
Fターム[2B304MA07]の内容
Fターム[2B304MA07]に分類される特許
1 - 20 / 32
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
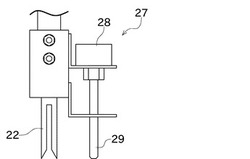
【解決手段】田植機は、土壌反力検出装置27と、植付爪22を備えた植付部と、土壌反力検出装置27の出力に基づいて苗の植深を算出する制御部と、を備えている。土壌反力検出装置27は、植付爪22に生じる土壌反力を検出する。また土壌反力検出装置27は、植付爪22の近傍に配置されるプローブ29と、ロードセル28とを備える。前記プローブ29は、植付爪22の長手方向と平行に配置された棒状部材であり、その一端側は植付爪22の先端と同じ方向を向くとともに、他端側はロードセル28の荷重検出面に当接している。
(もっと読む)
田植機

【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
作業車の供給物補給構造
【課題】作業装置の供給物補給高さ位置への無理な下降操作で作業装置が損傷するなどの不都合の発生を阻止する。
【解決手段】走行車体の後部に供給物を圃場に供給する作業装置を昇降可能に装備し、作業装置への供給物の補給を要する状態を検知した場合に、作業装置を作業高さ位置から予め設定した供給物補給高さ位置まで自動昇降させる補給用昇降制御を実行する制御手段を備えた作業車の供給物補給構造において、作業装置の接地を検知し、かつ、作業装置の高さ位置が供給物補給高さ位置よりも高いことを検知した状態で、作業装置への供給物の補給を要する状態を検知した場合には、制御手段が補給用昇降制御を実行しないように構成してある。
(もっと読む)
移植機
【課題】機体の前上がり傾斜が所定の傾斜角以上になる畦越え作業や、機体の後部に昇降自在に連結した植付作業機が圃場から脱出するぎりぎりの状態(植終い)までの植付作業を、オペレータが乗用型田植機に搭乗した状態で行えるようにする。
【解決手段】機体の前後方向の傾斜を検出するピッチングセンサ69が所定の傾斜角以上の機体の前上がり傾斜を検出している時、自動昇降制御中にはフロート23の基準姿勢を基準値かた前下がり状態に姿勢変更して自動昇降制御を継続し、自動昇降制御中でなければ植付を停止した状態でフロート23を接地させた植付作業機5の自動昇降制御を実行する制御手段61を設ける。
(もっと読む)
苗移植機
【課題】 本発明は、苗植付部の前後傾斜姿勢の制御は高精度で適正に行うことを課題とする。
【解決手段】 機体の走行の加減速を検出する走行加速度センサ(222)を設け、該走行加速度センサ(222)の検出に基づき、走行が加速されているときには苗植付部(4)を後上がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させ、走行が減速されているときには苗植付部(4)を後下がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させる制御装置を設けた苗移植機とした。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
圃場作業機、及び該圃場作業機をローダに取り付けて成る農業機械
【課題】ローダのリフトアームの先端に圃場作業機を取り付けて、圃場の環境や作業内容に柔軟に対応し、安定且つ安全に作業を行わせることのできる圃場作業機を実現する。
【解決手段】圃場作業機3の主フレーム38に作業具35〜37が取り付けられ、連結用主部材66の前端部は、主フレーム38に対してピッチング及びローリング可能に取付けられており、連結用主部材66の後端部に取り付けられた後部フレーム75に固定された取付支持板81のフック係合用ピン82に、ローダ2のリフトアーム10の先端に取り付けられたスナップヒッチ18のフックが係合され、取付支持板81の連結軸挿通孔とスナップヒッチ18の連結軸挿通孔とに連結用のボルト83が挿通されて、取付支持部材80がスナップヒッチ18に取り付けられる。
(もっと読む)
トラクタ
【課題】ロータリ耕耘装置の強制昇降時にはエンジンストールを招くことなくエンジンの回転速度を変更し得るトラクタを構成する。
【解決手段】ロータリ耕耘装置の強制上昇制御時には、遅延時間設定ダイヤル41で設定されている第1遅延時間が経過した後に回転速度変更手段52がエンジンEの回転速度を減ずる減速制御を行い、この上昇状態において強制下降制御を行う際には、回転速度変更手段52がエンジンの回転速度を復帰させる復帰制御を行い、強制下降制御を開始するタイミングで復帰制御を開始し、この後、遅延時間設定ダイヤル41で第1遅延時間とともに設定される第2遅延時間が経過した後にロータリ耕耘装置の強制下降制御を開始する。
