
Fターム[2C150EF36]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 電波 (88)
Fターム[2C150EF36]の下位に属するFターム
複数の電波 (1)
変調波
搬送波の断続
Fターム[2C150EF36]に分類される特許
41 - 60 / 87
遠隔操作装置及び玩具

【課題】音源から遠距離であっても確実に音声に反応して動作し、操作対象物を小型化することができ、また操作対象物を複雑に動作させ得る遠隔操作装置及び玩具を提供する。
【解決手段】音声信号の周波数に応じた操作指示信号を生成し、生成された操作指示信号を無線送信する送信装置と、前記送信装置とは異なるケーシングに設けられ、前記送信装置から送信された操作指示信号を受信し、当該受信された操作信号に対応する駆動制御信号を出力する受信装置と、を備える。
(もっと読む)
模型移動体用動力継手、及び模型移動体

【課題】フレームにエンジンが固定された模型移動体に用いられ、エンジンの駆動軸の回転力を、フレームに回転自在に軸支された被駆動軸に伝達する模型移動体用動力継手において、エンジンの振動のエネルギーが駆動軸から被駆動軸に伝達されることを抑制する模型移動体用動力継手、及びこの模型移動体用動力継手が用いられた模型移動体を提供する。
【解決手段】模型移動体用動力継手3は、駆動軸21側に設けられた駆動部材6と、駆動部材6から軸方向に間隔を存して被駆動軸41,42側に設けられた被駆動部材7と、駆動軸部材6と被駆動部材7との間に位置させて、駆動部材6又は被駆動部材7の何れか一方に設けられた弾性部材6とを備え、弾性部材6が駆動部材6又は被駆動部材7の何れか他方と駆動軸21の回転方向で接触することにより駆動軸21の回転力が被駆動軸41,42に伝達される。
(もっと読む)
模型用ラジオコントロール送信機
【課題】操縦者がアンテナの向きを意識することなく、無線による被操縦体の遠隔操縦における信頼性を確保することができる模型用ラジオコントロール送信機を提供すること。
【解決手段】模型用ラジオコントロール送信機10に2本のポール状アンテナ40a、40bを各々のアンテナ軸が異なる方向に向くように設け、各ポール状アンテナ40a、40bからの操縦信号の送信を時分割で交互に切り換える。
(もっと読む)
ラジコン模型
【課題】操縦者(取り扱い者)等の安全を確保すると共に、ラジコン模型自身の安全確保も実現したラジコン模型を提供する。
【解決手段】中央制御装置3に有する安全管理部312は、バッテリー27が正しく接続された時は、ブザー制御部313にバッテリーが接続されたことを示す第1パターン鳴動信号指令を供給し、バッテリーが正しく接続された状態でスタートボタンが押されているチェック期間は、ブザー制御部313にスタート操作中を示す第2パターン鳴動信号指令を供給し、チェックによって正常と判定した場合には、ブザー制御部313に動力モータ7が駆動可能なスタンバイ状態になったことを告知する第3パターン鳴動信号指令を供給する判定部314を有する。
(もっと読む)
ラジコン模型のサーボモータ中立位置設定装置
【課題】サーボモータの出力軸にサーボホーンを嵌合する単純構造で高い精度で中立位置を設定可能としたラジコン模型のサーボモータ中立位置設定装置を提供する。
【解決手段】サーボモータ1の出力軸20のサーボホーン40の嵌合穴50と嵌合する部分を角柱とし、該角柱の外側壁の少なくとも1面にサーボホーン40の嵌合穴50の挿入方向と平行に形成された凸条20Aを形成し、嵌合穴50の内側壁の少なくとも1面に出力軸20の外側壁に有する凸条20Aの形成方向と同方向に形成されて当該凸条に嵌合する凹条50Aを設け、筐体側に、サーボモータ1の出力軸20の一方向での最大回転角度と該一方向と逆の方向での最大回転角度を規制する制限する構造を設け、サーボモータ1の出力軸20が一方向と逆方向の最大回転角度位置にある時のポテンショメータの各出力値の中間値をサーボモータの出力軸の標準中立位置と定める。
(もっと読む)
シューティング玩具
