
Fターム[2B304LB09]の内容
農作業機用昇降装置 (9,026) | 作業機、作業部の配置、連結 (1,078) | 作業機、作業部の配置 (600) | オフセット装着 (19)
Fターム[2B304LB09]に分類される特許
1 - 19 / 19
草刈作業機
【課題】トラクタの運転席から容易に草刈作業部を操作可能とした草刈作業機を提供する。
【解決手段】草刈作業機において、オフセット機構部と回動機構部の作動は、トラクタ運転席近傍に設けたジョイスティックレバー861の操作によって行われる。また、草刈作業部5が装着部2に対し水平状態を含む一定の角度範囲のときのみトラクタ後方位置へ移動可能に牽制手段が設けられている。さらに、自動収納スイッチ862を備え、自動収納スイッチ862を操作すると自動的に草刈作業部5が水平位置に回動するとともに、トラクタ後方の収納位置へ水平移動する制御部を備えた草刈作業機による。
(もっと読む)
農作業機のリモコン装置

【課題】作業者に合うオフセット位置に作業部を容易に移動可能な農作業機のリモコン装置を提供する。
【解決手段】リモコン装置100は、作業部のオフセット位置を記憶する指令信号を送る作業位置記憶スイッチ101aと、農作業機の各種作動を制御する指令信号を送る指令スイッチと、各種作動を制御する指令信号データを記憶する記憶部111と、スイッチ101aや指令スイッチのオン時に指令信号データを記憶部111から読み込んで通信部112に送る制御部110を備える。制御部110は、スイッチ101aとスイッチ101bのオン時に、作業部のオフセット位置を記憶させる指令信号データを記憶部111から読み込み、その後のスイッチ101bのオン時に、作業部を現位置から記憶されるオフセット位置に移動させる指令信号データを記憶部111から読み込む指令信号データ選択部112aを有する。
(もっと読む)
オフセット作業機
【課題】トラクタにオフセット作業が行えるように装着された作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体の後方にこの走行機体に対して水平回動自在に架設された伝動フレーム9の先端部に水平回動自在に支持された作業部支持・伝動フレーム13に装着され、走行機体の走行位置に対して側方にオフセットした位置で、走行機体の走行にともなって前進作業し、畦に沿ったまま、走行機体に対する、伝動フレーム9の水平回動と作業部支持・伝動フレーム13の水平回動の2通りの動きの自由度を有する作業部51と、
作業部51の位置及び方位を検出するセンサからの情報に基づいて作業部51の前記2通りの水平回動の量を独立して無段階に制御し、走行機体の旋回をともなう前進動時に作業部51を畦に沿わせたまま、その、圃場の隅部付近までの直進性を維持させる制御手段を備える。
(もっと読む)
オフセット作業機の作業方法
【課題】走行機体にオフセット作業が行えるように装着された作業機が、走行機体の移動と作業機自身の水平面内での回動及び移動により、圃場の作業部分から隅部分までの仕上げ作業が連続して行えるようにする。
【解決手段】走行機体2の前進走行に伴って前進する作業機1を一方の側にオフセットさせたときに、前記作業機1がその作業機1に介装された2種類の電動シリンダまたは油圧シリンダの伸縮により水平面内での前記走行機体2に対する2以上の水平回動の自由度を有するオフセット作業機を用い、前記走行機体2が前進走行しながら旋回したときに、前記作業機1に取り付けられた位置方位センサ20からの検出情報に基づいて前記2種類の電動シリンダまたは油圧シリンダの伸縮作動を自動制御することにより前記作業機1を水平面内で2以上に水平回動させながら、前記走行機体2に対する姿勢を連続的に順次変化させて前記作業機1自体の直進性を維持する制御を行う。
(もっと読む)
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
農作業機
【課題】本発明は、上記課題に鑑みて、トラクタに装着され、トラクタの基本情報及びトラクタの状態情報に基いて適切に制御可能な動作部を有する農作業機を提供することを目的とする。
【解決手段】制御部3は、あらかじめ記憶部に記憶されたトラクタに関する情報であるトラクタ基本情報101に基づき計算される基本動作パターンをトラクタから取得したトラクタ状態情報102により修正して実動作パターンを計算し、実動作パターンに基づいて、検出部8からの情報により動作部で目的の動作をさせるためにアクチュエータ7の稼動を制御することで上記課題を解決する。
(もっと読む)
畦成形機
【課題】圃場が軟弱となった場合、走行機の旋回が理論上の軌跡から大きく逸脱してしまう確率が高く畦成形作業部の位置や姿勢を正しくコントロールできなかった。
【解決手段】装着フレーム1に対し第1水平回動手段21によって水平回動自在に設けられた支持フレーム2と、支持フレーム2に移動可能に設けられるとともに、水平移動手段4によって装着フレーム1に対して遠近移動可能であり、かつ遠近移動可能である第2水平回動軸54を中心に第2水平回動手段による回動又はフリー回動によって水平方向に回動可能である畦成形作業部5とを有し、走行機Tを停止して畦成形作業部5を走行機の側方において走行方向に移動させて畦成形作業を行なうことが可能である畦成形機による。
