
Fターム[2C150DK08]の内容
Fターム[2C150DK08]に分類される特許
1 - 20 / 28
操縦用通信装置、被操縦体用通信装置及び操縦用通信システム

【課題】被操縦体に複数搭載された被操縦体用通信装置から個別にテレメトリデータを取得すること。
【解決手段】ペアリング設定時に被操縦体に搭載された複数の被操縦体用通信装置20に対して個々に割り当てた任意の機器判別用ナンバーとペアリング対象の機器IDとを対応付けし、テレメトリデータの送信要求を行う際に、送信要求情報と送信要求先の機器判別用ナンバーとを付加した操縦信号を送信する。被操縦体用通信装置20は、入力した制御信号の信号種別を判定し送信要求情報と自身の機器判別用ナンバーが付加された操縦信号を入力したときに、応答信号としてテレメトリデータを付加したテレメトリデータ信号を送信する。
(もっと読む)
モータ制御回路及び該回路を実装したサーボ装置

【課題】モータ駆動制御用の駆動周波数を任意に変更して所望の操作感覚でサーボ装置を操縦すること。
【解決手段】受信機20を介して送信機10から制御信号として周波数設定信号を受信すると、予め記憶した駆動周波数設定情報のうち、受信した周波数設定信号に応じた情報を選択する。また、送信機10から制御信号である操縦信号を入力すると、選択された駆動周波数設定情報に基づき、パルス幅比較部34bから差分データタイミング信号に同期して取り込んだ差分データ信号を、選択された駆動周波数に対応するように周波数変換処理する。そして、得られた差分データ変換信号を周波数処理情報に基づき所定のカウント範囲まで使用して駆動信号を生成し、駆動機構32の駆動制御を行う。
(もっと読む)
サーボ装置及び該装置を備えた遠隔操作装置
【課題】サーボ装置の応答特性の設定を送信機から容易に行うこと。
【解決手段】送信機10からの制御信号を受信し、この制御信号を予め記憶部35に記憶された特性データに応じて、モータ制御部34で駆動信号に変換して駆動機構32を駆動制御する制御部31を備えたサーボ装置30において、制御部31は、制御信号が操縦信号か特性データ信号かを判別する信号処理部33と、制御信号が特性データ信号であると判断したときは、受信した特性データ信号に基づき特性データが更新記憶される記憶部35とを備えた。
(もっと読む)
ゼンマイ動力式無線操縦玩具
【技術課題】 乾電池等の電源なしで使用できるゼンマイを動力源とする無線操縦玩具を提供する。
【解決手段】 手動巻きにより蓄勢されるゼンマイ2が搭載されていて、このゼンマイ2が解放されるときの蓄力により発電機5を回転させて発電し、かつこの電力を充電した充電式電池6からの出力により前後進切替サーボ12及びステアリングサーボ13を駆動して自動車100を走行させる。また、無線操縦用受信機8の電源も前記充電式電池6を電源とする。
(もっと読む)
ラジコン・ユニット構成パラメータ設定の自動的決定
【課題】出力信号を決定する方法を提供する。
【解決手段】第2の無線装置に関連する無線装置識別子が第1の無線装置内に格納される。第2の無線装置に関連する1つ以上の構成パラメータ設定が第1の無線装置内に格納される。第1の無線装置は無線装置識別子に基づいて第2の無線装置を識別する。第2の無線装置の識別に応答して、第1の無線装置はユーザ入力に基づいて出力信号を決定するのに使用すべき構成パラメータ設定を自動的に決定する。第1の無線装置は第2の無線装置との無線通信リンクを確立する。第1の無線装置はユーザ入力を受信する。構成パラメータ設定およびユーザ入力に基づいて、第1の無線装置は出力信号を決定する。第1の無線装置は無線通信リンクを介して第2の無線装置へ出力信号を送信する。
(もっと読む)
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置が提供される。上記リンケージ装置は、サーボステアリングエンジン動作システム、テールモーター動作システム、及び受信機制御装置(4)を備えている。上記サーボステアリングエンジン動作システムは、前後動サーボステアリングエンジン動作ユニット、及び左右動サーボステアリングエンジン動作ユニットを備えている。上記受信機制御装置(4)は、上記サーボステアリングエンジン動作システム及び上記テールモーター動作システムに同時接続され、上記前後動サーボステアリングエンジン動作ユニット及び上記テールモーター動作システムが同時に協働して作動するように制御可能になっている。従来の3チャンネルまたは4チャンネル模型ヘリコプターと比較して、本発明を適用した、同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターは、風抵抗の性能が優れており、屋外の風に対し速く飛行可能という要件を満たす。 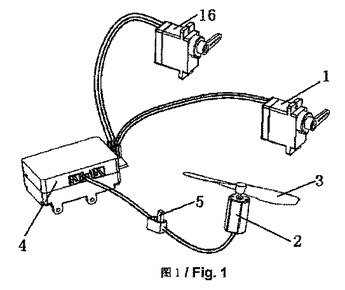 (もっと読む)
(もっと読む)
尾輪式ラジコン飛行機の直進滑走装置
