
Fターム[2B382HF02]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 前処理部、刈取装置の移動又は位置調節機構 (350) | 移動又は調節機構 (165) | 上下昇降又は調節機構 (148)
Fターム[2B382HF02]の下位に属するFターム
車高調節又は車体持上げ機構 (8)
Fターム[2B382HF02]に分類される特許
61 - 80 / 140
刈取収穫機の刈取昇降制御装置
【課題】作業者の熟練度や作業状況の違い等に応じて適切な制御状態で昇降操作手段の作動を制御することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】刈取部を昇降する昇降操作手段の作動を制御する制御手段Hが、自動制御処理を実行する制御モードとして、刈取部を上昇させる上昇処理及び刈取部を下降させる下降処理の夫々を実行する形態で昇降操作手段C1の作動を制御する自動昇降制御モードと、前記上昇処理及び前記下降処理のうちの前記上昇処理のみを実行する形態で昇降操作手段C1の作動を制御する自動上昇制御モードとを備えるように構成され、且つ、手動操作式のモード切換指令手段の切り換え指令に基づいて、前記自動昇降制御モードにて前記自動制御処理を実行する状態と、前記自動上昇制御モードにて前記自動制御処理を実行する状態とに切り換え自在に構成されている。
(もっと読む)
コンバインによる収穫方法とこの収穫方法に使用するコンバイン

【課題】刈取り前処理部の圃場への突っ込みや沈み込みを防止しながら収穫作業できるコンバインによる収穫方法を提供する。
【解決手段】刈取り前処理部10に作用する下降ストッパー手段8を効かせ、刈取り前処理部10を地面から設定刈り高さに浮上した連結高さに支持させながら、かつ、刈取り前処理部10が接地反力によって上昇操作されることを許容しながら収穫走行する。
(もっと読む)
コンバインの刈取り部昇降構造
【課題】刈高さ自動制御装置を備えることなく比較的安定した刈高さでの収穫作業を行うことのできるコンバインの刈取り部昇降構造を提供する。
【解決手段】引起し装置7、刈取り装置8、刈取り穀稈搬送装置11を備えた刈取り部3を、走行機体2の前部に昇降可能に連結したコンバインの刈取り部昇降構造において、刈取り部3の下部における左右両端と中間とに、刈取り部3を圃場面に受け止め支持させるための接地体25を装備する。
(もっと読む)
コンバイン
【課題】副切断装置の刈高さ制御を、主切断装置とは別個にも、連動しても行えるようにするにあたり、各種センサー類などを削減して、構造の簡素化、及び低コスト化を図る。
【解決手段】主切断装置32を走行機体に対して昇降操作自在に構成し、副切断装置41を走行機体側に揺動自在に装備させた昇降フレーム40に支持させて昇降自在に構成し、主切断装置32の昇降操作に連動して副切断装置41が昇降される連係状態と、主切断装置32の昇降操作とは別に独立して副切断装置41が昇降自在である連係解除状態とに、主切断装置32に対する副切断装置41の昇降作動の連係状態を切換操作自在な連係手段5を備えた。
(もっと読む)
コンバインの刈取り部昇降構造
【課題】刈取り部の重量負荷を支持するバランス構造を小型化できるようにし、刈取り部の移動開放を容易に行うことができるようにする。
【解決手段】主フレーム16の前端部の横フレームに機体側取付部を備えて、この機体側取付部の前端部に形成された前方下方に傾斜した傾斜面に、弾性バランス機構61を所定の前向き突出姿勢で着脱自在に取り付ける。刈取り部フレーム17を受け止め支持する横長の横杆部35aを備えて、横長の横杆部35aを弾性バランス機構61の前端部に設けられた受止め部で分離可能に接当支持する。
(もっと読む)
コンバインの制御装置
【課題】走行車体が左右に傾いても刈取装置が刈る穀稈の位置が左右で均等になるようにして、刈取脱穀作業の円滑化と圃場の刈跡の美観向上を図る。
【解決手段】刈取装置(30)前端の左右の分草杆(1a,1d)に対地高さを検出する左右の非接触式の対地距離センサ(2a,2d)を夫々設け、刈取走行中に左右両方の対地距離センサ(2a,2d)が制御下限高さ以下を検出すると刈取装置(30)を上昇制御し、左右の対地距離センサ(2a,2d)の片側のみが制御下限高さ以下を検出すると左右両方の対地距離センサ(2a,2d)が制御下限高さ以上を検出するように走行車体をローリング制御する構成とした。
(もっと読む)
刈取収穫機の刈取部昇降構造
【課題】刈取収穫機の刈取部昇降構造において、例えば畦際での旋回が終了して刈取部を圃場面に下降させて次の刈取行程に入る場合、刈取部の先端部分が圃場面の凸部に突っ込むような状態を少なくする。
【解決手段】刈取部4を昇降駆動する昇降機構と、人為的に操作される昇降操作具とを備える。上方に設定された上昇限度UU1及び下方に設定された下降限度DD1の範囲において、昇降操作具の操作により昇降機構を上昇側及び下降側に作動操作、昇降操作具の操作により昇降機構を停止操作する制御手段を備える。制御手段の下降限度DD1を高低に変更する変更手段を備える。
