
Fターム[2D003AC02]の内容
掘削機械の作業制御 (15,843) | 作業形態 (293) | 走行力により作業するもの (157) | 整地作業、敷ならし (31)
Fターム[2D003AC02]の下位に属するFターム
アングル、チルト (3)
Fターム[2D003AC02]に分類される特許
1 - 20 / 28
フロントドーザ用油圧回路
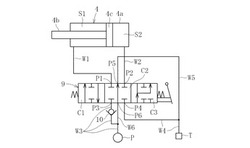
【課題】フロントドーザを装着した作業車両でブレードを接地して前輪を浮かせる際にシリンダ装置が一時停止することを抑制すること。
【解決手段】フロントドーザ用油圧回路は、フロントドーザのブレードを作業車両に対して揺動させるために伸縮するシリンダ装置4と、切換弁9を備える。切換弁9は、ポートP1〜P3を有する。ポートP1は第1の流通路W1を介してシリンダ装置4の圧力室S1に接続する。ポートP2は第2の流通路W2を介してシリンダ装置4の圧力室S2に接続する。ポートP3は、第3の流通路W3を介してポンプPの吐出口に接続する。切換弁9は、第1セクションC1と、第2セクションC2と、第3セクションC3とを切り換え可能に備えている。第3セクションC3は、第1〜第3の流通路W1〜W3を相互に接続する。
(もっと読む)
トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法

【課題】傾きを考慮した精度の高い水平座標位置データを求めることが可能なトータルステーション用ターゲットを提供する。
【解決手段】本発明のトータルステーション用ターゲット100は、トータルステーションから射出されるレーザー光を反射する光学部110と、光学部110と間の相対位置が変化することがないように固定されると共に、水平面内における第1の軸の周りの傾きを検出する第1傾斜センサ121と、前記光学部と間の相対位置が変化することがないように固定されると共に、水平面内における前記第1の軸と直交する第2の軸の周りの傾きを検出する第2傾斜センサ122と、前記第1傾斜センサ121によって検出された第1検出情報と、前記第2傾斜センサ122によって検出された第2検出情報とを出力する出力部123と、を有することを特徴とする。
(もっと読む)
ローダ作業機の油圧回路及びその油圧制御方法
【課題】ブームシリンダに供給可能な作動油をブーム制御弁から作業具制御弁へ一部短絡させて、作業具の掬い動作を全速で行いながらブームの下降速度を遅くする。
【解決手段】ブーム2を昇降させるブームシリンダ3用のブーム制御弁4と、ブーム制御弁4の下流側であって作業具5を掬い・ダンプさせる作業具シリンダ6用の作業具制御弁7とを備え、制御弁4、7に、水平線に対する作業具5の姿勢を維持しながらブーム2を上昇させる平行制御手段8と、作業具5を底面接地姿勢にすべく掬い動作させながらブーム2を下降させる水平接地制御手段9とを設け、ブーム制御弁4は、水平接地制御手段9の作動時にブームシリンダ3に供給可能な作動油の一部を、ブーム制御弁4のバイパスラインPB1から作業具制御弁7のメインラインPP2へ短絡させ且つブームシリンダ3を作動させた後の作動油に合流させて作業具制御弁7に供給する分流手段10を有している。
(もっと読む)
機械上の参照位置に対する器具上の位置を決定するためのシステムおよび方法
開示は、一態様において、機械上の参照位置に対する機械上の位置を決定するための方法を記載している。本方法は、座標系における参照位置を決定するステップと、座標系における機械上の第1の所望される位置を決定するステップと、参照位置に対する第1の所望される位置を決定するステップとを含む。本方法は、さらに、第1の相対的な所望される位置を用いて制御システムを更新するステップを含む。 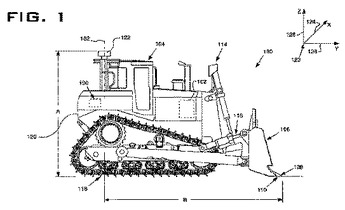 (もっと読む)
(もっと読む)
ハイブリッド式建設機械の制御システム及び方法
【課題】ハイブリッド式建設機械の制御システム及び方法を提供する。
【解決手段】エンジン10の作業モードを検出するモード検出手段60と、油圧アクチュエータ15の駆動に必要な油圧ポンプ13の出力トルクを検出するトルク検出手段70と、エンジン10の作業モード毎に設定されたエンジントルクの下限及び上限の基準を貯蔵しているメモリ40と、モード検出手段60により検出された作業モードに応じて設定された下限及び上限の基準とトルク検出手段70により検出された油圧ポンプ13の出力トルクを比較し、油圧ポンプ13の出力トルクが下限の基準に達しない場合は、未到達分だけエンジン10の負荷になるようにモータ‐発電機17の発電を制御し、且つ、油圧ポンプ13の出力トルクが上限の基準を超える場合には、超過分だけエンジン10の出力を補助するようにモータ‐発電機17のモータ作動を制御するハイブリッド制御手段50を含む。
