
Fターム[2C150EF36]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 電波 (88)
Fターム[2C150EF36]の下位に属するFターム
複数の電波 (1)
変調波
搬送波の断続
Fターム[2C150EF36]に分類される特許
61 - 80 / 87
無線操縦式二輪車玩具
前輪支持体を操舵角自在となるよう様に車体に装着され、人形部を車体上部に揺動可能に取り付け、この人形部を無線操縦により進行方向に対して垂直且つ車体に対して水平方向に平行移動させて、前記人形の並行移動による重心の移動で前輪支持体を傾倒させて操舵し、この人形の移動制御部と二輪車の走行制御が無線操縦による無線操縦式二輪車玩具において、人形の移動制御部は二輪車中央に搭載されて、人形を駆動する駆動部が人形胴体部に刻設された穴部に遊嵌する無線操縦式二輪車玩具を提供する。 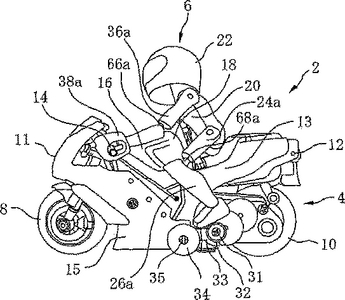 (もっと読む)
(もっと読む)
移動状態測定システム及び移動装置並びに移動状態測定計時方法

【課題】移動装置の通過時の情報を計測する移動状態測定システム及び移動装置並びに移動状態測定方法に関し、簡易に、かつ、正確に移動装置の通過時間を測定できる移動状態測定システム及び移動装置並びに移動状態測定方法を提供することを目的とする。
【解決手段】本発明は、所定の経路(121)上を移動する移動装置(112−1〜112−n)と、所定の経路(121)上に設けられた通過位置(P)を通過したことを移動装置(112−1〜112−n)に通知する通過通知手段(111)とを有し、移動装置(112−1〜112−n)は通過通知手段(111)により通過位置(P)を通過したことを検出したときに通過時の情報を保存することを特徴とする。
(もっと読む)
電子機器の防塵機構

【課題】電子機器の防塵機構を構成する部材に指や物等が不用意に接触しても、それら部材が外れたり、あるいは破損してしまう恐れがない電子機器の防塵機構を提供する。
【解決手段】電子機器1の外形を構成する筐体2の内部に内部スイッチ5が配され、筐体2に内部スイッチ5を操作するための開口部2cを有する電子機器1において、開口部2cを開閉するシャッター板6と、該シャッター板6を筐体2との間でスライド自在に挟持する押え板7を備え、筐体2には、前記シャッター板6のスライド領域を形成するスライド凹部2dが穿設されている。シャッター板6は、操作部6aが操作されて筐体2と押え板7との間でスライドすることで、開口部2cの開閉を自在におこなうことができる。
(もっと読む)
遠隔操作型走行玩具
【課題】 進路を照明し続けうる遠隔操作の照明手段と点滅しうる遠隔操作の照明手段とを含むヘッドライト装置を備えた新規の遠隔操作型走行玩具を提供するを提供するものである。
【解決手段】 遠隔操作器を用いて離れた位置から操作しうるヘッドライト装置を備えた遠隔操作型走行玩具に関し、連続照明発光体として機能するヘッドライト2と点滅照明発光体として機能するフラッシュライト3を並べて設けられた左右一対のヘッドライト装置4、5を車体6の正面左右両側個所に装備し、舵取制御用操作部、速度制御用操作部、ヘッドライトの点灯・消灯制御用操作部及びフラッシュライトの点灯・消灯制御用操作部を備えた遠隔操作器により前記照明手段を遠隔操作しうるようにされたことを特徴とする。
(もっと読む)
飛行玩具
【課題】 任意のキャラクターを有するモデルの飛行体を、遠隔操縦により自由に上昇下降及びホバリングができる飛行玩具を提供する。
