
Fターム[2B304MA08]の内容
Fターム[2B304MA08]に分類される特許
41 - 60 / 149
乗用型農作業機
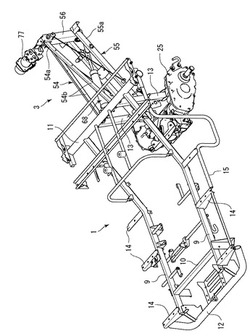
【課題】走行機体の後部に苗植装置がリンク装置にて昇降可能に連結されている田植機において、リンク装置をシンプルながら強度的に優れた形態とする。
【解決手段】リンク装置3はトップリンク54とロアリンク55とを有している。両リンク54,55の前端部はリア支柱13に連結されて、両リンク54,55の後端部はヒッチ56に連結されている。苗植装置はヒッチ56に連結されている。トップリンク54は幹部54aと二股部54bとを有する平面視Y型の形態を成しており、幹部54aが後ろに向いて二股部54bが前に向いている。トップリンク54の後端はヒッチ56の内部に入り込んでいる。ロアリンク55は梯子型の形態になっている。リンク装置は全体としてシンプルでしかも強度的に優れている。
(もっと読む)
作業機系油圧構造

【課題】単一油圧源から油圧昇降機構及び油圧傾斜機構に作動油を供給する作業機系油圧構造の小型化を図る。
【解決手段】単一油圧源からの作動油を油圧昇降機構及び油圧傾斜機構に分配する分流弁がシリンダヘッドに内装される。好ましくは、シリンダヘッドは電磁リフトバルブユニットとは反対側に延在部を有する。分流弁及びパイロットチェック弁が延在部に内装され、傾斜用電磁弁が延在部の上面に装着される。パイロットチェック弁が介挿された状態で傾斜用電磁弁及び油圧傾斜機構の間を接続する傾斜用伸長ライン及び圧縮ラインは、傾斜用電磁弁及びパイロットチェック弁を接続する延在部に形成された傾斜用上流側伸長油路及び圧縮油路と、上流側端部がパイロットチェック弁に接続され且つ下流側端部が延在部の車輌幅方向第2側の側面に開口して傾斜用伸長ポート及び傾斜用圧縮ポートを形成する延在部に形成された傾斜用下流側伸長油路及び圧縮油路とを有する。
(もっと読む)
作業車両の制御装置
【課題】安価で、しかも作業機のローリング制御をタイミング良く行うことができるトラクタなどの作業車両を提供すること。
【解決手段】走行車両1に連結する作業機3が、走行車両1の旋回時に作業機3を上昇させないで圃場上に降ろしたまま旋回して作業する圃場の代かき作業機3である場合、このような作業時には、走行車両1は圃場の水平面上を比較的高速で走行しながら旋回するため遠心力が作業機3に作用し、スロープセンサ10はその遠心力によって、該センサ10中の粘性液が傾き、機体が傾斜したと判定してしまい、水平シリンダ16を伸縮し、作業機3が水平からずれてしまうことがある。そこで、ハンドル切れ角により旋回径を算出し、その旋回径と車速によりスロープセンサ10に働く遠心力によるスロープセンサ値の変化を補正値としてスロープセンサ検出値に加減算することで、実際の走行車両1の傾斜を判断でき、作業機3が水平となる。
(もっと読む)
作業車
【課題】傾斜地圃場で等高線に沿って作業を行う場合の作業機の谷側への沈み込みの是正を容易に行えるようにする。
【解決手段】作業機37の左右方向の傾斜角度θを検出するセンサーの検出値と傾斜設定器によって設定した設定値θ1に基づいて、作業機37を自動的にローリング制御するローリング制御手段を備える。設定値θ1を補正する傾斜地ローリング補正手段と、傾斜地ローリング補正手段で補正した補正値θ2に対して、この補正値θ2を更に補正する手動ローリング補正手段を設け、手動ローリング補正手段によって補正した補正値θ2を表示する補正値表示部を備える。
(もっと読む)
トラクタの耕深自動制御装置
【課題】既耕地と未耕地との間に生じた凹部に片側の車輪が落ち込み機体が傾斜した場合に、耕深が一時的に深くなり耕耘跡に盛土が形成される不都合を解消する。