(もっと読む)
コンバインの刈取部昇降用油圧回路
【課題】 刈取部の昇降速度を変速可能な油圧回路であって、低速上昇時の上昇速度において刈取部にかかる負荷によって生じる変動を抑制することができ、エンジンの低速回転時にも刈取部の低速上昇が可能であり、しかも、低速昇降に関してコンバイン本機へのマッチングが容易な、油圧回路を提供する。
【解決手段】 コンバインの刈取部を昇降させる油圧シリンダー2を、オイルタンク3から油圧ポンプ4を介して送られる圧力油によって駆動するための油圧回路であって、油圧ポンプ4から油圧シリンダー2に圧力油を供給するための供給油路と、供給油路に接続され、流路断面積の異なるドレン流量制限用絞りを通る複数の油路を切り換え選択可能なドレン油路と、供給油路に接続され、該供給油路の油圧を所定圧力に制御するための圧力制御弁16と、を有し、前記供給油路は、開閉可能な切換弁7と、切換弁7と並列に接続された供給油量制限用絞り9とを有する。
(もっと読む)
コンバインの刈取装置昇降油圧制御装置
【課題】本発明では、昇降操作レバー等の手元操作で刈取装置の下降速度を任意に変更出来るようにすると共に、昇降操作レバー等の操作に応じて直ちに下降速度を変化させる応答性を良好にすることを課題とする。
【解決手段】油圧ポンプ12から刈取装置1を昇降する刈取昇降シリンダ37へオイルを供給する刈取油路70に刈取電磁切換弁36を設けると共に該刈取電磁切換弁36の戻り側に下げ速度調整用の電磁可変絞り弁35を設け、この電磁可変絞り弁35を刈取電磁切換弁36のオフ時に最大開放状態に保持すべく制御する構成とした。
(もっと読む)
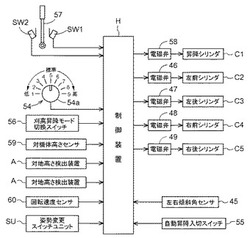
コンバイン
【課題】従来のコンバインは、自動的に刈取部が地面に追従して接地可能となっていると、刈取作業を行っていない場合においてまでも、刈取部が意図せず下降する、という問題があった。
【解決手段】刈取部6が地面に接地しているか否かを検知する接地検知センサ57と、刈取部6を昇降操作する上昇・下降操作スイッチ51・52と、を備え、制御部60は、刈取作業時に、接地検知センサ57によって刈取部6が地面に接地していないことを検知すると、刈取部6が下降する自動制御モードと、刈取作業時に、上昇・下降操作スイッチ51・52の昇降操作によって刈取部6が昇降する手動制御モードと、を切替可能に備え、自動制御モードである場合に、コンバインのエンジン10から刈取部6への動力を断接する刈取クラッチ37が切状態になると、手動制御モードに切り替わる。
(もっと読む)
コンバインの刈取前処理構造
【課題】 副切断装置の取付形態に工夫を加えることによって、正副切断装置による刈取作業の良さを維持しながら、刈残し株の株高さを揃えることのできるコンバインの刈取前処理構造を提供する。
【解決手段】 植立穀稈を刈り取る主切断装置9より低い位置で植立穀稈に作用する副切断装置14を設ける。副切断装置14を昇降フレーム13により昇降自在に支持する。副切断装置14と主切断装置13とを、刈り高さ調節しながら作業走行する場合には、副切断装置14を主切断装置9の昇降作動に連動させない状態に維持し、畦際旋回時には、副切断装置14を主切断装置9の上昇作動に連動させるべく構成してある。
(もっと読む)
コンバイン
【課題】橇体によって接地支持した刈取装置5が、圃場面の凹凸に滑らかに追従して昇降するものとし、圃場面へ突っ込む不具合を解消して、刈取作業を円滑に行なえるものとする。
【解決手段】刈取装置(5)を支持する支持フレーム(9)の後端部を走行車台(2)の前部に昇降回動自在に装着し、該走行車台(2)側と支持フレーム(9)側との間に、刈取装置(5)の自重よりも大きい推力で該刈取装置(5)を強制的に昇降させる刈取上下シリンダ(10)と、刈取装置(5)の自重と同等の推力または刈取装置(5)の自重よりも小さい推力で該刈取装置(5)を上昇側に付勢する刈取支持シリンダ(11)とを設け、刈取装置(5)の下部に該刈取装置(5)を接地支持する橇体(12)を設ける。
(もっと読む)
コンバイン
【課題】刈取り作業中に前処理部を所定の高さまで上昇させた時、前処理部の駆動を自動的に停止させる前処理部駆動停止制御を備えたコンバインにおいて、前記前処理部駆動停止制御を実行可能状態または実行不能状態に切替えることができる切替え操作手段の操作性を向上させる。
【解決手段】コンバインの操縦部4に備える主変速レバー19の前方近傍に、前処理部駆動停止制御を実行可能状態または実行不能状態に切替える切替え操作手段62を配設すると共に、該切替え操作手段62としてダイヤル付スイッチを採用し、このダイヤル63を介して前処理部6の下降限高さを設定できるように構成した。
(もっと読む)
コンバイン
