
Fターム[2B304LA05]の内容
Fターム[2B304LA05]の下位に属するFターム
ロータリ耕耘機 (182)
プラウ、ハロー、サブソイラ (17)
Fターム[2B304LA05]に分類される特許
1 - 20 / 58
代かき作業機の耕深表示装置
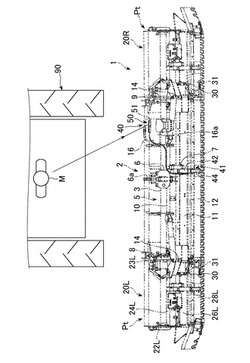
【課題】代かき作業時に耕深を一定にすることができ、耕深の確認時に走行機体の直進性が維持できる代かき作業機の耕深表示装置を提供する。
【解決手段】耕深表示装置40は、回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設された第1整地板11とこの後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備えて走行機体90に装着される代かき作業機1に搭載される。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され耕耘ロータの耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動するリンク機構部41と、この回動に応じて耕深を表示する耕深表示部50とを有する。耕深表示部50は、走行機体90に搭乗した作業者Mが代かき作業1に向かって斜め後方へ振り返ったときの作業者Mの視線の延長先に設けられる。
(もっと読む)
トラクタ

【課題】作業の経過時間でDPF内のPMの堆積量を推定することで、PMの堆積量が閾値を超えるまでの作業可能時間を推定し、作業効率を向上させることを課題とする。
【解決手段】排気ガス中の粒状化物質PMを捕集するディーゼルパティキュレートフィルタ46bを備えたディーゼルエンジンを搭載したトラクタにおいて、作業時に作業の種類を選択する作業切換手段71を設け、該作業切換手段71の選択に応じて時間の経過とともに前記ディーゼルパティキュレートフィルタ46b内の粒状化物質PMの堆積量を推定する堆積量推定手段110を設けたことを特徴とするトラクタの構成とする。
(もっと読む)
作業車両
【課題】本発明は、路上走行と耕耘作業のモード切替手段を設けることによって路上走行速のままで耕耘作業に入るような事態を回避し、問題解決を図らんとするものである。
【解決手段】メータパネル(8)の適所にスイッチON・OFFにより耕耘作業モードと路上走行モードとに切り替えできるモード切替スイッチ(22)を設け、前記耕耘作業モードの詳細設定をする各種設定器(29)は、前記メータパネル(8)部周辺若しくは運転操作部(9)近くに設置してあることを特徴とする作業車両とする。また、前記各種設定器(29)は、耕深設定器(24)、傾斜設定器(26)、ブレーキ調整設定器(28)等からなり、タッチパネル画面で調整が行えるように構成してあることを特徴とする作業車両とする。
(もっと読む)
代かき作業機の耕深表示装置
【課題】代かき作業時に耕深を一定にすることができる耕深表示装置を提供する。
【解決手段】耕深表示装置40は、機体5に回転自在に支持された耕耘ロータ13の上部を覆うシールドカバー13と、この後部に上下方向に回動自在に配設されて耕耘ロータ13により耕耘された耕土を整地する第1整地板11と、この後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備える代かき作業機1に設けられる。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され、耕耘ロータ13により耕耘された耕土の耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動自在な揺動アーム42と、揺動アーム42の回動に応じて耕深を表示する耕深表示部50とを有してなる。
(もっと読む)
均平作業機
【課題】均平作業機が、均平作業に伴い、圃場表面の余剰の土を均平作業機の左右側方に掻き分けるようにして押し逃がして左右側縁に沿って不必要な畝が生じるような従来の問題を解決する。
【解決手段】均平部3は、作業進行方向に対して横方向に水平に伸びる均平支持軸20に、その長手方向に一定間隔を置いて取り付けられた複数の均平部材21とを有し、全体的に櫛歯状に構成されており、圃場外部に設けられたレーザ発光装置48から放射される水平レーザ信号49を受光装置41で受光して、受光装置41で検出した均平部3の高さに応じて、油圧シリンダ30を動作して上下可動用リンク機構4により、均平部3を圃場表面に対して一定の角度の姿勢を維持して上下に移動させて高さを制御する。
(もっと読む)
農作業機のリモコン装置
【課題】無線化されたリモコン装置の電源の消費電力を抑える。