【課題】尾輪式ラジコン飛行機の直進滑走性を向上さすための装置を提供する。
【解決手段】ラダーサーボ(25)に取り付けたサーボホーン(26)の右端と左端にロッドアジャスター(13)を連結する。前記ロッドアジャスターに一体型の作動ロッド(21)と連結作動管(20)を連結し、下部ギア断続ロッド(15)等の各構成部品を介して同軸ギア(9)までを連動(連結)させ、前記同軸ギアと主輪ギア(8)を断続させるものである。前記同軸ギア(9)と主輪ギア(8)が、送信機のラダーステックをコントロールしないか、コントロールをすることによって断続し、左右の主輪(2)が同一回転するか、独自に回転する装置である。同軸ギア(9)と主輪ギア(8)とが連結(圧着)すれば、本機が直進滑走し、前記両ギアを離せば、地上走行時に本機の左右方向転換が容易に出来る。
(もっと読む)
自動車玩具
【課題】ウイング部材が取り付けられたステー部材の塑性変形や破損を抑制する。
【解決手段】ステー部材71を介して取り付けられたウイング部材7を備える自動車玩具1において、ステー部材71は、車体本体の前後方向に屈曲された屈曲部を有する。
(もっと読む)
飛翔ロボット
【課題】 操縦機からの指示に応じて、飛翔ロボットを随意に自動的に空中静止させたり方位維持することができなかった。
【解決手段】
飛翔ロボットの機体の上部と下部とを自在継ぎ手により連結し、該自在継ぎ手を中心として該機体の上部と下部との間の相対傾き角を変える機構をサーボモータで駆動し、機体の傾斜角および/または傾斜角速度を傾斜センサで検出して飛翔ロボットの位置を制御する。また、回転翼の回転軸との傾斜角を変化させる補助翼を、方位センサで検出した方位角速度および/または方位角に基づいて動かし、飛翔ロボットの方位を制御する。
(もっと読む)
模型用サーボ装置
【課題】減速機構に遊星歯車を用いて小型で高トルクを得る。
【解決手段】筐体2内に、受信機からの信号によって回転駆動させるモータ4と、大小の平歯車が同軸上に一体化された平歯車ユニット8,10,12を組み合わせることでモータ4の回転を減速伝達する減速機構6と、モータ4の駆動軸5と一致しない位置で駆動軸5に対して平行に設けられ、減速機構6から減速伝達されたモータ4の回転をサーボホーン20に伝達する出力軸7と、出力軸7の回転角度を検出するポテンショメータ27とを備え、ポテンショメータ27により検出された出力軸7の回転角度に基づいてフィードバック制御を行う模型用サーボ装置1において、減速機構6の最後段に、太陽ギア17と、太陽ギア17の周りを自転しながら周回する遊星ギア18とを備えた遊星歯車ユニット14を出力軸7の同軸上に配置する。
(もっと読む)
ロボット玩具
【課題】サーボモータのリード線が弛むことなく、しかも外部に露出することのないロボット玩具を提供すること。
【解決手段】サーボモータが内蔵されたサーボモータユニットを備え、サーボモータによる駆動によって、隣り合う2つのブロックの間で構成される関節部に屈伸動作をさせる関節ロボット玩具であって、一方のブロックには、軸線が同一直線上に位置する出力軸及び固定軸がケースから突出して形成されたサーボモータユニットが設けられ、他方のブロックには、サーボモータユニットの出力軸に固定されてサーボモータユニットの軸線を中心に回動可能に連結される連結部が設けられ、サーボモータユニットの内部機器に接続されたリード線は、サーボモータユニットの固定軸の軸心から導出されると共に導出部分が一方のブロック又は他方のブロックに固定的に支持され、導出部分は、屈伸動作に追従して、軸心導入部分を中心に回動可能に構成されている。
(もっと読む)
羽ばたき装置
【課題】機動力が高くかつホバリングすることができる羽部を備えた羽ばたき装置を提供する。
【解決手段】羽部1100は、その一端が根元部1130に接続され、長手方向に沿って延びる第一の稜線部または谷線部を有する前縁部1110と、羽部1100は、その一端が根元部1130に接続された枝部1120とを含んでいる。枝部1120は、根元部1130から所定の距離だけ離れた所定の位置から先端部側においては、第一の稜線部または谷線部から次第に離れるように延びる第二の稜線部または谷線部を有している。前縁部1110と枝部1120との間には板状部1140が張られている。
(もっと読む)
模型用ラジオコントロール送信機
【課題】操縦者がアンテナの向きを意識することなく、無線による被操縦体の遠隔操縦における信頼性を確保することができる模型用ラジオコントロール送信機を提供すること。
【解決手段】模型用ラジオコントロール送信機10の筐体20における把手40の内部にポール状アンテナ50をそのアンテナ軸が筐体20の高さ方向に沿う中心線に対して直交又は任意の角度傾斜させた状態で配置する。
(もっと読む)
パーソナルロボット
【課題】 往復運動における外力等により生じる位置ずれを簡易、かつ、低コストの手段で効率よく解消する。