【課題】 コントローラと、移動玩具及びターゲットとの間で、それぞれ異なる信号を受信しなければならず、信号の種類が多くなってシューティング玩具の信号送信手段の構成が複雑にならざるを得なかった。
【解決手段】 認識対象画像取得手段41が取得した認識対象画像と、判定基準用画像データ記憶手段45に記憶された判定用基準画像とを比較して、画像認識によりシューティングが命中したか否かを決定する。
(もっと読む)
ロボットシステム
【課題】操作が簡単で、多様な操作を行うことが可能な2足歩行ロボットシステムを提供する。
【解決手段】操作されたスイッチ操作部に割当てられた歩行動作を行わせると同時に、操作されたアナログ操作部の操作量に応じて、右足首ロール軸制御用モータ206−1、左足首ロール軸制御用モータ206−2、右股関節ロール軸制御用モータ206−9及び左股関節ロール軸制御用モータ206−10を駆動することにより、ロボット301の重心位置を移動させて、歩行の進行方向を変える。
(もっと読む)
擬似ペット育成装置、擬似ペット育成プログラム、擬似ペット育成方法、消費カロリー計算装置、消費カロリー計算プログラム及び消費カロリー計算方法
【課題】本発明では、例えば、正確に測定した運動量に基づき擬似ペットを育成することを目的とする。また、本発明では、擬似ペットの育成に参加を促す手段を提供することを目的とする。
【解決手段】位置情報取得部112は現在位置を示す位置情報と高さとを位置情報取得装置990により取得する。移動情報算出部114は位置情報の履歴からユーザの移動を示す移動情報と傾斜とを算出する。移動距離算出部120は移動情報に基づきユーザの移動距離を算出する。カロリー計算部122は移動距離と傾斜とに基づき消費カロリーを計算する。育成制御部126は移動距離に基づき擬似ペットの育成を制御する。また、通信部134は他の擬似ペット育成装置10と通信することで、共同で擬似ペットの育成を行うことができる。
(もっと読む)
ロボットゲーム環境のための標的システム
ロボットゲーム環境のために、標的システム10が提供される。標的システム10は、標的ロボット16の送信機12と、攻撃ロボット18の指向性を有する受信機14とを有し、攻撃ロボット18の射撃手段の精度を改良することを可能にする。受信機14は、筐体に設けられた開口により細長いチャネルを定義する筐体24を含む。開口は、開口が標的ロボット16と一直線に位置付けられる場合に、受信機14が送信機12からの電磁信号20を受信することを可能にする。 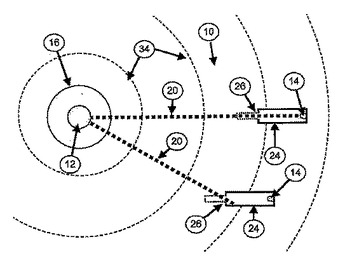 (もっと読む)
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット10はアンテナ58を含み、RFIDタグ12、14および16から送信されるかつRFIDの情報を重畳した電波を受信する。ユーザA、BおよびCは、それぞれ、タグ12,14および16を所持または装着している。したがって、ロボット10は、RFIDの情報を取得して、その近傍或いは周囲に存在するユーザA、BおよびCを認識する。また、ロボット10は、RFIDの情報を取得した際の電波強度から最近傍に存在するユーザを特定し、当該ユーザに対してコミュニケーション行動を取る。
【効果】 近傍或いは周囲に存在するユーザを個別に認識することができ、特定したユーザに適したコミュニケーション行動を取ることができる。
(もっと読む)
ロボットシステム
省電力ロボットシステム(100)は、移動式ロボット(104)のある環境下に置かれる、少なくとも1つの周辺装置(102)を含む。周辺装置は、周辺装置が完全に動作するアクティブモード(938)と、周辺装置が少なくとも部分的にアクティブでないハイバネーションモード(932)とをもつ制御装置(1026)を有する。移動式ロボット(104)は、無線通信構成要素(1024、1044)を経由して周辺装置(102)と通信し、周辺装置(102)の無線通信構成要素(1024、1044)とロボット(104)とが互いの範囲内になると、ハイバネーションモード(932)から周辺装置(102)を一時的に作動させる作動ルーチン(904)をもつ制御装置(1046)を有する。  (もっと読む)