(もっと読む)
ドーザ装置
【課題】あぜ面形成作業を容易かつ安価に実施することができるドーザ装置を提供すること。
【解決手段】トラクタ1に装着される左右のサイドフレーム2と、該サイドフレーム2に基端を枢着されたブーム3と、該ブーム3と前記サイドフレーム2との間に配置されたブームシリンダ4と、前記ブーム3の先端に枢着されたドーザブレード5と、該ドーザブレード5と前記ブーム3との間に配置されたチルトシリンダ6とを備えており、前記ドーザブレード5とブーム3との間に、前記チルトシリンダ6によるドーザブレード5を、あぜ面を形成する角度に設定してそれ以上のドーザブレード5のチルトダウン動作を規制する角度設定手段7を設けた。
(もっと読む)
油圧駆動装置
【課題】ブレード動作時の作動油の供給特性に対する個体差の影響を吸収でき、ピッチ操作時の意図しないチルト動作を防止するために、ブレード駆動用の油圧シリンダへの作動油の供給流量調整が可能な油圧駆動装置を提供すること。
【解決手段】ブレードの油圧駆動装置において、第1油圧シリンダへの作動油供給流量を制御する第1制御弁は、スプールストローク量が第1閾値を超えた領域では、供給流量の増加勾配が第1閾値での増加勾配より小さい第1流量特性を有し、第2油圧シリンダへの供給流量を制御する第2制御弁は、スプールストローク量が第1閾値より小さな第2閾値を超えた領域では、第1流量特性の増加勾配より大きな増加勾配の第2流量特性を有し、第2閾値を超えた領域におけるスプールストローク量の増大によって、第2油圧シリンダへの供給流量が第1油圧シリンダへの作動油の供給流量よりも大きくなる。
(もっと読む)
建設機械の油圧ポンプ制御装置
【課題】二つの油圧ポンプを一つの駆動軸にパラレルに接続した構成を前提として、油圧ポンプのポンプ容量を抑えずに駆動軸の破損を防止する。
【解決手段】左走行ポンプ12とドーザポンプ13が共通の中間軸にパラレルに接続された構成を前提として、ドーザポンプ用のリリーフ弁として比例電磁式の可変リリーフ弁37を設け、走行とドーザ作動の同時操作時に、コントローラ30により左走行ポンプ12の出力トルクに応じて可変リリーフ弁37の設定圧力を制御することにより、ドーザポンプ13の出力トルクを制限するように構成した。
(もっと読む)
ブルドーザの自動変速装置
【課題】オペレータの選択によって任意の速度段で発進が可能なブルドーザの自動変速装置において、変速無視時間を設定しつつ発進直後等の低速時にも十分な牽引力が得られるようにする。
【解決手段】この装置は、自動変速手段と、速度段維持手段と、負荷検出手段と、制御規制手段と、を備えている。自動変速手段は車速に応じて複数の速度段を切り換える。速度段維持手段は、所定の変速無視時間が設定されており、変速完了後において変速無視時間が経過するまでは自動変速手段の切換指示を無視して選択されている速度段を維持する。負荷検出手段は車両の負荷を検出する。制御規制手段は、負荷が所定の負荷以上の場合には、変速無視時間が経過していない期間中でも自動変速手段の切換指示に従うように速度段維持手段の制御処理を規制する。
(もっと読む)
掘削支援装置および掘削支援方法
【課題】建設機械による直線掘削を簡便に且つ精度良く行うことができる掘削支援装置を提供する。
【解決手段】建設機械を用いた掘削作業を支援する装置であって、掘削箇所近傍に設置され、レーザ光を基準面Sに沿って出射する投光器2と、レーザ光を受光する受光部を長手方向に沿って複数有し、アーム4に取り付けられる受光器11と、アーム4の傾斜角度を検知する傾斜センサ12と、受光器11及び傾斜センサ12の検出信号に基づいて基準面Sからバケット3先端までの実際の掘削深さH1を演算し、これを予め設定された指定掘削深さH3と比較して掘削誤差H2を求める制御部とを備える。
(もっと読む)
モータグレーダのブレード高さ制御装置
【課題】モータグレーダのブレード高さ制御装置において水糸のような基準線の設定の手間を削減することができ、また、モータグレーダに適した簡単な構成とする。