【解決手段】トラクタの制御装置8は、走行機体1に連結した耕耘装置3を、その深さセンサ15の検出値が深さ設定器17によって設定される耕深目標値となるように所定の不感帯をもって昇降制御する耕深自動制御と、走行機体1の傾斜に伴って耕耘装置3が左右に傾いたとき、耕耘装置3が所定の左右傾斜角に保たれるように耕耘装置3を傾斜制御する傾斜自動制御とを行うにあたり、走行機体1の傾斜に伴って耕耘装置3が左右に傾いて傾斜自動制御が行われる際には、走行機体1の傾斜が発生する前の深さセンサ15の検出値を耕深目標値として耕深自動制御を行う。
(もっと読む)
多目的農作業機
【課題】直播装置82と苗植付部4などトラクタ本体に装着可能な装置側に高価なセンサを設置することなくローリング制御ができる多目的農作業機を提供すること。
【解決手段】 走行車体2の後部に複数条分の種子を圃場に播くための直播装置82又は複数条分の苗を圃場に植え付けるための苗植付部4を車体2に対して昇降自在に且つ着脱自在に設け、車体2の後部に圃場面を整地するロータ27,27をロータ昇降リンク66を介して設け、該ロータ昇降リンク66に水平センサ81aを取り付けたので、作業装置を取り替えても前記左右傾斜センサ81aを利用することができる。
(もっと読む)
作業車
【課題】複数の制御手段を備えた作業車において、各種の作業に対応するように制御手段を選択する場合、制御手段の選択が容易に行えるように構成する。
【解決手段】複数の制御手段と、制御手段の状態を人為的に変更可能な設定操作具とを備える。複数の制御モードM1,M2を備え、制御モードM1,M2の各々において制御手段の状態を記憶可能に構成し、制御モードM1,M2に記憶された状態を設定操作具により変更可能に構成する。複数の制御モードM1,M2のうちの一つを人為的に選択する選択手段67を備え、選択手段67により選択された制御モードM1,M2の状態に基づいて制御手段が作動するように構成する。
(もっと読む)
農作業機
【課題】本発明では、農作業機の走行機体に対地作業機をローリング制御可能に装着した構成で、エンジンの回転速度の変化にかかわらず、ローリング制御が精度良く作動するようにすることを課題とする。
【解決手段】農作業機の走行機体1に対地作業機13を水平シリンダ19の駆動でローリング可能に装着し、走行機体1或は対地作業機13に設けた傾斜センサ23の検出信号とエンジン2の回転を検出するエンジン回転センサ27の検出回転数をコントローラ30に入力し、該コントローラ30から出力する水平シリンダ19の駆動出力デュティー比をエンジン回転数の低下で増加させて水平シリンダ19の動作速度がエンジン2の実用回転域で略一定になるようにした構成したことを特徴とする農作業機の構成とする。
(もっと読む)
作業車両
【課題】各種の自動制御装置の制御感度を調整できる作業車両を提供することである。
【解決手段】作業機Rの昇降制御、変速装置Gの駆動制御、作業機Rの水平制御を含む作業条件と作業の種類に応じて制御機能部の制御感度の調整量を増加または減少させるための感度調整スイッチ(増減スイッチ191a,191b)191と調整対象の制御機能部の接続スイッチ192〜195と前記制御機能部の制御感度調整量をモニタする表示部Hを単一の調整操作・表示部180の自動制御調整部202に配置して、さまざまな作業を行う場合、作業条件・作業の種類または作業機の種類はさまざまあり、また微妙な調整をして作業にマッチさせる操作を単一の操作・表示部180で微妙に調整しながら行うことができる。
(もっと読む)
苗移植機
【課題】本発明では、圃場を滑走するフローとの前側に整地ロータを配設した苗移植機で、苗植付部の左右ローリングと対地高さの制御感度の調整時の制御方法に工夫を凝らすことで苗植付部の苗植え付け深さが均等になるようにすることが課題である。