(もっと読む)
無線操縦飛行機
【課題】駆動部の容量を小さくすることができ、無線操縦飛行機を小型化することができるようにする。
【解決手段】飛行体11と、飛行体11と通信部を介して接続された飛行体11を飛行させる地上コントローラ12とを有する。飛行体11は、胴部14、胴部14に配設された駆動部、駆動部を駆動することによって推進力を発生させる推進装置、相対的に移動自在に配設された複数の翼体38、39から成る主翼25、各翼体38、39の相対的な位置を変更して、主翼25の実質的な面積を変更するための開閉機構43、及び被搬送物を選択的に保持し、落下させるための落下装置64を備える。主翼25の実質的な面積を変更することによって、飛行速度を変更することができるので、推進装置を回転させるための駆動部の容量を小さくすることができる。
(もっと読む)
遠隔制御デバイスに対する紛失または損傷を低減する方法および装置
第1送受信機(9)と、第2ワイヤレス送受信機(20)および第2プロセッサ(24)を有する遠隔制御式装置(18)を制御する第1プロセッサ(16)とを有する遠隔制御デバイス(12)。プロセッサは、ワイヤレス送受信機(複数可)によって送信される信号の信号品質レベルを測定して、信号品質レベルが、所定の閾値未満に下がる場合、遠隔制御式装置の向きを変えるようにプログラムされることができる。プロセッサ(複数可)は、遠隔制御デバイスの方に遠隔制御式装置の向きを変える(56)か、遠隔制御式装置を安全に停止させるか、または、信号品質レベルが所定の閾値を越えて留まる限り、遠隔制御式装置がミアンダリングするようにさせる制御信号を送信するようにさらにプログラムされることができる。 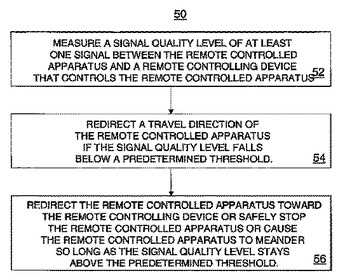 (もっと読む)
(もっと読む)
携帯端末装置およびプログラム
【課題】 一般的な携帯電話を幼児向けの玩具として機能させることが可能な携帯端末装置を提供する。
【解決手段】 通常の機能を実行する通常モードと、玩具としての機能を実行する玩具モードと、を有し、複数の操作手段と1対1に対応した複数のデータ(音声や画像)を記憶する記憶手段と、データを出力する出力手段と、通常の機能の実行を制御する制御手段と、を有し、玩具モードが選択された場合、制御手段は、操作手段の操作による通常の機能の実行を制限し、操作手段が操作された場合、出力手段は、操作手段に対応したデータ(音声や画像)を出力する。
(もっと読む)
模型自動車
【課題】 本発明の目的は、シャーシのサイズを規格内とし、所定のサイズのモータやバッテリーを使用しつつ、シャーシの横幅を狭くすることができる構造のRCカーを提供することである。
【解決手段】 本発明のRCカー1は、長細いバッテリー22と、バッテリー22から給電されると共に送信機23から無線送信される制御信号を受信する受信機28と、制御信号を増幅する動力用モータアンプ26と、動力用モータアンプ26で増幅された制御信号によって回転が制御される動力用モータ14と、これらの部品が配設されるシャーシ2と、前記シャーシ2の前部に配設され動力用モータ14によって駆動される一対の前輪4と、シャーシ2の後部に配設され動力用モータ14によって駆動される一対の後輪6とを備える。さらに、バッテリー22の長手方向の中心線がシャーシ2の長手方向の中心線A上に位置するように、前記バッテリー22を前記シャーシ2に配設する。
(もっと読む)
ポータブルデバイス
【課題】
【解決手段】ポータブルデバイスは、振動を提供するモータ、このモータに動力を供給する動力源、前記モータの方向を制御するスイッチデバイス、面に係合してモータが振動するときにデバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段、及び前記スイッチデバイスに接続されている入力デバイスを具え、前記スイッチデバイスは入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されている。有利なことに、推進手段は一セットの毛を具える。角度を付けた毛を使用することで、後方向の摩擦が増加し、振動したときに前記デバイスを前方へ動かす。振動が物体を後方へ移動させようとすると、この毛が面に食い込み、振動が物体を前方へ移動させようとすると、毛が面上を摺動する。