【解決手段】 頭部2がステッピングモータ211により回動制御されるパーソナルロボットであって、頭部2の特定の回動位置を検出する光センサ214aと、光センサ214aからの検出信号に基づき、頭部2を当該頭部2が正面を向いた位置を基準に所定の回動範囲をもって往復運動するようにステッピングモータ211を制御する制御手段と、を備え、光センサ214aが、頭部2が正面を向いた位置を検出するように設けられた構成としてある。
(もっと読む)
姿勢制御装置
【課題】 気流の変化に対して模型航空機を安定した姿勢に保つ姿勢制御装置を提供すること。
【解決手段】 アンテナ14は、電波を受信する。受信機51は、アンテナ14を介して、機体を制御する制御信号を受信する。水平方向検出センサー20aは、機体の水平方向の傾きを検出する。垂直方向検出センサー20bは、機体の垂直方向の傾きを検出する。フィードバック制御器52は、受信機51からの制御信号と、水平方向検出センサー20aによる傾きと、垂直方向検出センサー20bによる傾きから機体が一定の姿勢で飛行していないと判断したとき、機体を一定の姿勢に保つための信号を出力する。この信号により、サーボモータ21、22、23が機体を一定の姿勢に保つために動作する。
(もっと読む)
ロボットの操縦システム
【課題】ロボットの操縦で左右で対称的な動作を定義しておき、これを選択することによって操縦する場合が多いが、ロボットは始終向きを変えるため、どちらが左でどちらが右か直感的にはわからないことが多い。そのために操縦が難しくなり、もたもたすることになって素早い操縦ができなくなる。
【解決手段】ロボットの向きβを検出できる手段を設け、操縦器にはジョイスティックを設ける。動作を選択し、ジョイスティックを動作させたい側に倒すことで方向角αが得られる。αーβの値を使って左右のどちらであるかを決定し、ロボットに動作をさせる。操縦者は動作をさせたい側をジョイスティックで指示すればよいだけなので素早く、間違いの無い操縦ができる。
(もっと読む)
音声認識ロボット
【課題】音声認識ロボットの音声取得部のチューニングを効率良く行う。
【解決手段】音声認識ロボット100は、音声取得部として機能するマイクロホンアレー180と、音声出力部として機能するスピーカ170と、スピーカ170が装着されるロボットアーム160と、マイクロホンアレー180に対してチューニングを行うチューニング部を備える。チューニング部は、チューニングに際し、スピーカ170に基準音声を出力させるチューニング制御部と、基準音声に対する音声取得部の応答を用いてチューニングを実行するチューニング実行部とを有する。
(もっと読む)
ロボットシステム
【課題】操作が簡単で、多様な操作を行うことが可能な2足歩行ロボットシステムを提供する。
【解決手段】操作されたスイッチ操作部に割当てられた歩行動作を行わせると同時に、操作されたアナログ操作部の操作量に応じて、右足首ロール軸制御用モータ206−1、左足首ロール軸制御用モータ206−2、右股関節ロール軸制御用モータ206−9及び左股関節ロール軸制御用モータ206−10を駆動することにより、ロボット301の重心位置を移動させて、歩行の進行方向を変える。
(もっと読む)
二重反転回転翼機
【課題】風の影響を受ける環境でも風に対抗しつつ水平移動したり、ホバリングしたりすることが容易な小型の二重反転回転翼機を提供する。
【解決手段】機尾側ダクト21a近傍のピッチングプロペラ42と、目標地点の空間座標を記憶する目標地点情報記憶部61と、GPS信号により現在地点を検出する現在地点検出部51と、機体を移動させようとする水平方向の目標方位および目標地点までの水平距離を算出する水平変位算出部52と、方位センサ38bと、現在方位が水平方向の目標方位に向くように制御するヨー角コマンドを発生するとともに、ピッチングプロペラの回転速度を目標地点までの水平距離に比例するように変化させて上部メインロータ22および下部メインロータ23による水平方向の推力を制御することにより機体の水平方向の位置を制御する水平位置コマンドを発生するロータ制御部55とを備える。
(もっと読む)
ロボット制御システム
【課題】オペレータの意図通りに移動ロボットを操縦することが容易となるロボット制御システムを提供する。
【解決手段】オペレータがコントローラを操作することによって移動ロボットを操縦するロボット制御システムであって、コントローラは、移動ロボットに動作命令を入力する手段と、オペレータに移動ロボットの制御状態を表示する表示手段を有しており、移動ロボットは、本体と、本体を移動させる手段と、移動ロボットの姿勢状態を検出する手段と、コントローラから入力された動作命令に基づいて移動ロボットの姿勢状態の目標値を決定する手段と、移動ロボットの姿勢状態が決定された目標値が示す状態となるように移動手段を制御する手段と、検出手段が検出した姿勢状態と目標値との差分値を算出する手段とを有しており、表示手段は移動ロボットが算出した差分値に基づいた指標を表示する。
(もっと読む)
1 - 20 / 28
[ Back to top ]