(もっと読む)
田植機
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
乗用田植機
【課題】苗継ぎ時に、植付部を所定の高さまで上昇させるとともに、当該植付部を傾斜させることにより、苗継ぎ作業に必要な労力を低減することが可能な田植機を提供する。
【解決手段】走行部10と、走行部10の後部に具備され、植付作業を行う植付部30と、上部リンク52及び下部リンク53を備え、植付部30を走行部10に対して昇降可能に支持する昇降リンク機構50と、を具備する乗用田植機1において、上部リンク52を伸縮させることにより、走行部10に対する植付部30の相対角度θを変更する角度変更アクチュエータ52cと、昇降リンク機構50により、植付部30を所定の高さに調節するとともに当該高さで停止させ、角度変更アクチュエータ52cにより、植付部30の相対角度θを所定の相対角度θs−dβ1に調節する苗継ぎ制御を行う制御部100と、を備えた。
(もっと読む)
苗植機
【課題】本発明では、畦越えの走行速度を気にすることなく任意のスピードで畦越えをしても走行車体が不安定になることなく圃場の畦際まで適正な植付深さで苗を植付けられるようにすることが課題である。
【解決手段】走行車体の後側に苗植付部を装着した苗植機において、走行車体の前後傾斜検出手段と走行速度検出手段を設け、前後傾斜検出手段による走行車体の上向き傾斜の検出で畦越え植付昇降制御モードに移行し、この畦越え植付昇降制御モードでは走行速度検出手段が検出する走行速度の高低に応じて苗植付部の上昇速度を高低に変更制御するように苗植機の苗植昇降制御装置を構成した。
(もっと読む)
作業車両
【課題】走行機体に連結された作業機の姿勢を圃場の状態に応じて適切に制御し、なだらかでムラのない土壌の耕耘を行うことができる作業車両を提供する。
【解決手段】自動モードが選択されており(ステップS1:YES)ローリングジャイロセンサからローリング角速度ωを示す検出値が入力されているときに(ステップS2:YES)車速センサから車速vを示す検出値を取得し(ステップS3)車速vに対応する閾値f(v)を取得する(ステップS4)。そしてローリング角速度ωを示す検出値が閾値f(v)以上であるか否か判断し(ステップS5)ローリング角速度ωを示す検出値が閾値f(v)以上であるときは(ステップS5:YES)水平モードでロータリ耕耘機の姿勢を制御し(ステップS6)ローリング角速度ωを示す検出値が閾値f(v)未満であるときは(ステップS5:NO)平行モードでロータリ耕耘機の姿勢を制御する(ステップS7)。
(もっと読む)
刈取収穫機
【課題】 走行機体の水平基準面に対する前後傾斜角を設定傾斜角に維持しながら刈取作業を行うことが可能なものでありながら、刈取部が地面に突っ込むおそれを少なくすることが可能な刈取収穫機を提供する。
【解決手段】 刈取部10の対地高さが制御目標高さになるように刈取シリンダC1の作動を制御する刈取昇降制御並びに走行機体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段が、刈取部10が地面に近付く形態で走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させているときは、目標対地高さ設定手段にて設定される目標対地高さに対応させて定めた基準対地高さよりも前傾斜操作用設定量だけ高い値を制御目標高さとして定め、走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させていないときは基準対地高さを制御目標高さとして定める。
(もっと読む)
コンバイン
【課題】刈取部を実際の機体の姿勢に即した昇降位置に速やかに昇降させて、該刈取部の地面への突っ込みや高刈りを確実に防止する。
【解決手段】機体に昇降制御可能に支持した刈取部4と、該刈取部4を昇降手段により昇降制御する制御手段30とを備えるコンバイン1において、前記機体の水平基準面に対する前後傾斜角度を検出する傾斜角検出手段32と、前記機体のピッチングの角速度を検出する角速度検出手段33と、前記刈取部4の機体に対する昇降位置を検出する昇降位置検出手段35とを備え、前記制御手段30により傾斜角検出手段32の検出値と角速度検出手段33の検出値とに基づいて検出後の機体の姿勢を予測し、その予測結果に応じて設定した予測昇降位置まで前記刈取部4を昇降させる昇降制御を行う。
(もっと読む)
作業車の姿勢制御装置
【課題】 目標傾斜角を所望の傾斜角に調整する操作を煩わしさの少ない状態で容易に行うことが可能となる作業車の姿勢制御装置を提供する。
