
Fターム[2B304LA06]の内容
農作業機用昇降装置 (9,026) | 機種 (1,220) | 土作業機 (334) | 耕耘作業機、整地作業機 (257) | ロータリ耕耘機 (182)
Fターム[2B304LA06]に分類される特許
1 - 20 / 182
作業機の油圧駆動装置
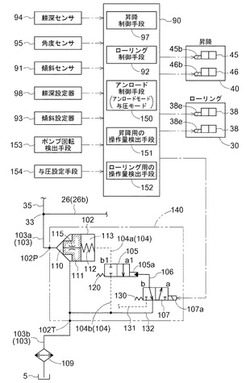
【課題】アンロード回路の調節による複数の油圧アクチュエータの駆動調節を適切に行わせることができる作業機の油圧駆動装置を提供する。
【解決手段】複数の油圧アクチュエータの操作弁機構30,40に圧油供給する圧油供給路26から圧油を排出するアンロード回路103、アンロード回路103を開度調節する操作弁107を設けてある。操作量検出手段151,152による検出情報、ポンプ回転検出手段153による検出情報に基いて操作弁107を制御するアンロード制御手段150を設け、操作弁機構30,40の操作量に応じてアンロード回路103を開度調節するように、油圧ポンプが低速回転であるとアンロード回路103を小開度に調節するように、油圧ポンプが高速回転であるとアンロード回路103を大開度に調節するように構成してある。
(もっと読む)
水平制御装置

【課題】オペレータが移動させたい方向とは反対方向に制御対象部材の傾きが変更されるという不都合を確実に防止する。
【解決手段】水平制御装置において、制御装置は、傾き設定部材が操作されると、当該傾き設定部材の操作方向を把握すると共に、傾きセンサによって検出された前記傾き設定部材の操作前の状態における制御対象部材の実際の傾きと前記傾き設定部材の操作後の状態に応じて設定される目標傾きを基準とした縮小幅の不感帯との相対位置関係に基づいてアクチュエータによって前記制御対象部材が傾けられるべき傾斜方向を把握して、前記操作方向及び前記傾斜方向が同じか否かを判定し、前記操作方向及び前記傾斜方向が同じ場合には前記傾き設定部材の操作時に行う不感帯幅の縮小幅への変更を許容し、前記操作方向及び前記傾斜方向が異なる場合には前記傾き設定部材の操作時に行うべき不感帯幅の縮小幅への変更を禁止して不感帯幅を標準幅に維持する。
(もっと読む)
作業機の作動システム
【課題】第三者による作業機の作動を確実に防止することができる作業機の作動システムを提供する。
【解決手段】管理サーバ3は、ユーザ登録の完了後に携帯用IDコードを携帯端末4に送信するIDコード送信手段51を備え、携帯端末4は、IDコード送信手段51から送信された携帯用IDコードを保存するデータ記憶手段7と、データ記憶手段7に記憶された携帯用IDコードを作業機2に送信するデータ送信手段8とを備え、制御装置5は、携帯端末4から送信された携帯用IDコードと予め保存された作動用IDコードとの照合を行うIDコード照合手段と、照合手段によってIDコードの照合が成立したときに制御装置5による通常制御を許可すると共に照合が不成立のときに通常制御を許可しない制御制限手段とを備えている。
(もっと読む)
農作業機
【課題】作業者の負担を軽減できる農作業機を提供する。
【解決手段】農作業機1は、トラクタの後部に連結する機体2を備える。機体2には、耕耘体を回転可能に設ける。機体2には、整地体4を上下方向に回動可能に設ける。農作業機1は、整地体4の状態を表示する状態表示手段80を備える。
(もっと読む)
作業車両のエンジン負荷制御装置
【課題】作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供する。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
(もっと読む)
作業機のアンロード装置
【課題】油圧アクチュエータの停止時に油圧ポンプからの圧油を切換弁によってアンロード油路に流出させる作業機のアンロード装置を安価に得る。
【解決手段】切換弁102の背圧室から排油路104に圧油排出させる開き状態と圧油排出を停止する閉じ状態とに切り換え自在な開閉弁105、開閉弁105をパイロット油圧によって切り換え操作する制御弁107を備えてある。アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を駆動するべく操作されると、制御弁107が開閉弁105を閉じ状態に切り換え操作し、アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を停止するべく操作されると、制御弁107が開閉弁105を開き状態に切り換え操作する。
(もっと読む)
ロータリ耕耘機
【課題】 構成部材が少なく構造が簡単で製造費が安上がりになり、しかも支持フレームの高さ設定を容易にすることができるロータリ耕耘機を提供する。