【課題】圃場内での枕土、1行程刈取終了等での回行作業時の操作性を向上させる。
【解決手段】刈取前処理装置における駆動速度の切換え動作は、1行程の終わりでオートリフトスイッチがオンされたと判断されると(S1:yes )、次いで、車速センサの検出値により、走行機体の車速SVが設定低速度SLVより低い場合(S2:yes )には刈取前処理装置の駆動速度KVxが低速一定速度LTVとなる「刈取クイック低」回転制御が実行される(S3)。また、走行機体の車速SVが設定高速度SHVより高い場合(S4:yes )には、刈取前処理装置の駆動速度KVxが高速一定速度HTVとなる「刈取クイック高」回転制御が実行される(S5)。走行機体の車速SVが設定低速度SLVから設定高速度SHVまでの間の値である場合(S6:yes )には、刈取前処理装置の駆動速度KVxが車速同調速度DVになる(S7)。
(もっと読む)
コンバイン
【課題】刈取装置を滑らかに地面追従させると共に、上昇状態の刈取装置の姿勢を安定させて、刈取作業の能率を高める。
【解決手段】車台(1)の前部に刈取支持台(38)を設け、刈取装置(4)を支持する支持フレーム(12)の後端部を刈取支持台(38)に上下回動自在に取り付ける。そして、車台(1)側と支持フレーム(12)との間に、刈取装置(4)の自重よりも大きな推力によって該刈取装置(4)を強制的に上下動させる刈取上下シリンダ(39)と、刈取装置(4)の自重と略同等の推力によって該刈取装置(4)を弾性的に支持する刈取支持シリンダ(42)とを設ける。また、刈取装置(4)の下部に該刈取装置(4)の自重を接地支持する橇体(17)を設ける。更に、橇体(17)を刈取装置(4)に対して昇降調節する高さ調節装置(70)を設ける。
(もっと読む)
コンバイン
【課題】第1及び第2スイッチの誤操作を防止しながら、第1及び第2スイッチの操作性を向上させることができ、操向レバーの操作性を向上させることができるコンバインを実現する。
【解決手段】コンバインにおいて、運転部Xの前部に機体操向用の操向レバー70を備えて、互いに相反する操作をする第1及び第2スイッチ74,75を、操向レバー70における操作部72の異なる面に配設する。
(もっと読む)
刈取収穫機
【課題】 走行機体の水平基準面に対する前後傾斜角を設定傾斜角に維持しながら刈取作業を行うことが可能なものでありながら、刈取部が地面に突っ込むおそれを少なくすることが可能な刈取収穫機を提供する。
【解決手段】 刈取部10の対地高さが制御目標高さになるように刈取シリンダC1の作動を制御する刈取昇降制御並びに走行機体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段が、刈取部10が地面に近付く形態で走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させているときは、目標対地高さ設定手段にて設定される目標対地高さに対応させて定めた基準対地高さよりも前傾斜操作用設定量だけ高い値を制御目標高さとして定め、走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させていないときは基準対地高さを制御目標高さとして定める。
(もっと読む)
乗用型作業機
【課題】 走行機体に作業装置を駆動昇降可能に連結した乗用型作業機において、的確な機体操縦を行いながら作業装置の昇降を軽快かつ速やかに行えるようにする。
【解決手段】 作業装置を昇降する駆動機構4を、運転座席近傍のステップに配備した昇降ペダル21によって切換え作動させるよう構成してある。
(もっと読む)
作業車の操作制御装置
【課題】 エンジンの始動状態から作業を行うときの操作の簡略化を図ることができる作業車の操作制御装置を提供する。
【解決手段】 操作制御手段Cが、作業指令手段25にて作業開始指令が指令されると、アクセル手段63を前記定格回転状態に操作し且つ作業クラッチ14を前記入り状態に操作するように構成されている作業車の操作制御装置。
(もっと読む)
手持刈込機及び手持刈込機用保護部材
【課題】庭木や芝などの草木を刈り込んだときに出される刈り込まれた草木を、特別な装置や余計な作業を要さずに捕集することができ、しかも草木を刈り込むときの安全性を高めることができる手持刈込機を提供する。また、特に芝刈りにより出されるサッチを捕集しながら刈り込むことができ、効率的な芝刈り作業とともに芝の良好な成長を維持し、かつ不用意に手持刈込機の電源コード等を切断してしまうようなことを抑制・防止しうる、安全性の高い手持刈込機を提供する。
【手段】刈込機本体2と刈込手段4と板状の保護部材1とを有する手持刈込機10であって、前記刈込手段4が前記刈込機本体2の前方にあり、前記板状保護部材1が前記刈込手段4の更に前方であり、かつ、上方にあたる位置にある手持刈込機10。
(もっと読む)
61 - 80 / 140
[ Back to top ]