
Fターム[2B304MA08]の内容
Fターム[2B304MA08]に分類される特許
141 - 149 / 149
コンバインの走行姿勢制御装置
【課題】刈取機を所定高さ位置へ上昇操作して、旋回操作したときには、機体が左右に傾斜すると、左右両側のクローラは昇降制御されることにより、機体が転倒して危険であった。
【解決手段】穀稈を刈取る刈取機8と、穀稈を脱穀する脱穀機9とを設け、所定のスイッチ12の「ON」操作で、刈取機8と、脱穀機9のフィードチェン10との作動を自動停止し、機体1aの左右傾斜と、前後傾斜を検出するローリングセンサ6と、ピッチングセンサ7とを設け、刈取機8が所定高さ位置まで上昇させて停止させると、機体1aをローリング装置4でのローリング制御を停止制御する構成である。
(もっと読む)
移動農機

【課題】 角速度センサによる傾斜制御時の不感帯を適正化し、角速度センサの性能を生かした高精度な傾斜制御を行う。
【解決手段】 作業機3の左右傾斜を、傾斜センサ7及び角速度センサ8の検出値に基づいて自動的に制御するにあたり、角速度センサ8の検出値が変動状態のときは、角速度センサ8の検出値を積算して傾斜データとすると共に、角速度センサ8の検出値が安定状態のときは、傾斜センサ7の検出値を傾斜データとして作業機3の左右傾斜角を判断し、更に、角速度センサ8に基づく傾斜データを用いる場合は、傾斜センサ7の傾斜データを用いる場合よりも狭い不感帯を適用して作業機3の傾斜制御を行う。
(もっと読む)
移動農機
【課題】 角速度センサの積算データを用いて作業機の傾斜制御を行う移動農機において、誤差の蓄積を抑制し、傾斜制御の精度を向上させる。
【解決手段】 作業機3の左右傾斜を、傾斜センサ7及び角速度センサ8の検出値に基づいて自動的に制御するトラクタにおいて、角速度センサ8の検出値が変動状態のときは、角速度センサ8の検出値を積算して傾斜データとすると共に、角速度センサ8の検出値が安定状態のときは、傾斜センサ7の検出値を傾斜データとして作業機3の左右傾斜角を判断し、更に、角速度センサ8の検出値を傾斜データとする状態が所定時間以上継続したとき、角速度センサ8の積算データをクリアする。
(もっと読む)
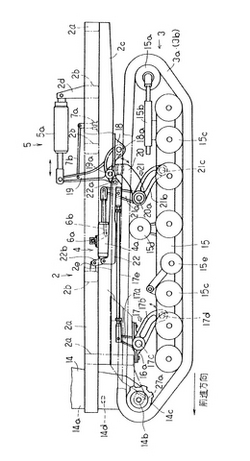
クローラ走行車
【課題】作業を中断させることなくスピンターンスイッチ操作によってスピンターンの禁止及び許可の切換を行い、走行クローラの走行性能を路面条件に適応させて維持させる。
【解決手段】左右走行クローラを同一方向に同一速度で駆動する変速部材と、左右走行クローラの旋回用操向部材を設けるクローラ走行車において、操向ハンドルにスピンターンスイッチを設け、操向ハンドルを握る手で操作可能な範囲にスピンターンスイッチを配置させたことを特徴とする。
(もっと読む)
苗移植機
【課題】整地装置付き苗植付部のローリング精度の向上を図る。
【解決手段】走行車体2に設けた昇降リンク機構13により昇降自在の走行部側ベース14に整地ローリング軸16を介して整地ベース17を左右ローリング自在に設ける。整地ベース17に整地装置22を設けると共に、走行部側ベース14と整地ベース17との間を左右のローリングスプリング43,43で連結して整地ベース17を従動的に左右にローリング制御可能に構成する。整地ベース17には植付ローリング軸18により苗植付部19を左右ローリング自在に設けて、苗植付部19をローリングアクチュエータ21により整地ベース17のローリング制御状態に沿うように左右ローリング制御可能に構成する。
(もっと読む)
作業車輌における傾斜自動制御装置
【課題】 角速度センサの基準値を刻々と補正する際の演算負荷や必要なメモリ容量が小さく済み、しかも、角速度センサ出力の読み込み頻度が少なくても補正の精度が必要十分に確保される作業車輌における傾斜自動制御装置を提供する。
【解決手段】 一定時間ごとに角速度センサの出力データから現在の基準データを差し引いて差分データを求め、新しい基準データ=現在の基準データ+修正量、修正量=差分データ/(2のn乗)という演算を実行して基準データを修正するので、角速度センサの角速度0に対応する基準値が変化すると、新しい基準値に対応するレベルへ向かって基準データが演算ごとに誘導される。差分データが小さい場合は乗数nを段階的に増加させて修正量を減らすが、差分データが大きい場合は乗数nを段階的に減少させて1回あたりの修正量を増やす。
(もっと読む)
作業車輌における傾斜自動制御装置
【課題】 作業部を上昇させて走行機体を転回させた後、作業部を下降させて作業再開した際に、安定した傾斜角度調整を開始させて、安定した姿勢の作業部によって正確で仕上りのきれいな作業面が得られる作業車輌における傾斜自動制御装置を提供する。
【解決手段】 ステップ111で作業部が上昇状態であると判断されると傾斜センサと角速度センサの出力に基づく傾斜制御を休止させる。その後、作業部が上昇状態でないことが確認され、ステップ112で作業部下降後設定時間TAが経過したことが確認され、ステップ113、114で傾斜センサと角速度センサが出力安定状態であることが確認された場合に初めて傾斜センサと角速度センサの出力に基づく傾斜制御を開始させる。
(もっと読む)
薬剤散布作業車
【課題】十字レバーなどのレバー66L,Rを用いながら車体の左右にある散布ブーム44,44の操作を同時に行うことができ、また伸縮動作をする場合でも片手で楽に散布ブーム44,44を操作できる操作性、作業性が向上した薬液散布作業車を提供すること。
【解決手段】薬液散布用の車体左右の散布ブーム44,44をそれぞれ上下方向に動かすためにレバー66L,66Rを上下方向に操作し、左右のブーム44,44をそれぞれ左右方向に伸縮操作するためにレバー66L,Rをそれぞれ左右方向に操作させる第一モードと左右の散布ブーム44,44の両方を同時に作動させる第二モードを切替ボタン65で切替可能に構成した薬剤散布作業車である。
(もっと読む)
トラクタの作業機ローリング制御装置
【課題】 トラクタでプラウ作業を行う際、局所的に軟弱な個所があると、負荷が変化し、同作業機の傾きが頻繁に変更されて、作業機の左右傾きを再設定する必要が生じる。また前記軟弱な場所を通過した後には、元の傾き値に再設定する必要が生じ、操作が煩わしいものであった。
【解決手段】トラクタには、作業機の左右ローリング姿勢を記憶する記憶装置と、作業機の昇降位置を検出するリフトアーム角センサを設ける。対本機ローリング制御を実行中、手動設定器S8,S9によって作業機が作業位置で左右傾きが変更された場合は、この変更後の左右ローリング位置を新たな保持位置として前記対本機ローリング制御モードを作動する。その後、同作業機が非作業位置へ上昇した後には、前記変更前の記憶装置の値に基づいて対本機ローリング制御を作動させる。
(もっと読む)
141 - 149 / 149
[ Back to top ]