
Fターム[2C150EF22]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 重力又は自重 (33)
Fターム[2C150EF22]に分類される特許
21 - 33 / 33
走路盤
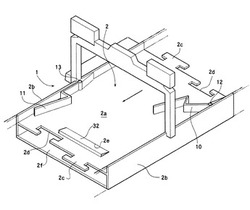
【課題】レース途中で走行環境を変化させることができる走路盤を提供すること。
【解決手段】走行路に対して進退可能で進退位置によって玩具車両の通過を妨害する障害物と、障害物を走行路に対して進退させ当該障害物の進退位置を変更するためのモータと、モータを作動させるためのモータ駆動回路と、路面の一部を構成し、玩具車両が通過する際に当該玩具車両の重さによって下方に押圧される踏板と、モータ駆動回路に設けられ、常態でOFFであり踏板が下方へ押圧されている間ONされて当該モータ駆動回路を作動させる第1のスイッチと、を備えることを特徴とする。
(もっと読む)
機能ブリックを有する玩具組立システム

組立要素を分離可能に相互接続するための連結手段を有する組立要素を備える玩具組立システムである。該玩具組立システムは前記連結手段を有する機能組立要素を備え、該機能組立要素はそれぞれ、制御可能な機能を実行するようになっている機能デバイスと、前記制御可能な機能を実行するために前記機能デバイスにエネルギーを提供するためのエネルギー源と、を有する。前記各機能組立要素は、制御信号をコード化した可視光を受信するための光センサーと、該光センサー及び前記機能デバイスに接続され、前記受信した制御信号をデコードすると共に該デコードした制御信号に応答して前記制御可能な機能を制御するようになっている制御回路とを備える。 (もっと読む)
ロボット玩具
【課題】より単純な構造でより自然な歩行動作を実現する。
【解決手段】胴体部1と、左右の足部を交互に前側に繰り出すように運足する一対の脚部2L、2Rと、駆動源11の駆動力を一対の脚部の各々に伝達する動力伝達機構3とを備えるロボット玩具100であって、一対の脚部は、胴体部に対して前後方向の軸を中心に揺動自在に設けられ、動力伝達機構は、駆動源の駆動に基づいて第1継手部材及び第2継手部材が一体となって回動する自在継手を備え、自在継手の回動によって、歩行面に接地した状態で前後方向に並んだ左右の足部20、20のうち、歩行面から離地する後側の一方の足部を他方の足部に対して外側に配置させ、且つ、他方の足部を追い越して接地する一方の足部を他方の足部と前後方向に並ばせるように一対の脚部を運足動作に同期させて揺動させる。
(もっと読む)
児童学習用マット
学習機及びゲーム機の動作駆動において使用者の駆動入力方法を改善することに関する。幼児及び子供がマット上で遊びと学習をすることによって、怪我の恐れを減らし、共同住宅での騒音対策も可能である。本技術は特に乳児・幼児の身体発達及び特定障害者の身体発達にも優れた効果を提供することができる。マット面が区画別に区分され、その区分された区画ごとに学習対象体(102)が表示されたマット(100)と;前記マット(100)に内在され、前記マット(100)の前面に区分された部分を児童が選択 (踏んだり押したりする接触など) するとマットで感知されて、制御部(300)が有無線などで受信後、内蔵・外蔵メモリーに内蔵された学習及び警告データを出力する複合的学習機でマット表面の入力仕様を変更すると同時にマットを追加に結合・拡張できることを含む。  (もっと読む)
(もっと読む)
遠隔制御装置
【課題】被遠隔制御対象体を直感的かつ容易に遠隔制御できる遠隔制御装置を提供する。
【解決手段】遠隔制御装置1は、自走車100とコントローラ200と演算部140,240とを備え、自走車100は、第1の方位基準点101に対する第2の方位基準点102の方位を検知するための方位センサ120を有し、コントローラ200は、第3の方位基準点201に対する第4の方位基準点202の方位を検知するための方位センサ220と、第3の方位基準点201を基準として、自走車100を移動させる移動方向を演算部240に入力するための操作用レバー260とを有し、演算部140,240は、方位センサ120によって検知された方位と、方位センサ220によって検知された方位と、操作用レバー260によって入力された移動方向とに基づいて、自走車100を、第1の方位基準点101を基準として移動方向に向かって移動させるように制御する。
(もっと読む)
玩具構築システム
玩具構築システムであって、対応する機能を実行し、1つ又は複数の他の構築要素と通信する制御接続手段を含む、1つ又は複数の機能構築要素を含む複数の構築要素と、1つ又は複数の機能構築要素を制御するための1つ又は複数の論理コマンドを生成するためのプログラミング環境を提供するデータ処理システムと、データ処理システムとのデータフロー接続を提供し、且つデータ処理システムからの上記論理コマンドを受信する第1の接続手段、上記論理コマンドを、少なくとも1つの上記機能構築要素の機能を制御するための制御信号に変換するようになっている処理ユニット、及び機能構築要素の制御接続手段を介して少なくとも1つの機能構築要素との制御接続を提供し、且つ制御信号を出力する第2の接続手段を備える、インタフェース構築要素とを備える玩具構築システム。 (もっと読む)