(もっと読む)
農作業機
【課題】簡便で低コストの構造で、作業者の操作及び技量によらず作業部が元畦に追従するように機能させるか否かの選択が可能な畦塗り機を提供することを目的とする。
【解決手段】少なくとも作業部40の作業時において作業部40が被作業面に対して接離する方向に移動可能とするリンク機構に、ピストンで分断された、一方のシリンダ室の圧力を他方のシリンダ室の圧力より高く設定した油圧シリンダ15を、作業部40が被作業面側に向けて付勢されるように装着し、油圧シリンダ15の油圧回路中には、圧力を高く設定した方のシリンダ室の圧力が一定圧力以上となった場合に減圧させるための弁と、当該減圧させるための弁をバイパスするバイパス回路と、当該弁を経由するかバイパス回路を経由するかを決定する切換バルブとを設けたことにより上記課題を解決する。
(もっと読む)
農作業機
【課題】簡便で低コストの構造で、作業者の操作及び技量によらず容易に被作業面に作業部を追従させることができる農作業機を提供する目的とする。
【解決手段】装着部11と作業部40は、少なくとも作業部40の作業時において作業部40が被作業面に対して接離する方向に移動可能とするリンク機構により連結され、ピストンで分断された、一方のシリンダ室の圧力を他方のシリンダ室の圧力より高く設定した油圧シリンダ15を、作業部40が被作業面側に向けて付勢されるようにリンク機構に装着し、ピストンの圧力を高く設定した方のシリンダ室の圧力が一定圧力以上となった場合に減圧させるための弁56を油圧シリンダの油圧回路中に設けることにより上記課題を解決する。
(もっと読む)
オフセット作業機の制御装置及び制御方法
【課題】走行機体に装着され、走行機体の進行に沿ってオフセット位置で作業を行うオフセット作業機に対して、圃場の隅部までの連続的な前進作業を可能にする。
【解決手段】走行機体に装着された作業可能な作業部120を備え、作業部120の作業位置調整機構140と、作業部120の作業方向調整機構141とを有するオフセット作業機100であって、作業位置調整機構140と作業方向調整機構141とを駆動制御する制御手段160と、作業部120の作業方向検出手段150、作業部120の作業位置検出手段151を備え、制御手段160は、設定された作業方向の基準値A0と作業方向検出手段150によって検出された作業方向の検出値との比較に応じて作業方向調整機構141を調整駆動し、設定された作業位置の基準値X0と作業位置検出手段151によって検出された作業位置の検出値との比較に応じて作業位置調整機構140を調整駆動する。
(もっと読む)
作業車両のアーム型作業機
【課題】農用作業車両の複数箇所にロボットアームを装着可能に構成し、ロボットアームにより複数の作業を円滑に実行する。
【解決手段】縦軸(22c)回り及び横軸(22d)回りに回動自在な第一アーム(23)と、この第一アーム(23)の先端部に屈折自在に連結している第二アーム(24)とでロボットアームを構成する。ベース部材(22)に前記第一アーム(23)を前記縦軸(22c)回りに回動自在に支持し、トラクタ(1)の機体前側部と左右側部にベース部材(22)の取付部(21a,21b)を設け、第二アーム(24)の先端部に複数の補助作業装置(26,…)を取り付け可能に構成する。
(もっと読む)
走行機に連結される農作業機
【課題】 直線状の畦の形成や水田等の圃場の作業残隅部の作業において、トラクタの操作や蛇行などでその形成が正確に行えない場合があった。また圃場の作業残隅部の作業処理は、その作業がトラクタを反転させる等の困難な作業が多かった。
【解決手段】 装着フレーム1と、作業部3と、装着フレーム1と作業部3とをそれぞれ水平方向回動可能に連結して伸縮可能な回動アーム部2と、回動を制御する制御部4と、制御部の操作部5とを有し、装着フレーム1側のアーム回動軸14より前方位置と回動アーム部2の作業部3側とにスプリング72により伸長方向に付勢され伸縮する連結ロット7を掛け渡し、走行機が蛇行した時や進行方向と直交する面の作業時の作業部の直進性を自動的に補正する。
(もっと読む)
畦塗り機
【課題】効率よく作業ができる畦塗り機を提供する。
【解決手段】畦塗り機1は、土を耕耘して盛り上げる盛土体21と、土を締め固めて畦を形成する畦形成体31とを備える。盛土体21および畦形成体31は、これら盛土体21および畦形成体31に対して共通する1つの基準面に沿って移動することにより、トラクタの前進走行に基づいて作業をする右突出作業状態およびトラクタの前進走行に基づいて作業をする左突出作業状態に切換え可能となっている。
(もっと読む)
走行機に連結される作業機
【課題】 水田等の圃場の作業残隅部の作業処理は、その作業がトラクタを反転させる等の困難な作業が多かった。また、畦等の被作業面が直線でない場合や、草や樹木などの異物がある場合正確に作業が行えない課題があった。