【解決手段】 キャラクターを有するモデルを模した飛行体11と、この飛行体11の上部に設けられ同軸芯で互いに反対方向に回転する上部ローター16及び下部ローター28と、少なくとも前記一方のローターと連動して回転する姿勢を安定に保つためのスタビライザー20と、前記飛行体11の内部に設けられ前記上部ローター16及び下部ローター28並びにスタビライザー20を回転させる駆動部31と、前記飛行体11の内部に設けられ前記駆動部31の動作を制御する遠隔操縦用の制御回路43及び電源となるバッテリー44とを備える。
(もっと読む)
ラジオコントロール玩具用受信回路ユニット
【課題】 受信回路ユニットを別体として着脱自在とし、ひとつの送信機で複数種類のラジオコントロール玩具を駆動制御できるように構成したラジオコントロール玩具用受信回路ユニットを得る。
【解決手段】 駆動機構を搭載する複数種類のラジオコントロール玩具にそれぞれ受信回路ユニット装着部を設け、該受信回路ユニット装着部に対してひとつの受信回路ユニットを互換可能に着脱自在とし、ひとつの送信機で複数種類のラジオコントロール玩具を駆動制御できるように構成したラジオコントロール玩具用受信回路ユニットを提供する。
(もっと読む)
玩具
【課題】移動体模型の位置又はその位置の変化を常時監視し、さらに移動体模型が道路模型上を正しく走行していない場合に、その状態を報知する。
【解決手段】基盤上における移動体模型の位置又は位置変化を移動体模型の移動に連動して非接触で検出する位置検出手段と、位置検出手段による移動体模型の位置又は位置変化の検出に基づいて、当該移動体模型の前記道路模型上における位置又は位置変化の正誤に関する情報を遊戯者に対して報知する報知手段と、を備える。
(もっと読む)
ラジオコントロール送信機
【課題】少ないスペースで多くの副操作部を配設でき、副操作部の更なる拡充あるいは高機能化を図ることができるラジオコントロール送信機を提供する。
【解決手段】ラジオコントロール送信機1は、副操作部の一つとして機能する二連式レバーユニット10を備える。二連式レバーユニット10は、各々回動中心が同一の二つの回動軸を有する二連式可変抵抗器11と、各回動軸に固定される第1操作部12及び第2操作部材13と、前記二連可変抵抗器11を筐体2に固定する固定部材14を備えている。前記第1操作部材12及び第2操作部材13をそれぞれ各別に回動操作することにより、二つの制御信号を形成することができる。
(もっと読む)
無線操縦式二輪車玩具
前輪支持体を操舵角自在となるよう様に車体に取り付け、人形部を車体上部に揺動可能に取り付け、この人形部を無線操縦により進行方向に対して垂直且つ車体に対して水平方向に平行移動させて、前記人形の並行移動による重心の移動で前輪支持体を傾倒させて操舵する無線操縦式二輪車玩具において、前記前輪支持体は、車体に接続される接続部と前記接続部と特定の角度を持ってその端部同士が接合されて水平方向が長軸となる長円の貫通孔を上部に備える長円筒状体とを備えるフロントフォーク接合部と、前記貫通孔に挿入されて回動及び揺動可能に固定される結合ピンと前記結合ピンが上部から突出されるブラケットと前記ブラケット下部に設けられてその間にタイヤが備えられる2本の軸部とを備えるフロントフォークと、からなる無線操縦式二輪車玩具を提供する。 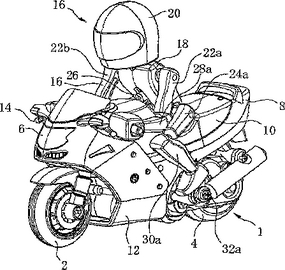 (もっと読む)
(もっと読む)
車両の遠隔操作識別方法及び装置
走路を周回するレースで複数の各車両を自動的に追跡する装置及び方法。本装置は,追跡対象の車両の各々に,及び,RFIDに通電してゲート通過が判断されたときに車両の識別情報を送信させるように適応されるゲートにRFIDタグを採用する。データ伝送の衝突及び結果的に生じる識別データの損失は,RFID応答に対する指令を介して低減され,可能性が最も高い応答システムに基づいて参加者情報記録指令で修復される。本装置は,レースで個々の車両参加者を追跡し,レース参加者を登録するのにも採用することができる。RFIDタグを全ての参加者に付けて,中央位置から個々の遠隔地の走路での進行を追跡することによって,異なる地理上の場所において異なるコースでレースを追跡することが可能である。  (もっと読む)