【解決手段】リモコン装置100は、電源113と、これをオンオフする電源スイッチ101bと、このオンオフ状態を表示する電源ランプ101cと、農作業機の各種作動を制御する指令信号を送るための指令スイッチ101e等と、農作業機が所定作業可能状態にあるときに点灯する自動可ランプ101fと、各種作動を制御する指令信号データを記憶する記憶部111と、指令スイッチ101e等・電源スイッチ101bのいずれかがオンされると、指令信号データを記憶部から読み込んで通信部に送る制御部110を備え、制御部110は電源ランプ101cと自動可ランプ101fが点灯している時に、電源ランプ101cと自動可ランプ101fの電力消費を抑える省エネモード及び電源ランプ101cを消灯するオートパワーオフモードのいずれかに切り替えるランプモード切替部110bを備える。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
トラクタ
【課題】エンジンのストールを防止するとともに、燃費の良い状態で作業を継続して行うことができるトラクタを提供する。
【解決手段】エンジンと、ロータリ耕耘装置と、昇降アクチュエータと、制御装置と、を備えるトラクタであって、制御装置は、エンジンのエンジン回転数Nrとエンジンの正味平均有効圧力Pmとの関係を示すマップにおいて予め設定される低燃費領域Zを記憶し、出力検出手段により検出されるエンジンの出力に基づいてエンジンの負荷率を算出し、エンジン回転数Nr及び正味平均有効圧力Pmが低燃費領域Zに含まれ、かつ負荷率が上昇用設定負荷率(設定負荷率)以上である状態が上昇用設定時間(設定時間)以上継続した場合、ロータリ耕耘装置を設定角度(設定上昇量)だけ上昇させる。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
作業車両
【課題】作業車両において、作業機を昇降させることのできるフィンガーレバーを利用した左右操舵装置、及びウインカ点滅を可能にする。
【解決手段】ステアリングハンドルの近傍に一回の操作で作業機を昇降させることのできるフィンガーレバー、該フィンガーレバーの昇降操作検出用のフィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチ、及び、チエックヒューズを設け、旋回切れ角センサの故障時には前記チエックヒューズを取り外すと緊急操舵モードに移行し、前記フィンガーレバーの昇降操作に基づく前記フィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチの検出信号により、前記旋回切れ角センサの検出値を無視して前記旋回駆動手段、前記操舵装置を作動させて左右操舵するコントローラを設けたことを特徴とする作業車両とする。
(もっと読む)
作業車
【課題】操作性を維持しながら作業車の製作コストを下げ易くする。
【解決手段】手動モード入力スイッチ26が、機体フレームの左右のいずれかが上昇又は下降するように、左右のトラックフレームのうちのいずれかを上昇又は下降させるローリング用手動モードで作動させる制御指令を入力可能なローリング用手動モード入力スイッチ26aと、左右のトラックフレームを同時昇降させる昇降用手動モードで作動させる制御指令を入力可能な昇降用手動モード入力スイッチ26bとを各別に備え、ローリング用手動モード入力スイッチ26aが、横長でかつ機体前後方向の軸芯Ya周りに揺動操作自在なシーソースイッチで構成され、昇降用手動モード入力スイッチ26bが、縦長でかつ機体左右方向の軸芯Yb周りに揺動操作自在なシーソースイッチで構成されている。
(もっと読む)
農作業機用リモコン操作システム
【課題】部品の共通化が可能でかつシステムの変更を容易に行うことができるトラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムを提供することを目的とする。
【解決手段】トラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムであって、操作信号を無線送信可能な送信部10と、農作業機側に設置され送信部10からの無線信号を受信する受信部20と、農作業機側に設置され受信部20からの操作信号により出力機器を制御する制御部40と、受信部20と出力機器と制御部40とに接続される制御ハーネス30とを有し、受信部20と制御ハーネス30の間には、受信部20を脱着可能な接続部20aを具備する。
(もっと読む)
農作業機用リモコン送信装置
【課題】トラクタに装着する農作業機に備える出力機器を操作するための農作業機用リモコン送信装置で、電源確保の確実性を向上させた農作業機用リモコン送信装置を提供することを目的とする。
【解決手段】トラクタ1に装着される農作業機2に備える出力機器110を操作するために操作信号を無線により送信する農作業機用リモコン送信装置10において、操作信号を無線により送信する無線送信部11と、外部電源が接続可能な外部電源接続部10aと、外部電源接続部10aから入力される電圧を無線送信部11で使用する一定の電圧に変換する電源回路12とを有する。