【解決手段】 作業機Aは、装着フレーム1等に設ける回動支点14を中心に回動可能かつ伸縮可能な回動部2と、回動部2に設けた作業部回動支点32を中心に回動可能な作業部3と、回動部2の回動変位量及び伸縮量と作業部3の回動変位量とを制御する制御部4と、制御部4を操作可能な操作部5を有し、作業部3は、走行機Bを走行させた状態で走行機Bの進行方向にほぼ平行な面を作業面34aとして作動することが可能であり、かつ走行機Bの後方に位置させた状態で走行機Bの進行方向とほぼ直交する面を作業面34bとして作動することが可能である。
(もっと読む)
走行機に連結される作業機
【課題】 直線状の畦の形成や水田等の圃場の作業残隅部の作業において、トラクタの操作や蛇行などでその形成が正確に行えない場合があった。またトラクタを旋回させつつ正確な圃場の隅部作業を行うことはできなかった。
【解決手段】 この発明の走行機Bに連結される作業機Aは、装着フレーム1と、作業部3と、装着フレーム1と作業部3とを連結する連結部2と、制御部4と、操作部5とを有し、連結部2は、装着フレーム1に設ける回動支点14を中心に水平方向に回動可能であるとともに装着フレーム1と作業部3間の距離を伸縮可能に設けられており、作業部3が被作業面Dから受ける反力を検知して、作業部3が被作業面Dに作用する圧力を一定範囲になるように連結部2を伸縮させることが可能である。作業部3の実施例としては、連結部2に設けた作業部回動支点32を中心に水平方向に回動可能とすることもできる。
(もっと読む)
畝立装置
【課題】従来の畝立装置で畝立幅を変更する場合は、左右方向に配するツールバーに対し、側板(培土板)の位置を手動により付け替える構成であったので、これら培土板に泥土が付着している場合は衣類を汚したり、可動部に土が詰まっている場合は、大きな労力を要するという課題が有った。
【解決手段】左右培土板1,2を取付けるツールバー3の一端をスライド式に構成する。ツールバー3全体をトラクタ後方のフレーム部材5に対し左右方向にスライド自在に設ける。前記フレーム部材5にアクチュエータ4を備え、このピストン部を前記ツールバー3のスライド部33に連結する。スライド部33を固定して前記アクチュエータを駆動すると、ツールバー全体が左右に移動し畝立位置(中心位置F)を調整できる。また前記スライド部33の固定を解除して前記アクチュエータを駆動すると、ツールバーの一端が伸縮し畝立幅を調整できる。
(もっと読む)
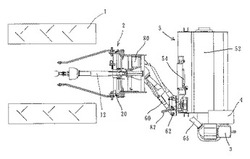
畦塗り作業機
【課題】 移動時の走行機体と作業機の前後バランスを向上させ、精度の良い畦塗り整形作業を提供する。
【解決手段】 畦塗り作業機は、走行機体に装着される装着部と、これから左右方向に移動可能なオフセット機構部と、この移動端側に配設された動力伝達軸51の回転中心を回動支点Oとして水平方向に回動可能に配設されて前処理体21及び整畦体40を有してなる作業部20と、走行機体からの動力によって作業部20を回転駆動させる動力伝達機構部50とを備える。回動支点Oは、平面視において整畦体40の回転中心軸と前処理体21の回転中心軸との交点O'上に配置される。動力伝達機構部50は、回動支点Oよりも走行機体の進行方向前側に動力分岐部65を備え、動力分岐部65を介して動力が整畦体40に伝達される。動力分岐部65は整畦体40の多面体ドラム41内側に配設される。
(もっと読む)
農作業機
【課題】動力伝達軸体の折れ角度を一定に維持できる農作業機を提供する。
【解決手段】農作業機1は、前進作業位置および後退作業位置に移動可能で土作業手段2を支持する可動機枠21を備える。農作業機1は、可動機枠21に対して回動可能で中間入力軸14を支持する中間入力軸支持体15を備える。中間入力軸支持体15には、動力伝達軸体23の折れ角度が一定になるように可動機枠21との当接により可動機枠21に対する中間入力軸支持体15の回動を規制する回動規制体61を設ける。
(もっと読む)
農作業機
【課題】 農作業機を小型・軽量化し、作業部の手動による移動操作を容易にする。
【解決手段】 溝掘り機1は、走行機体90の後部に装着される装着部10と、これに配設されて走行機体90の側方に移動可能なオフセット機構20と、この後端部に水平回動自在に配設されて溝掘り作業を行なう作業部50を有する。オフセット機構20はヒッチフレーム11、上スイングアーム21、下スイングアーム22、オフセットアーム27、リヤアーム24を有して平行リンク機構を形成する。作業部50はリヤアーム24に取り付けられた支持軸35から横方向へ延びるフレーム部51を備える。上スイングアーム21及びフレーム部51は強度メンバーとして機能し、これらの動力伝達機構部は上スイングアーム21及びフレーム部51と独立して設けられる。オフセット機構20の移動及びフレーム部51の回動によって、作業部50は所望の作業位置に設置可能である。
(もっと読む)
1 - 19 / 19
[ Back to top ]