【解決手段】 支持フレーム9には、左右一対の揺動アーム81と、接地部材7,8を支持するツールバー83とが備えられ、一方の揺動アーム81に支持フレーム9の揺動高さを示す目盛り96が前後方向に設けられ、枢支軸84の上方位置の機枠4に連動杆98の前上側が左右方向の支軸99廻りに上下揺動自在に支持され、連動杆98の後下側には、左右方向に屈曲されかつ前記一方の揺動アーム81に上側から接当される接当部101が形成され、かつ接当部101自体に又はその近辺に目盛り96と対向する指標部101aが形成され、前記指標部101aが揺動アーム81の上下揺動に連動して前記目盛り96に沿って前後に移動自在とされている。
(もっと読む)
代かき作業機の耕深表示装置
【課題】代かき作業時に耕深を一定にすることができる耕深表示装置を提供する。
【解決手段】耕深表示装置40は、機体5に回転自在に支持された耕耘ロータ13の上部を覆うシールドカバー13と、この後部に上下方向に回動自在に配設されて耕耘ロータ13により耕耘された耕土を整地する第1整地板11と、この後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備える代かき作業機1に設けられる。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され、耕耘ロータ13により耕耘された耕土の耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動自在な揺動アーム42と、揺動アーム42の回動に応じて耕深を表示する耕深表示部50とを有してなる。
(もっと読む)
トラクタの耕深自動制御装置
【課題】本発明では、トラクタの耕深自動制御装置において、安定した耕深を維持して作業を続けられるようにすることを課題とする。
【解決手段】作業機2をリフトアーム17で昇降可能にトラクタ1に装着し、作業機2を昇降するリフトアーム17に設けるリフトアームセンサ30と端部が接地しながら作業機2の対地作業機構20を覆う作業機カバー23の昇降位置を検出するカバーセンサ29を設け、該カバーセンサ29の検出する対地作業機構20の耕深を設定耕深値となるようにカバーセンサ29の検出耕深値に基づくカバー耕深制御を行い、このカバー耕深制御の間にリフトアームセンサ30が検出する作業機位置検出値を制御基準値として記憶し、以後リフトアームセンサ30が検出する作業機位置検出値が制御基準値となるようにリフトアーム耕深制御で昇降制御してなるトラクタの耕深自動制御装置とする。
(もっと読む)
作業車両
【課題】本発明の課題は、前後進レバーによる面倒な前後進切替操作をなくし、単純なスイッチ操作のみで前後進の切り替えが行え、作業位置の位置合わせが容易に行える装置を具現することにある。
【解決手段】本発明は、走行車体(1)の後部に装着した作業機(10)を昇降可能に設け、この作業機(10)を昇降操作する昇降レバー(12)のグリップ部(12a)に押し込み操作時にのみ作動可能なスイッチ(13)を設け、該スイッチ(13)は現在の機体の進行方向を変更するように構成してあることを特徴とする作業車両とする。また、スイッチ(13)のスイッチ押し込み時は、車速を予め設定されたコントローラ設定値まで下げる構成とする。また、スイッチ(13)の押し込み操作時には、後進時における車速を段階的に下げる構成とする。
(もっと読む)
セミクローラ型作業車両
【課題】セミクローラ型作業車両において、左右クローラ走行装置を持ち上げ支持し、泥の落下を防止しながら路上走行をすることを課題とする。
【解決手段】作業車両の機体前側部には左右前輪を、機体後部には左右クローラ走行装置を設けたセミクローラ型作業車両において、機体後部に作業機昇降用のリフトアーム及び作業機連結用の三点リンク機構を設け、該三点リンク機構の左右ロワーリンクに、前後方向に長い左右持ち上げ棒を取り付け、左右ロワーリンクの前端部よりも前方へ突出する左右持ち上げ棒の前側部位に左右接地輪体を設け、左右リフトアームにより左右ロワーリンクを上方へ回動させると、左右持ち上げ棒の左右接地輪体により左右クローラ走行装置を地面から浮上させて支持することを特徴とするセミクローラ型作業車両とする。
(もっと読む)
作業車両
【課題】油圧昇降装置及び調整バルブの操作部についてのレイアウトの自由度を向上させた作業車両を提供する。
【解決手段】トラクタ(作業車両)は、車体と、昇降部50と、調整ノブ25と、伝達部90と、調整バルブ70と、を備える。昇降部50は、車体の後部に取り付けられる作業機を、作動油を用いて昇降可能である。調整ノブ25は、操作力(回転力)を加えることが可能である。伝達部90は、細長い形状に構成され、調整ノブ25に加えられた操作力を伝達することが可能であり、長手方向が変化する箇所を少なくとも1つ有する。調整バルブ70は、伝達部90から操作力が伝達されることで、昇降部50に供給される作動油の流量又は昇降部50から排出される作動油の流量を調整可能である。
