
Fターム[2B304MA02]の内容
Fターム[2B304MA02]の下位に属するFターム
位置制御(ポジション制御) (157)
デプス制御、刈高制御 (92)
Fターム[2B304MA02]に分類される特許
41 - 60 / 226
トラクタの油圧システム
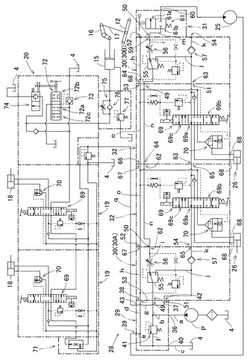
【課題】車体の前後に装着された前後のインプルメントで複合作業を行う場合の作業効率のアップを図ることができる油圧システムを提供する。
【解決手段】トラクタ1の車体5の後部に装着される後装インプルメントを昇降させるための後装インプル用油圧シリンダ15を制御する昇降制御弁20と、車体5の前部に装着される前装インプルメントに装備された油圧アクチュエータ25,26を操作する前装インプル用コントロールバルブ31,32とを備え、昇降制御弁20と前記前装インプル用コントロールバルブ31,32とに圧油を供給する油圧ポンプPを車体5に装備し、この油圧ポンプPから吐出されて前装インプル用コントロールバルブ31,32へと供給される圧油を確保した上で、該油圧ポンプPから吐出される圧油の残りを昇降制御弁20へと供給すべく油圧ポンプPの吐出油を分流するフローコントロールバルブ30Aを設ける。
(もっと読む)
多目的小型電動式トラクター

【課題】畑作農作業のほとんどを機械化でき、密閉された空間でも作業が可能な多目的小型電動式トラクターと、ユニット化した小型農機具を提供する。
【解決手段】多目的小型電動式トラクター1は、荷物及び各農機具ユニットを載せる荷台8を有し、荷台8を載せる車体フレーム2にはロボットアーム10が設けられている。一対の駆動前輪3a、3bと一対の前輪駆動モータ4a、4bと一対のフリー回転の後輪9a、9bを有し、車体フレーム2に搭載されているウィンチワイヤー巻き取りドラム11と、ドラム駆動するモータ12を有している。荷台8は小型農機具ユニットを搭載して、荷台高さ調整モータ5で上下に移動可能になっている。ロボットアーム10は360度回転可能で3箇所に関節が設けられ、手首は360度回転可能で物体を挟むことが出来る。また手首部分は取り外し可能で、別種の農具を付け替えることが出来る。
(もっと読む)
無線受信制御装置
【課題】走行機体に搭乗した作業者が操作する無線指令装置からの指令信号を確実に受信し、装置内部への水の浸入を防止可能な無線受信制御装置を提供する。
【解決手段】走行機体の後部に装着される耕耘作業機1に設けられ、耕耘作業機1に搭乗した作業者が操作する無線指令装置から送信される無線方式の指令信号を受信しこの信号に応じて耕耘作業機1の作動を制御する無線受信制御装置70であり、耕耘作業機1に設けられた取付板71と、内部に形成された収容凹部の開口部が取付板71に面して塞がれた状態で取付板71に設けられた制御ボックス82と、収容凹部内に収容され、無線指令装置からの指令信号を受信するアンテナが基板上に形成された電子基板100を備え、制御ボックス82は、耕耘作業機1の作業姿勢時において、電子基板100が耕耘作業機1に搭乗した作業者側を向いて取付板71に設けられる。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
苗移植機
【課題】畦越えなどしようとして、苗植付装置を上昇させるときにエンストを起こさないようにすることができる苗移植機を提供すること。
【解決手段】車体の後側に昇降リンク装置2を介して昇降可能に装着された苗植付装置3を接地する作業位置まで下降させる操作と対地浮上する所定の非作業位置まで上昇させる操作が行える昇降操作装置110bと苗植付装置を任意の高さに上昇させることができる任意上昇操作装置110cを設け、任意上昇操作装置110cを操作すると、その上昇操作量に応じてエンストさせないようにエンジン12のアイドリング回転数を上昇させ、昇降操作装置110bを操作するとエンジンのアイドリング回転数を上昇させる作動状態であると、それを解除してアイドリング回転から元の通常回転に戻るようにしたので、畦越えしながらの植付時、エンジン12のアイドリング回転数が上昇するので、走行負荷に対処でき、エンストを防止できる。
(もっと読む)
コンバイン
【課題】単純な操作により自動昇降制御を行うために、刈取作業中に誤操作をしてしまい未刈り穀稈を踏み倒す可能性があった。
【解決手段】自動昇降指令する自動昇降操作手段(20)を設け、制御手段(21)は、自動昇降操作手段(20)の操作を入力中に前処理操作検出手段(22)による昇降操作レバー(11)操作を入力すると、前処理高さ検出手段(25)の入力に基づいて前処理部(5)が設定目標位置まで自動昇降するように、昇降駆動手段(4)を昇降操作レバー(11)の操作方向に駆動制御する。
(もっと読む)