(もっと読む)
リモコン二輪車のロール角制御装置
操縦者の操縦操作を容易にすることができ、広い速度域でリモコン二輪車の姿勢を安定させることができる、リモコン二輪車のロール角制御装置を提供するために、ロール角制御装置21を設けた。ロール角制御装置21は、車体本体のロール角を検出するロール角検出手段35と、操舵軸又はフロントフォークに左右方向の回転トルクを付加する操舵用アクチュエータ13と、ロール角検出値とリモコン受信機からのロール角目標値とに基づき操舵用アクチュエータに対する操作量を出力してロール角検出値をロール角目標値に近付けるように制御する制御手段29と、少なくとも中立点を境にして舵角が左右の何れに切れているかを検出する舵角検出手段50とを備え、前記制御手段29によって、舵角検出手段にて検出した舵角が右切れ方向の場合には右回転トルクを付加し、舵角検出手段にて検出した舵角が左切れ方向の場合には左回転トルクを付加するような信号を、操舵用アクチュエータに対する操作量に付加するように制御するキャスタ効果制御手段51を構成した。  (もっと読む)
(もっと読む)
脚式移動ロボットの力センサ異常検知装置
【課題】床反力を検出する力センサの異常を精度良く検知するようにした脚式移動ロボットの力センサ異常検知装置を提供する。
【解決手段】脚式移動ロボットにおいて、ロボットを起動させるときに足踏み動作を行なうようにロボットの動作を制御し(S104)、足踏み動作のときの力センサの出力が所定の範囲内にあるか否か判定し(S106,S108,S110,S112,S114)、その判定結果に基づいて力センサの異常を検知する(S102)。
(もっと読む)
2足歩行ロボットの充電システム
【課題】2足歩行ロボットのバッテリの充電を、2足歩行ロボットの姿勢を安定させ、火花放電やノイズの発生を防止して行う充電システムを提供する。
【解決手段】2足歩行ロボット10に備えられたバッテリ11を充電する充電システムであって、充電装置1は、2足歩行ロボットを着座姿勢に保持する着座保持手段2と、2足歩行ロボット10が着座保持手段2に着座したときに2足歩行ロボット10に設けられた受電コネクタ12と嵌合する給電コネクタ3とを備え、また、受電コネクタ12と給電コネクタ3が接続状態にあるか否かを検知する接続状態検知手段と、バッテリ11に対する充電電流を出力する充電用電源と、接続状態検知手段により受電コネクタ12と給電コネクタ3が接続状態にあることが検知されたときに、該充電用電源からバッテリ11に充電電流を供給してバッテリ11を充電する充電制御手段とを有する充電ユニット4を備える。
(もっと読む)
パーティー用玩具
【課題】
参加者同士のコミュニケーションを促進し、パーティーを確実に盛り上げることができるパーティー用玩具を提供することを目的とする。
【解決手段】
本発明に係るパーティー用道具は、手錠を模した形状を有し、第1の参加者の手に装着される手錠ユニット11と、第2の参加者が所持し、当該手錠ユニットによる拘束を解除するための鍵ユニット12とを備えたものである。そして、手錠ユニット11は、複数の第1の参加者それぞれの手に装着され、複数の第2の参加者はそれぞれ、手錠ユニット11による拘束を解除するための複数の鍵ユニット12を所持し、複数の手錠ユニット11は、複数の第1の参加者と複数の第2の参加者が順次行う解錠作業によって、当該手錠ユニット11を解錠可能な鍵ユニット12に対応付けられる。
(もっと読む)
飛行体
【課題】燃料電池を効果的に設置することができる飛行体を提供する。