(もっと読む)
トラクタの作業機昇降装置
【課題】操縦席から上げ側ストッパを移動調節するだけの簡単な設定動作により、リフトアームの上方回動高さの規制を能率よく正確に行うことができるトラクタの作業機昇降装置を提供する。
【解決手段】ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置であって、ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールアーム17、又はポジションコントロールアーム17とポジションコントロールレバー15にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設けた。
(もっと読む)
トラクタの作業機掘り深さ自動制御装置
【課題】本発明では、地面を掘りながら進行する作業機を牽引したトラクタの作業機掘り深さ自動制御装置において、掘り深さを自動的に設定深さに維持するに、設定掘り深さを浅くしても外乱要素によって作業機が頻繁に昇降しないように制御することを課題とする。
【解決手段】トラクタ1で牽引する作業機2の対地掘り深さHを適宜の設定対地掘り深さH0に設定し、実際の対地掘り深さHが設定対地掘り深さH0の許容振れ幅Kからずれても一定の猶予時間Tだけそのずれを放置するよう制御し、設定対地掘り深さH0が浅い場合には深い場合よりも猶予時間Tを長くして、猶予時間Tの経過後に作業機2の位置を設定対地掘り深さH0に修正するように制御したことを特徴とするトラクタの作業機掘り深さ自動制御装置とした。
(もっと読む)
作業機連結装置の電力供給回路
【課題】 連結枠に作業機を連結状態にして初めてトラクタ本体の電源と連結枠側の接続端子とが接続できるようにする。
【解決手段】 連結枠側ハーネス67と作業機側ハーネス68との一方に雄コネクタ72が設けられ、他方に前記雄コネクタ72と結合可能な雌コネクタ71が設けられ、連結枠11と作業機12とが連結位置に至たるときに連動して雄コネクタ72と雌コネクタ71とが結合する作業機連結装置の電力供給回路であって、連結枠側ハーネス67のコネクタとトラクタ車体1の電源との間に電源用スイッチ回路101が設けられ、作業機12が連結枠11に連結されたことを検出して電源用スイッチ回路101を閉じる連結検出センサ108が設けられている。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
作業車両
【課題】走行機体の左右傾斜に拘わらず作業機を圃場面に対して予め定められた左右傾斜姿勢で保持させる左右傾斜制御を行う作業車両であって、低コストで、精度の高い左右傾斜制御を実行することが可能な作業車両を提供する。
【解決手段】前輪1側のフロントアクスルケース23の左右傾斜によって走行機体3が左右傾斜することを抑制するために、走行機体3をフロントアクスルケース23に左右傾斜可能に支持し、フロントアクスルケース23の左右傾斜角を検出する前輪側傾斜角検出手段と、走行機体3の走行速度を検出する車速検出手段とを設け、制御部は、前輪側傾斜角検出手段によって事前に検出されたフロントアクスルケース23の左右傾斜角と、車速検出手段からの検出結果とによって、走行機体3のその後の左右傾斜角を予測し、予測結果及び傾斜角検出手段36の検出結果に基づいて左右傾斜制御を実行する。
(もっと読む)
作業車両
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
トラクタの作業機昇降制御装置
【課題】負荷率に応じて目標耕深を補正するにあたり、耕耘深さの急激な変化を回避すると共に、負荷率の回復を早めて耕深制御への復帰を促す。
【解決手段】耕深自動制御中に、エンジンENGの負荷率Lが所定値Iを超えたとき、目標耕深を補正してエンジンストールを防止する目標耕深補正手段を備えるトラクタの制御部20において、エンジンENGの負荷率Lが所定値Iを超えたとき、目標とする負荷率Hと現在の負荷率Lとの偏差に比例する比例制御量Tを算出すると共に、該比例制御量Tと前回の補正値Eとの差分Dを積分して目標耕深の補正値Eを決定するにあたり、負荷率Lの減少が見られないときは、それまでの積分値Kに差分Dを加算して補正値Eを決定し、負荷率Lの減少が見られるときは、それまでの積分値Kから差分Dを減算して補正値Eを決定する。
(もっと読む)
1 - 20 / 182
[ Back to top ]