【解決手段】走行車体の後部に整地ロータとフロートを備えた苗植付部を設け、水平センサが検出する苗植付部の左右の傾きとフロート迎い角センサの検出する圃場面の前後傾きでローリングモータと昇降用油圧電磁バルブを制御して苗植付部のローリングと昇降を制御する苗移植機において、各センサの検出信号に対する制御動作の感度を調整する感度調節手段を設け、該感度調節手段を鈍感に調整した場合に整地ロータの高さ調整量を標準よりも低く制御した。
(もっと読む)
農作業機
【課題】本発明では、農作業機に対地作業機を装着した構成で、機体の左右傾きが細かい周期で繰り返されるような農作業中にも、対地作業機の姿勢が乱れることが無いようにすることを課題とする。
【解決手段】農作業機に対地作業機をローリング可能に装着し、農作業機の走行機体に設けた傾斜センサと角速度センサの検出信号で対地作業機をローリング制御するにあたり、前記角速度センサが所定値以上の角速度を検出すると角速度センサの検出値に基づいてローリング制御を行なうと共に、角速度センサの検出信号を無視してローリング制御を行うように切り換える制御選択スイッチを設け、必要に応じて制御選択スイッチの切り換え操作を行って傾斜センサのみの検出信号でローリング制御すべく構成したことを特徴とする農作業機の構成とする。
(もっと読む)
作業車の作業条件表示構造
【課題】 作業に適した所定の作業形態を確実に容易かつ迅速に得られるようにして、その所定の作業形態による仕上がり精度の高い作業を確実に効率良く行えるようにする。
【解決手段】 所定の作業形態を得るのに必要な条件を設定する設定手段137、記憶指令手段138の指令に基づいて条件を記憶する記憶手段47F、および、表示指令手段139の指令に基づいて記憶手段47Fに記憶した条件を表示する条件表示手段136を備えてある。
(もっと読む)
田植機
【課題】機体の左右バランスが良好とさせて安定した植付作業が行える田植機を提供する。
【解決手段】植付部15の左右傾きを調節するローリング制御装置99と、苗載台16の苗送り軸を駆動する苗送りケース59とを備え、ローリング制御装置99によって植付部15がローリング支点軸97回りに回動して左右傾動するように構成した構造であって、ローリング支点軸97を中心に、植付部15の一側にローリング制御装置99を、植付部15の他側に前記苗送りケース59を振分け配置させた。
(もっと読む)
田植機
【課題】 走行機体の後部に苗植付け装置を昇降可能に連結するとともに、苗植付け装置における植付け部位の前方に整地装置を配備してある田植機において、深植え傾向になることを回避するとともに、苗植付け装置を前後に短いものにして機体方向転換などを容易に行えるようにする。
【解決手段】 苗植付け装置5を、整地フロートを備えないものに構成するとともに、整地装置16の前方に苗植付け装置5の田面に対する高さを検知する高さ検出機構26を配備し、高さ検出機構26の検出情報に基づいて苗植付け装置5を昇降制御する制御手段を備えてある。
(もっと読む)
コンバインの姿勢制御装置
【課題】機体の左右姿勢を制御する姿勢制御装置を備えたコンバインにおいて、姿勢制御装置の目標傾斜角を設定する設定器であるダイヤルを他部品の兼用化により廃止してコストの低減を図る。
【解決手段】機体の左右姿勢が設定傾斜となるようにクローラ走行装置16L,16Rを昇降制御する自動傾斜制御と、該自動傾斜制御に優先して手動操作具65によりクローラ走行装置16L,16Rを昇降制御する手動傾斜制御とを可能にする制御手段41,61とを備え、前記自動傾斜制御での作業走行中に手動操作具65の操作を行った時は、その操作を終了した時点における機体の左右姿勢を設定傾斜とする傾斜設定モードとして自動傾斜制御に復帰せしめると共に、前記傾斜設定モードでの作業走行中に自動傾斜制御の起動手段62を操作すると、傾斜設定モードから機体の水平姿勢を設定傾斜とする水平設定モードへ自動的に切換えて自動傾斜制御を継続するように構成した。
(もっと読む)
田植機