移植機
【課題】新たな油圧バルブや操作手段を設けることなく植付装置の下降速度を遅くすることを可能とした移植機を提供する。
【解決手段】乗用田植機1は、油圧モードとされた際、植付装置30を昇降駆動する際の通常の速度より遅い速度によって植付装置30を下降させる遅速制御位置48と、油圧シリンダ21の下降を停止させる停止位置49とを設けた油圧感度調節ダイヤル16を備えので、油圧モードに切換えられた際、即ちメンテナンス時等の際にも、新たに操作手段を設けることなく、通常よりも遅い下降速度によって植付装置30を下降させることができる。
(もっと読む)
作業機系油圧構造
【課題】単一油圧源から油圧昇降機構及び油圧傾斜機構に作動油を供給する作業機系油圧構造の小型化を図る。
【解決手段】単一油圧源からの作動油を油圧昇降機構及び油圧傾斜機構に分配する分流弁がシリンダヘッドに内装される。好ましくは、シリンダヘッドは電磁リフトバルブユニットとは反対側に延在部を有する。分流弁及びパイロットチェック弁が延在部に内装され、傾斜用電磁弁が延在部の上面に装着される。パイロットチェック弁が介挿された状態で傾斜用電磁弁及び油圧傾斜機構の間を接続する傾斜用伸長ライン及び圧縮ラインは、傾斜用電磁弁及びパイロットチェック弁を接続する延在部に形成された傾斜用上流側伸長油路及び圧縮油路と、上流側端部がパイロットチェック弁に接続され且つ下流側端部が延在部の車輌幅方向第2側の側面に開口して傾斜用伸長ポート及び傾斜用圧縮ポートを形成する延在部に形成された傾斜用下流側伸長油路及び圧縮油路とを有する。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降されるように構成した場合、作業装置が下降されるタイミングのばらつきを抑える。
【解決手段】機体の旋回が開始されてから前輪1の操向角度を検出する角度センサー31の検出値が操向限度B側から設定角度A2に達すると、又は機体の旋回が開始されてからの機体の走行距離を計測する距離センサー27の計測値が設定距離に達すると、又は機体の旋回が開始されてからの時間の経過を計測するタイマーの計測値が設定時間に達すると、上昇状態の作業装置が地面まで自動的に下降されるように構成する。
(もっと読む)
トラクタ
【課題】トラクタに作業機を連結する作業、或いは作業機を清掃する作業等において、作業者が地上に降りた状態であっても迅速にエンジンを停止させたり、或いはPTOクラッチを切り操作することができるようにする。
【解決手段】制御装置は、指令スイッチの何れか一つのスイッチが単独で入りとなった際には、ヒッチ機構を昇降又は傾斜させ、また、二つの指令スイッチが共に入りとなった際には、エンジンを停止させ、或いはPTOクラッチを切る。
(もっと読む)
作業車
【課題】作業装置の作動形態を設定しての制御を終了した後、再び元の作動形態での制御を行う際や、作業装置の作動形態の設定を行ってから、再度の作動形態の設定を行う際の操作を簡便に行えるようにする。
【解決手段】制御手段101,102,103,104,105による制御作動の入り状態と切り状態とを択一選択可能な切換スイッチ67による制御作動の切り操作に基づいて、制御手段101,102,103,104,105による制御の終了時点における作動形態を不揮発性メモリに記憶する記憶手段106を備え、かつ、切換スイッチ67による制御作動の入り操作に基づいて、各作業装置5,11,30,31を記憶手段106に記憶された作動形態に復元させる。
(もっと読む)
作業車輌の操作部構造
【課題】運転席の機体幅方向一方側に、レバーガイド、人為操作可能な複数の操作部材及びアームレストが配置された作業車輌の操作部構造であって、前記操作部材の操作性を向上させつつ前記操作部材に対する誤操作を防止し得る作業車輌の操作部構造を提供する。
【解決手段】レバーガイド97は、運転席92及び前記運転席92の機体幅方向一方側に配置されたフェンダ91の間に延びる床部材94と前記フェンダ91とに跨るように構成されている。また、アームレスト93は、操縦者が腕を載置可能なアームレスト本体931が前記レバーガイド97より上方で且つ前記レバーガイド97の機体幅方向中途部に位置するように構成されている。前記アームレスト本体931を挟んで機体幅方向内方側及び外方側には、それぞれ少なくとも一つの操作部材72,73が配置されている。
(もっと読む)
移植機
【課題】植付作業機を昇降作動させる油圧シリンダの伸縮制御装置を電磁制御弁を用いて安価に構成する。
【解決手段】ステアリングホイール8の近傍に設けた植付作業機13の昇降操作具28による植付クラッチの入切操作を可能にするクラッチ操作可能モードと、植付クラッチの入切操作を不能にするクラッチ操作不能モードとに切換えできるモード切換手段33を設けると共に、前記クラッチ操作不能モード下では、当該昇降操作具28による電磁制御弁25a,25bを介しての植付作業機13の緩速昇降作動を可能にした。