【解決手段】飛行体1は、外面71に沿った気流を発生させるカウリング7と、電力を供給する燃料電池30とを備えている。カウリング7の少なくとも一部は、燃料電池30の一部を構成している。
(もっと読む)
ロボットコントロールシステム
【課題】ロボットの操作性を向上させることができるロボットコントロールシステムを提供すること。
【解決手段】ロボット1と、ロボット1に対してRAWコマンドを送信する送信機2とを有するロボットコントロールシステム100であって、ロボット1は、複数のサーボモータ5と、センサ部6と、制御部3とを備える。制御部3が、RAWコマンドを受信したとき、センサ部6の検出結果と制御部で実行されるプログラムとにより得られたロボット1の状態に応じた動作コマンドを設定し、該動作コマンドに基づいてサーボモータ5を、それぞれ駆動することによりロボット1の動作を実現する。
(もっと読む)
シューティングゲームシステム
【課題】 勝敗の判定を的確に行えるようなシューティングゲームシステムを提供すること。
【解決手段】 リモコン装置2a、2bの方向指示部12a、12bを操作することによって各々ロボット1a、1bの移動方向等の動作を制御し、赤外線発射スイッチ13a、13bを操作することによって各ロボット1a、1bは自己のIDを含む赤外線信号14a、14bによって敵ロボットを射撃する。被弾したロボットは被弾させたロボットのID及び自己のIDを含む被弾信号を判定装置15に送信し、判定装置15は被弾信号に基づいて、相打ちが発生して所定時間内に複数の被弾信号を受信した場合でも適切な判定を行い、ゲーム終了後、各チームのロボットは、判定装置15からの勝敗信号に応答して勝敗に応じた動作を行う。
(もっと読む)
遊戯機及びその制御装置
【課題】 予めプログラムの必要がなく、曲に同期させて発光装置をコントロールすることができる遊戯機を提供する。
【解決手段】 再生用のスピーカと、光の放射状態が制御される発光装置と、前記スピーカからの再生音との関係で前記発光装置を制御する制御信号を出力する制御装置と、を備え、前記制御装置は、再生すべき音楽を構成する音楽周波数成分の中から所定の周波数範囲の低周波成分を抽出し、抽出した低周波成分から前記制御信号を生成するものとして構成されている。
(もっと読む)
ロボット
本発明は、例えば家の中など障害物がある環境で自由に動き回わるのに適した構造を有するロボットを提供することを目的とし、カメラで得られた画像を基地局に無線で送信することにより、その画像を、基地局を介して、その基地局との間で無線通信を行なう通信端末に送信するとともに、その通信端末の操作によりその画像上に指定された移動目標位置情報を基地局を介して無線で受信する通信部と、その通信部で得られた移動目標位置情報により特定される移動目標位置までロボットを移動させる動作制御部とを備えた。  (もっと読む)
(もっと読む)
ラジコン模型のロール角制御装置及びラジコン模型二輪車
【課題】操縦者の操縦操作を容易にすることができ、広い速度域で模型本体の姿勢を安定させることができる、ラジコン模型のロール角制御装置の提供。
【解決手段】ロール角制御装置21は、車体2に、ラジコン受信機と、操舵用モータ13を有する前輪操舵部20とが設けられ、車体20が前輪操舵部20の動作に応じてロールするとともに、操舵用モータ13に対する操作量が中立状態にある場合にはロール角がほぼ0°となる自律安定性を有しているラジコン模型に用いられるものであって、車体2のロール角を検出するロール角検出手段35と、ロール角検出手段35からのロール角θi(検出値)とラジコン受信機からのロール角目標値との偏差に基づき操舵用モータ13に対する操作量を出力してロール角θiをロール角目標値に近付ける制御手段とを備えてなる。
(もっと読む)
61 - 80 / 87
[ Back to top ]