【解決手段】 走行装置に対する車体の傾斜姿勢を変更させる手動操作式の姿勢変更指令手段100が備えられ、姿勢制御手段400が、姿勢変更制御の実行中において、姿勢変更指令手段にて指令されると、その指令に基づいて走行装置に対する車体の傾斜姿勢を傾斜角変更方向一方側又は他方側へ変更すべく姿勢変更操作手段の作動を制御し、且つ、指令が終了すると、その終了時において傾斜角検出手段23にて検出される車体の水平基準面に対する傾斜角を目標傾斜角として設定し、その後はその設定した目標傾斜角に基づいて前記姿勢変更操作手段100の作動を制御するように構成されている。
(もっと読む)
作業車の姿勢制御装置
【課題】 走行装置に対する車体の姿勢が大きく変化するおそれが少ない場合には車体の姿勢変更速度を遅くして乗り心地が低下することを防止しながらも、走行装置に対する車体の姿勢が大きく変化するような場合には迅速に姿勢変更操作を行うことが可能な作業車の姿勢制御装置を提供する。
【解決手段】 車体における傾斜角変更方向に離れた一端側箇所及び他端側箇所夫々を走行装置の接地部に対して昇降自在な複数の駆動手段を備え、傾斜角検出手段の検出情報に基づいて、車体の水平基準面に対する傾斜角が設定傾斜角に維持されるように駆動手段を制御する姿勢変更制御を実行するように構成され、走行装置に対する車体の姿勢が大きく変化すると予測される姿勢変動タイミングでないことが判別されると片側駆動形式の姿勢変更操作を実行し、且つ、姿勢変動タイミングであることが判別されると両側駆動形式の姿勢変更操作を実行する。
(もっと読む)
作業車の姿勢検出装置及び作業車の姿勢制御装置
【課題】 車体が前後方向に移動するときに加速度が発生する場合であっても、車体の水平基準面に対する傾斜角を適正に検出することが可能となる作業車の姿勢検出装置を提供する。
【解決手段】 車体の前後傾斜角を求める傾斜角算出手段300が、加速度検出手段200にて検出される加速度が設定値より大きいとき及び加速度が設定値よりも大きい状態から小さい状態になったのち検出状態復帰用設定時間が経過するまでの間は、加速度が設定値よりも大きくなったときにおいて求めている車体の前後傾斜角、及び、時間経過に伴って順次検出される角速度センサ25の検出値に基づいて、車体の前後傾斜角を求め、且つ、加速度が設定値より小さく且つ検出状態復帰用設定時間以外のときには、時間経過に伴って順次検出される傾斜角センサ24の検出値及び時間経過に伴って順次検出される角速度センサ25の検出値に基づいて、車体の前後傾斜角を求める。
(もっと読む)
水田作業機の自動昇降制御装置
【課題】 走行機体の後部に昇降自在に連結した水田作業装置にセンサフロートを上下揺動自在に装備し、センサフロートの揺動角度を目標角度に維持するように水田作業装置を昇降制御するよう構成した水田作業機の自動昇降制御装置において、走行機体の前後傾斜を応答性良く的確に検知して、的確な目標角度補正を行い、安定した作業深さをもたらす昇降制御を実行できるようにする。
【解決手段】 走行機体に機体前後方向の角度変化を検知する角速度センサ31を設け、この角速度センサ31の検出情報に基づいてセンサフロートの目標角度θ0を自動補正する制御手段を備えてある。
(もっと読む)
作業車両
【課題】 複数の自動制御機能を備える作業車両において、作業種別毎にオペレータの好みに応じた自動制御機能の入切設定を可能にする。
【解決手段】 制御装置5は、モード切換手段(モード切換スイッチ14)によって、少なくとも走行モードと作業モードとに移行可能に構成されると共に、当該作業モードにおける作業種別を選択する作業切換手段(作業切換スイッチ19)を備え、走行モードでは、路上走行時において必要としない自動制御機能の制御作動を禁止し、作業モードでは、作業切換手段によって選択された作業種別毎に自動制御機能の設定を可能にすると共に、設定された自動制御機能の制御作動を許可する。
(もっと読む)
農作業機械
【課題】 ロータリ耕耘機24付きのトラクタ1において、耕地の硬軟度に左右されることなく、耕耘深さ自動制御を実行できるようにする。
【解決手段】 ロータリ耕耘機24には、その耕耘深さRDを検出するリヤカバーセンサ124を設ける。走行機体2には、ロータリ耕耘機24の目標耕耘深さRD0を予め設定する耕深設定器と、走行機体2の対地高さを検出する超音波センサ130とを設ける。耕耘制御コントローラは、基準車高値VH0と超音波センサ130の検出値SWとから沈下量SKを演算して、該沈下量SKに応じてリヤカバーセンサ124の補正後検出値と補正後目標耕耘深さとを求め、補正後検出値に基づいて、ロータリ耕耘機24の現在の耕耘深さRDが補正後目標耕耘深さとなるように昇降制御油圧シリンダの駆動を制御する。
(もっと読む)
1 - 20 / 32
[ Back to top ]