ15と、左右一対の後輪12と、一対の後輪12をそれぞれ独立に駆動する2つの走行モータと、2つの走行モータの駆動をそれぞれ独立に操作する左右の走行操作レバー14L,14Rとを備え、走行操作レバー14L,14Rを操作することで、前後進、左右旋回を行う電動ローンモア10であって、運転席13と、運転者が乗降時に足を載せるためのステップSTとを備え、運転席13が前向きと後向きとに変更可能であるとともに、走行モータが前後いずれにも回転可能であり、さらに、走行操作レバー14L,14Rは、運転席13が前向き、後向きのいずれであっても操作可能であって、運転席13が後向きのとき、ステップSTに物体を載置する。
(もっと読む)
無線操縦式草刈払機製造方法
【課題】無線操縦式草刈払機装置は、制御装置・連結システム構造の伝導駆動機を決定とした一連機能が維持でき、多様な作業形態を迅速に行うことが可能なことから作業性・能率性・効率性・生産性の向上を提供する。
【解決手段】トラブルによる作動停止や危険極まりない作業条件を安心・安全しかも、一人の集中操作で省力化を図り、無線操縦作業による、作業性・能率性・効率性・生産性の向上が得られる。
(もっと読む)
電動乗用作業車両
【課題】電装品の交換やメンテナンスを容易に行える電動乗用作業車両を提供する。
【解決手段】左右一対の後輪12,12と、後輪12,12の間で、かつ、後輪12,12に隣接して設けられるメインフレーム18と、後輪12を上方より覆うフェンダー24L,24Rと、それぞれの後輪12,12を駆動する左右一対の走行モータ31,31と、走行モータ31の回転を制御する走行モータ用ドライバE1とを備える電動ローンモア10であって、フェンダー24L,24Rを開閉自在とするとともに、フェンダー24L,24R内に収納部を形成し、収納部に走行モータ用ドライバE1を収納する。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
歩行型草刈機
【課題】走行機体を前進させての刈取作業及び走行機体を後進させての刈取作業を可能に構成しながら、刈刃を回転させる動力を節約することができる歩行型草刈機を簡素な構造で実現する。
【解決手段】前後向きの右及び左のメインフレーム31,32と、左右向きの前部フレームと、左右向きの後部フレームとを備えて、機体フレームを構成する。原動部Eの下部に刈刃10を上下軸心P2周りに回動自在に支持して、原動部Eを、平面視で右及び左のメインフレーム31,32の間で前部及び後部フレームの間に配置し、且つ、左右軸心P1周りに揺動可能に右及び左のメインフレーム31,32に支持する。刈刃10の前側が下方に揺動した前下がり傾斜姿勢、及び、刈刃10の後側が下方に揺動した後下がり傾斜姿勢に、原動部E及び刈刃10を姿勢変更する傾斜姿勢変更機構を備える。
(もっと読む)
1 - 20 / 64
[ Back to top ]