【課題】苗載台の裏側にローリング制御装置をコンパクトに設置でき、走行車に植付部を近接させて配置でき、機体を小型且つ軽量化できる田植機を提供する。
【解決手段】エンジン2を搭載した走行車1と、苗載台16及び苗植付爪17を備える植付部15と、前記走行車1にリンク機構27を介して前記植付部15を連結させるヒッチ部材24と、前記植付部15の左右傾きを調節するローリング制御装置151とを備えた田植機において、前記苗載台16の底面のうち縦送りベルト123よりも高位置の底面に略平行になる方向に傾斜させた姿勢で、前記ヒッチ部材24の上端側に前記ローリング制御装置151を支持するように構成した。
(もっと読む)
植付作業機
【課題】植付作業機の配置構成を改善する。
【解決手段】走行機体1に連結して使用される植付作業機3において、入力ケース8は、作業機フレーム4の上方後方を迂回して動力分配軸9に動力を伝動すると共に、入力軸13を軸支する入力部8aと、出力軸14を軸支する出力部8bとを有し、該出力部8bに対して入力部8aをローリング軸12側に偏倚させて、入力部8aの下方で出力軸14を動力分配軸9に連結し、さらに、入力ケース8の入力軸13とローリング軸12を側面視で重合させる。
(もっと読む)
作業機
【課題】後進時において機体の地面への接触を防止しつつ、姿勢の水平制御が可能な作業機を提供する。
【解決手段】コンバイン(作業機)は、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対する機体の支持高さを昇降させるために当該機体の左右に配置される機体昇降シリンダと、を備える。また、コンバインは、機体の左右傾斜角を検出する傾斜角センサと、機体の前後進操作が可能な主変速レバーと、傾斜角センサの検出値に応じて機体昇降シリンダを制御することで機体を水平制御することが可能な制御部と、を備える。制御部は、操作部の後進操作が検出され(S103)、更に後進速度が所定速度以上であると(S104)、一側の前記機体昇降シリンダを伸長させて機体が最上端になる位置で維持するとともに、他側の前記機体昇降シリンダを伸縮させることで機体を水平に制御する(S106〜S109)。
(もっと読む)
作業車輌
【課題】各種昇降制御及び駆動制御が停止された走行モードにあっても、駆動制御の一部を変更し得る変更手段を備えた作業車輌を提供する。
【解決手段】トラクタ1は、作業機10の各種昇降制御及び走行機体5の各種駆動制御をそれぞれ各別に変更設定する設定手段(スイッチ)と、該設定手段により設定された状態で一括作動する作業モードとこれら各種昇降制御及び駆動制御を停止する走行モードとに切換えるおまかせスイッチとを備える。制御モードが走行モードに選択された状態であっても、四駆切換えスイッチによって、二輪駆動から四輪駆動に切換えることができるように構成する。これにより、走行状況に応じた適正な制御に変更できる。
(もっと読む)
作業機
【課題】 作業場所の状況に応じて効率的に機体の昇降制御を行う作業機を提供する。
【解決手段】コンバイン(作業機)は、刈取部(作業部)と、この刈取部を昇降させるための刈取部昇降シリンダと、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対して機体を昇降させるために当該機体の左右に配置される機体昇降シリンダと、刈取部の昇降操作及び前記機体の前後進操作が可能な操作部と、を備える。また、コンバインは、操作部の操作に応じて刈取部昇降シリンダ、クローラ走行部及び機体昇降シリンダを制御する制御部を備える。制御部の制御モードは、切換スイッチにより、第1制御モードと第2制御モードとの間で切換可能である。制御部は、刈取部の上昇操作及び機体の後進操作の両方が検出された場合は、第1制御モードでは機体上昇制御及び機体の後進制御を行い、第2制御モードでは機体を上昇させずに後進制御を行う。
(もっと読む)
41 - 60 / 149
[ Back to top ]