【解決手段】モータグレーダ10の車体に設定された測定点に取り付けられて、放射状にレーザビームを照射し、複数の反射地点から反射されたレーザビームを受信するレーザスキャナ32と、レーザスキャナ32から得られる測定点と複数の反射地点との計測距離から、ブレード22の高さを調整するための調整信号を出力する制御手段と、を備える。制御手段は、前記測定点と複数の反射地点との計測距離から各反射地点の高さを演算し、前記複数の反射地点の高さの中から、ブレード22の高さを検出すると共に、前記複数の反射地点の高さから基準値を求め、ブレード22の高さが基準値に追従するようにブレード22の高さを調整するための信号を出力する。
(もっと読む)
地ならし機の動的安定化および制御
【課題】制御システムを含む地ならし機を提供すること。
【解決手段】機械は、地ならし機上で長手方向に取り付けられた第1および第2の衛星アンテナを備える。第3の衛星ナビゲーション・アンテナが、地ならし機の動作要素に取り付けられた柱に取り付けられている。一実施形態では、地ならし機はブルドーザであり、動作要素はブルドーザの刃である。機械はさらに、重力基準センサと、機械に取り付けられた複数のジャイロスコープとを備える。コンピュータ・プロセッサは、様々な構成部品から受信したセンサ・データに基づき制御信号を発生させる。開示されたシステムおよび方法により、望まない振動を発展させることなく、比較的速い速度で地ならし機の動的安定動作が可能になる。
(もっと読む)
自走式舗装機械の前輪駆動力増強装置
【課題】四輪駆動式の舗装機械において、前輪がスリップしない範囲で最大限の駆動力を得る圧力を前輪用油圧モータの常用圧力とし、状況に応じて、前輪用油圧モータの作動圧力をごく短い時間だけ常用圧力よりも高い圧力に設定して、特定の瞬間のみ、前輪の駆動力を増強できるようにする。
【解決手段】エンジンにより駆動される油圧ホンプ10と、油圧ポンプ10から吐出される圧油により前後の車輪をそれぞれ独立して駆動可能な油圧モータ16を備えたホイール式の自走式舗装機械において、油圧ポンプ10から前輪用油圧モータ16へ供給する圧油を、予め設定した常用圧力に制御する第1リリーフ弁31と、第1リリーフ弁31より高い設定の高圧力に制御する第2リリーフ弁32との複数のリリーフ弁の何れか一方を選択する切換弁33と圧力切換スイッチ34を備え、切換弁33は、特定の瞬間のみ、第2リリーフ弁32を選択して、前輪用油圧モータ16への圧油を高圧力にするように構成した。
(もっと読む)
統合された全地球的航法衛星システム・センサおよび慣性センサを有する自動ブレード制御システム
ブルドーザ・ブレードのブレード上昇およびブレード傾斜角を制御するための方法および装置が開示される。上昇測定値およびスロープ角測定値は、ブルドーザ・ブレード上に設置された全地球的航法衛星システム(GNSS)アンテナおよび慣性測定ユニットから受信された測定値から算出される。慣性測定ユニットは、3つの直交方向に配置された加速度計および3つの直交方向に配置されたレート・ジャイロを含む。これらの測定値は、ブレード上昇、ブレード垂直方向速度、ブレード傾斜角、およびブレード傾斜角速度の推定値を算出するためのアルゴリズムによって、処理される。次いで、これらの推定値は、ブレード上昇およびブレード傾斜角を制御するブルドーザ油圧システムを制御するための制御信号を供給する制御アルゴリズムへの入力として、供給される。 (もっと読む)
ブレード制御装置
【課題】簡易な構成であり、簡単な操作で、基準面に対するブレードの高さを制御することができるモータグレーダのブレード制御装置を提供する。
【解決手段】本発明のブレード制御装置1は、基準面B1の位置を感知するための基準面感知板21Aと、基準面感知板21Aとブレード9を連結するための連結手段22と、ある時刻tにおける測定ポイント26までの距離Dtnを検出するための距離センサ10と、距離センサ10で検出された距離Dtnに基づいて、ある時刻tにおける基準面B1に対するブレード9の現状高さHtnを演算し、ブレード9の現状高さHtnと予め設定されたブレード9の設定仕上がり高さHkとの差ΔHを演算し、ブレード9を現状高さHtnから設定仕上がり高さHkとするための変化量αを算出し、変化量αに基づいてブレード9を昇降させるためのコントローラ30と、油圧ユニット40と、シリンダ50と、を備える。
(もっと読む)
油圧ショベルのブレードの操作システム
【課題】油圧ショベルのブレードの操作システムに関し、ブレードの操作手段の設置場所の制約を排除し、且つ、操作性を向上させることができるようにする。