(もっと読む)
乗用型水田作業機
【課題】回転駆動自在な整地ロータによる整地を行わせるものでありながら、水田作業装置の不適切な対地高さ制御の発生を回避しやすく、かつ整地ロータの昇降操作を構造簡単に行うことができる乗用型水田作業機を提供する。
【解決手段】接地センサフロート12の左側及び右側に、回転駆動自在な整地ロータ50を設けてある。左側の整地ロータ50と右側の整地ロータ50とに各別に動力伝達する一対の伝動手段60,60を設けてある。左側の整地ロータ50を水田作業装置のフレーム14に対して昇降自在に支持する左支持手段70L、右側の整地ロータ50を水田作業装置のフレーム14に対して昇降自在に支持する右支持手段70Rを設けてある。左支持手段70Lと右支持手段70Rを連動させる連動手段を設け、左側の整地ロータ50を上昇側及び下降側に操作する駆動機構を設けてある。
(もっと読む)
作業車
【課題】複数の制御モードの選択切り換えと、その切り換えた制御モードでの設定変更の可否と、設定変更した値を記憶するか否かの選択とを単一の選択操作具で行わせるようにして、構造の簡素化と操作性の向上とを図る。
【解決手段】制御装置100は、一つの制御モードが選択された状態において、選択操作具67が選択操作のために設定された時間よりも長い時間にわたって操作されると、制御手段101〜105の制御状態を設定操作具45により変更設定可能な変更設定モードを設定し、変更設定モードの設定後に選択操作具67が再度長い時間にわたって操作されると、制御手段101〜105の変更された状態を記憶手段106に記憶させるように構成した。
(もっと読む)
多目的小型電動式トラクター
【課題】畑作農作業のほとんどを機械化でき、密閉された空間でも作業が可能な多目的小型電動式トラクターと、ユニット化した小型農機具を提供する。
【解決手段】多目的小型電動式トラクター1は、荷物及び各農機具ユニットを載せる荷台8を有し、荷台8を載せる車体フレーム2にはロボットアーム10が設けられている。一対の駆動前輪3a、3bと一対の前輪駆動モータ4a、4bと一対のフリー回転の後輪9a、9bを有し、車体フレーム2に搭載されているウィンチワイヤー巻き取りドラム11と、ドラム駆動するモータ12を有している。荷台8は小型農機具ユニットを搭載して、荷台高さ調整モータ5で上下に移動可能になっている。ロボットアーム10は360度回転可能で3箇所に関節が設けられ、手首は360度回転可能で物体を挟むことが出来る。また手首部分は取り外し可能で、別種の農具を付け替えることが出来る。
(もっと読む)
トラクタ
【課題】トラクタに作業機を連結する作業、或いは作業機を清掃する作業等において、作業者が地上に降りた状態であっても迅速にエンジンを停止させたり、或いはPTOクラッチを切り操作することができるようにする。
【解決手段】制御装置は、指令スイッチの何れか一つのスイッチが単独で入りとなった際には、ヒッチ機構を昇降又は傾斜させ、また、二つの指令スイッチが共に入りとなった際には、エンジンを停止させ、或いはPTOクラッチを切る。
(もっと読む)
作業車
【課題】作業装置の作動形態を設定しての制御を終了した後、再び元の作動形態での制御を行う際や、作業装置の作動形態の設定を行ってから、再度の作動形態の設定を行う際の操作を簡便に行えるようにする。
【解決手段】制御手段101,102,103,104,105による制御作動の入り状態と切り状態とを択一選択可能な切換スイッチ67による制御作動の切り操作に基づいて、制御手段101,102,103,104,105による制御の終了時点における作動形態を不揮発性メモリに記憶する記憶手段106を備え、かつ、切換スイッチ67による制御作動の入り操作に基づいて、各作業装置5,11,30,31を記憶手段106に記憶された作動形態に復元させる。
(もっと読む)
トラクタの旋回制御装置
【課題】枕地における斜め方向への耕耘土の跳ね飛ばしを少なくして、耕耘面の仕上がりを良好に保持することができると共に、旋回時の車速の大小に拘わらず前輪倍速装置が作動するまでに機体が走行する距離を一定とし、最適な旋回タイミングを見つけ出し易くする。
【解決手段】前輪Zが操舵されると、作業機21を上昇させると共に、前輪Zを倍速駆動させて機体の旋回を行うトラクタTの制御装置22において、前輪Zが所定の操舵角以上に操舵されたことを検出するのに伴って作業機21を上昇させる制御を開始すると共に、この上昇制御が開始された後、機体が設定距離以上に走行したことを検出するのに伴って前輪Zの倍速駆動を開始する。
(もっと読む)
田植機
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
1 - 20 / 58
[ Back to top ]