脚式移動ロボット
【課題】胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供する。
【解決手段】胴体後方の上端に取っ手を配置し、歩行中や脚式作業中や暴走中には、オペレータは機体の後方からロボットを追いかけて、取っ手を把持することによって容易に捕まえることができる。また、取っ手を操作中に万一足部や腕部が暴走しても、取っ手を掴むオペレータの腕に危害を被る心配がない。また、取っ手の把持部分は緊急停止機構を兼ね備えており、オペレータが取っ手を把持することを検出すると、全身の関節アクチュエータを脱力させる。
(もっと読む)
音響を発生する飛行遊具
【課題】本発明は音を発生する飛行遊具を提供することを目的とする。
【解決手段】飛行遊具に音源メモリ、制御機構、変換器、スピーカ、電池から構成する音響発生手段を搭載する。
(もっと読む)
脚式移動ロボットの脚体関節アシスト装置
【課題】小型且つ簡単な構成でロボットのエネルギー消費を低減しつつ、脚体の関節アクチュエータの負担を軽減することができる脚体関節アシスト装置を提供する。
【解決手段】アシスト装置11はばね手段21(気体ばね)を備えており、シリンダ23内のピストン24がロボットの脚体3の膝関節8における大腿部4および下腿部5の相対的変位運動(屈伸運動)に応じて上下動する。ピストン24の上下の気室25,26に気体が充填されている。膝関節8での曲げ度合いが所定値以下であるときには、気室25,26がシリンダ23内の溝28を介して連通して、ばね手段21は弾性力を発生せず、曲げ度合いが所定値を超えると、気室25,26が互いに密封状態となってばね手段21が弾性力を発生し、その弾性力が膝関節8に補助駆動力として作用する。
(もっと読む)
動作玩具
【課題】 迅速な動作を行う。
【解決手段】 進退移動を行う移動体13と、移動体の進退移動の駆動手段14と、駆動手段の出力に基づく回転駆動力を移動体の進退移動に沿った直動駆動力に変換して当該移動体に伝える伝達機構20とを備え、伝達機構が、進退移動方向に沿って配設された二つのラック部材21,22と、駆動手段により回転駆動して二つのラック部材に互いに逆方向への直動駆動力を付与する歯車機構30とを有している。
(もっと読む)
ロボットの動作計画方法
【課題】 本発明の目的は、ロボットの初期姿勢から最終姿勢までの安定した動作を計画することのできるロボットの動作計画方法を提供することにある。
【解決手段】 本発明のロボットの動作計画方法は、ロボットの初期及び最終姿勢に基づいて、初期姿勢と最終姿勢とをつなぐ動作を確率を用いて計画するもので、重力によってロボット各部に作用する複数のモーメントの釣合条件に基づいて、動作中のある時点での停止状態でロボットが転倒するか否かを静的に判定する静的転倒判定工程と、静的転倒判定工程において、ロボットが動作の間に静的に転倒しないと判定された場合に、重力及び動作による慣性力によって該ロボットに作用する複数のモーメントのつり合い条件を考慮して動作中にロボットが転倒しないと動的に判定されるように、該ロボット各部の速度及び/又は加速度を設定する速度/加速度変更工程とを備えていることを特徴としている。
(もっと読む)
ラジコン模型のロール角制御装置及びラジコン模型二輪車
【課題】操縦者の操縦操作を容易にすることができ、広い速度域で模型本体の姿勢を安定させることができる、ラジコン模型のロール角制御装置の提供。
【解決手段】ロール角制御装置21は、車体2に、ラジコン受信機と、操舵用モータ13を有する前輪操舵部20とが設けられ、車体20が前輪操舵部20の動作に応じてロールするとともに、操舵用モータ13に対する操作量が中立状態にある場合にはロール角がほぼ0°となる自律安定性を有しているラジコン模型に用いられるものであって、車体2のロール角を検出するロール角検出手段35と、ロール角検出手段35からのロール角θi(検出値)とラジコン受信機からのロール角目標値との偏差に基づき操舵用モータ13に対する操作量を出力してロール角θiをロール角目標値に近付ける制御手段とを備えてなる。
(もっと読む)
ロボットシステム及びロボット装置の制御方法
【課題】本発明は、より一層エンターテインメント性を向上させることを目的とする。
【解決手段】複数のロボット装置が自律的に行動するロボットシステムにおいて、各ロボット装置は無線通信手段を有し、ロボット装置同士で会話する際、当該会話の内容をコマンド及び又はセマンティクスとして双方の無線通信手段を介してロボット装置に送受信するようにした。
(もっと読む)
21 - 33 / 33
[ Back to top ]