【解決手段】ブレードを駆動するブレード用油圧シリンダ7,ブレード用油圧シリンダ7に作動油を供給する油圧ポンプ21,スプール移動によりブレード用油圧シリンダ7に供給される作動油の流れを制御するブレード用コントロールバルブ22,ブレード用コントロールバルブ22にパイロット圧を作用させるパイロット回路CP,電気信号に基づきパイロット圧の制御を行うソレノイドパイロットバルブ26,27,ソレノイドパイロットバルブ26,27と電気配線で接続され、オペレータの操作に応じた電気信号を出力する電気スイッチ式の操作手段30,操作手段30からの電気信号に基づきソレノイドパイロットバルブ26,27を制御する制御手段40を備えた。
(もっと読む)
フローティング機能付きダブルチェックバルブ
【課題】ダブルチェックバルブが備えらた油圧シリンダにより駆動する作業装置が、作業面を平らに均す整地作業などに際して、フローティング機能を発揮できる。
【解決手段】フローティング機能付きダブルチェックバルブkは、油圧ポンプPと、作業装置を駆動せしめる油圧シリンダdと、切換時、油圧シリンダの起動、停止及び方向切換を制御するコントロールバルブaと、コントロールバルブaと油圧シリンダdとの間の流路を開閉し、外部よりの信号圧供給時に相互反対方向に切り換えられるように分割形成される一対のプランジャーh1・h2と、プランジャーh1・h2の切換によりチェック機能が解除される一対のチェックバルブb・cを備え、コントロールバルブaを中立状態に切り換え、且つ、作業装置のフローティング機能モードを選択する場合、油圧シリンダdのラージチェンバーd1とスモールチェンバーd2と相互連通させる。
(もっと読む)
油圧ショベルのフロント位置合わせ制御装置
【課題】フロント作業機で掘削や仕上げ,土羽打ちなどの作業を行なうに際し、かかる作業の開始時での位置合わせを容易にすることができるようにする。
【解決手段】表示部10には、1〜複数の目標作業面に関する情報が表示され、そのいずれかを作業面選択装置11によって選択できる。また、作業モード選択装置12により、選択された目標作業面での作業モードを選択できる。このように、目標作業面とその作業モードが選択され、操作レバー装置4a〜4fのいずれかが操作された状態でフロント位置合わせモード選択スイッチ9が操作されると、その操作期間、制御ユニット7がフロント位置合わせ制御動作を行ない、油圧アクチュエータ3a〜3fを動作させて、油圧ショベル1のバケットを選択された目標作業面に対して選択された作業モードに応じた目標位置に設定する。
(もっと読む)
作業位置測定装置
【課題】基準面の測定が精度よく行える作業位置測定装置を提供する。
【解決手段】回転レーザ装置は設置位置が既知とされ、少なくとも1つが傾いている少なくとも3つのファンビーム33a,33b,33cを射出するレーザ投光器を有し、受光センサ装置は前記ファンビームを受光する受光部と、前記受光センサ装置の傾きを検出する傾斜検出器と、前記受光部と予め決められた位置関係にあるGPS位置測定装置30と、前記回転レーザ装置の位置情報と前記GPS位置測定装置により検出された位置情報とから前記回転レーザ装置と前記受光センサ装置との距離を算出し、前記受光部が受光して形成する受光信号に基づき、前記回転レーザ装置を中心とする仰角を算出し、算出した仰角と距離とから前記受光センサ装置の高さを演算し、前記傾斜検出器からの検出結果に基づき演算された高さを補正する演算部とを有する。
(もっと読む)
建設機械制御装置
【課題】
1つの回転レーザ装置でレーザ光線を1回転させる間に複数の範囲でレベル設定が可能である様にし、複数の建設機械を1つの回転レーザ装置で制御可能とすると共に、傾斜面を含む整地作業を熟練度に左右されることなく、容易に而も能率よく行える建設機械制御装置を提供する。
【解決手段】
複数の建設機械2の整地作業をコントロールする建設機械制御システムに於いて、前記建設機械の整地器具5の位置制御用のレーザ基準面を変更可能に形成する回転レーザ装置1と、前記建設機械の位置を検知するGPS受信装置68,80と、前記建設機械に設けられレーザ基準面を検知し前記整地器具の位置を制御する器具制御手段73と、前記GPS受信装置の検知に基づく前記建設機械の位置に応じたレーザ基準面を形成する様に前記回転レーザ装置を制御する演算手段52とを有する。
(もっと読む)
1 - 20 / 28
[ Back to top ]