(もっと読む)
3輪車玩具の方向制御装置
【課題】 高速あるいは急な方向変換をする場合でも、安定した走行ができる新たな機構の3輪車玩具の方向制御装置を提供する。
【解決手段】 車体フレーム11と、車体フレーム11の一方側に取り付けたキャスタ軸14に回動可能に取り付けたフォーク部15と、フォーク部15の下端部に回転可能に取り付けた車輪12と、車体フレーム11の走行方向の他方側に一端部側を回動可能に取り付けた左右の車輪支持部17と、左右の車輪支持部17の他端部側にそれぞれ設けた左右の車輪13と、左右の車輪13を回転駆動させる駆動部18と、左右の車輪13間に高低差を生じさせる車輪上下機構20と、送信機26から送信される制御信号を受信して駆動部18及び車輪上下機構20を駆動するための受信機40及び各部へ電源を供給する電池46とを備える。
(もっと読む)
遠隔操作玩具システム、及びその駆動機器
送信機(1)によって遠隔操作される駆動機器(2)は、第1のパラメータ(D)及び第2のパラメータ(L)を保持し、第1のパラメータ(D)に基づく攻撃信号を送信し、受信した特定信号に含まれる情報に応じて第2のパラメータ(L)を変化させる。送信機(1)及び駆動機器(2)は、他の一対の駆動機器(2)及び送信機(1)を対戦相手とし、駆動機器(2)は他の駆動機器(2)から送信される攻撃信号を特定信号として受信し、該特定信号に含まれる前記情報に応じて第2のパラメータ(L)を変化させる対戦遊戯が実現できる遠隔操作玩具システムにおいて、送信機(1)はユーザによる特定の操作に応じた特定情報を制御信号に含ませ、駆動機器(2)は、制御信号に含まれる特定情報に基づいて自己の第1のパラメータ(D)を変化させる。 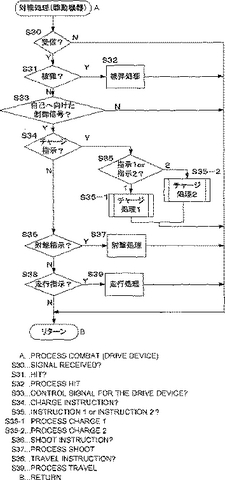 (もっと読む)
(もっと読む)
音が出る本
【課題】複数箇所から複数の音を出す事が可能な音が出る本を提供する事。
【解決手段】小片側アンテナ識別情報と小片側アンテナとを有する小片と、前記小片側アンテナと通信して前記小片側アンテナ識別情報を受信する支持台紙側アンテナと、前記支持台紙側アンテナが少なくとも2つ設けられた支持台紙と、前記支持台紙に設けられた冊子体と、冊子体の開かれている頁の頁情報を作成する頁情報作成手段と、音を記憶する音記憶手段と、前記音記憶手段に記憶されている音を再生する音再生手段と、前記小片側アンテナと通信した前記支持台紙側アンテナを識別して、支持台紙側アンテナ識別情報を作成する支持台紙側アンテナ識別情報作成手段と、前記支持台紙側アンテナ識別情報、前記小片側アンテナ識別情報、及び、頁情報に基づき、前記音記憶手段から音を選択し、前記音再生手段で再生する音計算手段を有することを特徴とする音が出る本である。
(もっと読む)
移動装置検知システム
【課題】移動装置の通過時の情報を計測する移動状態測定システム及び移動装置並びに移動状態測定方法に関し、簡易に、かつ、正確に移動装置の通過時間を測定できる移動状態測定システム及び移動装置並びに移動状態測定方法を提供することを目的とする。
【解決手段】本発明は、コース(121)上に設定された所定のトラック(122−1〜122−n)上を移動する移動装置(112−1〜112−n)と、所定のコース(121)上に設けられ、移動装置(112−1〜112−n)が通過したことを検出する通過検出装置(111)とを有する移動装置検知システムにおいて、移動装置(112−1〜112−n)を個別に識別する識別情報に応じた識別手段(311)を有し、通過検出装置(111)は、識別手段(311)を検知することにより、移動装置(112−1〜112−n)の通過及び識別情報を検知することを特徴とする。
(もっと読む)
41 - 60 / 87
[ Back to top ]