(もっと読む)
コンバイン
【課題】クローラ走行跡に水が溜まり難くして、クローラ走行跡の土壌の軟弱化を防止し、圃場の走行性を向上させる。
【解決手段】左右一対のクローラ走行装置17を備えるコンバイン1において、各クローラ走行装置17の後方に、圃場のクローラ走行跡に排水用の溝を形成する溝切装置24を設ける。これにより、クローラ走行跡に確実に排水用の溝を形成することができ、その結果、クローラ走行跡に水が溜まり難くなる。また、溝切装置24は、機体に対して昇降可能に設けると共に、前処理部2の昇降に連動して自動的に昇降制御される。これにより、オペレータの操作負担を軽減できるだけでなく、圃場端で機体を回行するときに溝切装置24が破損する不都合も回避できる。
(もっと読む)
移植機
【課題】植付作業機の上昇操作を行う上昇操作具を変速レバーの把持部に設けて操作性を向上させた移植機において、オペレータの意図しない植付作業機の上昇を防止することを課題とする。
【解決手段】本発明は、走行機体3の後部に昇降可能に連結された植付作業機7と、植付作業機7の昇降制御を行う制御部23と、走行変速操作を行う変速レバー18の把持部18aに設けられて植付作業機7の上昇操作を行う上昇操作具24とを備えた移植機において、走行速度を検出する速度検出手段41を設け、制御部23が、上昇操作具24の植付作業機7上昇操作による植付作業機7の上昇作動を規制する規制モードを有し、速度検出手段41によって走行速度が所定速度以上になったことが検出されると、上記規制モードから、上昇操作具24の植付作業機7上昇操作による植付作業機7の上昇作動を許容する許容モードに移行する。
(もっと読む)
作業機
【課題】着脱ヒッチ部を介して装着した作業部の稼動時における支持強度を向上するとともに、作業部の昇降制御特性を容易に設定することができる作業機を提供する。
【解決手段】作業機は、走行部(2)の後部に、昇降機構(201)とヒッチ機構(202)とからなる着脱ヒッチ部(3)を支持し、この着脱ヒッチ部(3)から後方に延びる支持フレーム(203)を介して作業部(4)を支持して構成され、上記昇降機構(201)は、上下のリンク(201a,201b)によって構成し、かつ、上記支持フレーム(203)は、作業部(4)を作業高さ位置に昇降した状態の昇降機構(201)のリンク方向の延長線上に構成したものである。
(もっと読む)
作業車のリフトアーム昇降構造
【課題】作業車のリフトアーム昇降構造において、キースイッチのOFF位置からON位置への操作後で且つエンジンの始動操作前の状態で、昇降操作具が誤って上昇側又は下降側に操作されてしまった場合、作業者の誤解を招かないように構成する。
【解決手段】キースイッチ43のOFF位置からON位置への操作後で、且つエンジンの始動操作前において、昇降操作具23が上昇側に操作されても、制御手段36による制御弁11の上昇側への操作が阻止される。エンジンの始動操作後において、昇降操作具23が上昇側に操作されると、制御手段36による制御弁11の上昇側への操作が許容される。
(もっと読む)
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
農業用トラクタ
【課題】農業用トラクタの各種設定操作の繁雑さを解消する。
【解決手段】走行ポジション(P1)では、前記車体の走行形態を「二駆」状態とし、且つ作業機昇降制御を切に設定し、耕耘ポジション(P4)では、前記車体の走行形態を「四駆」状態とし、且つ前記作業機昇降制御を入りに設定すると共に、前輪増速制御、オートリフト制御またはオートブレーキ制御を夫れ夫れ単独で選択できる設定具(9)を設け、前記設定器(9)を前記耕耘ポジション(P4)に操作すると、該設定具(9)により選択設定された前輪増速制御、オートリフト制御、又はオートブレーキ制御を強制的に入とするように構成し、かつ前記走行ポジション(P1)に切り替えたときの前記作業機昇降制御を切に維持した状態で「四駆」を設定可能に設けた。
(もっと読む)
苗植機
【課題】 苗植機のバックリフト制御において、エンジン回転を高くするのは、後進変速であるから、急速にエンジン回転が上げられて危険性を伴ったり、燃料消費を大きくして不経済となり易い。このようなバックリフト制御において、走行安全を図り、無駄を少くするものである。
【解決手段】 車体の後進走行操作によってエンジンの回転数を上げて苗植装置を上昇するバックリフト制御を行わせる苗植機において、この苗植装置が既に上昇位置にあるときは、前記エンジンの回転数の上昇を規制する。
(もっと読む)
41 - 60 / 226
[ Back to top ]