
Fターム[2F062DD34]の内容
機械的手段の使用による測定装置 (14,257) | 補正、補償、較正、調整 (452) | 方法 (71) | 補正値、補正率、補正曲線の設定 (69) | 電気的なもの (18)
Fターム[2F062DD34]に分類される特許
1 - 18 / 18
位置計測装置及び位置計測システム
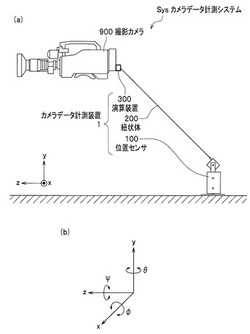
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置を素早く計測できる位置計測装置を提供する
【解決手段】カメラデータ計測装置1は、紐状体200の紐長変化量と紐状体の紐方向とを計測する位置センサ100と、両端が位置センサ100と撮影カメラ900とに接続された紐状体200と、紐長変化量及び紐方向に基づいて、撮影カメラ900のカメラデータを計測する演算装置300とを備え、演算装置300が、紐長初期値L0と位置センサ100で計測された紐長変化量ΔLとの和を紐方向での紐全長Lとして求め、求めた紐方向での紐全長Lを3次元方向成分に分解することで、撮影カメラ900の位置を示す3次元座標を算出する。
(もっと読む)
関節式プローブヘッド

【課題】高速走査を精度と共に達成するため、測定システムの運動質量、動的誤差を最小にする関節式プローブヘッドを提供する。
【解決手段】CMMは、その直線駆動に関する回転誤差(例えばピッチ,ロールおよびヨー)のための誤差マップが作成される。走査ヘッドもまた、回転誤差のための誤差マップが作成される。測定データは、CMMおよび走査ヘッドの組み合わされた回転誤差に関して実時間に同期して誤差補正される。この同期補正ためCMMおよび走査ヘッドの誤差マッピングデータを使用する。
(もっと読む)
載置台、形状測定装置、及び形状測定方法
【課題】予め算出した補正テーブルを変更することなく回転軸の位置補正を簡便に行うことができる、載置台、形状測定装置、及び形状測定方法を提供する。
【解決手段】被検物を載置する載置面が少なくとも1軸を中心として回転可能な載置部と、載置部を支持するベース部と、ベース部に固定されており、載置面の位置を規定する基準部と、を備える載置台である。
(もっと読む)
誤差分布算出方法、形状測定方法、および形状測定装置
【課題】複数の測定プローブを備えたフレーム部に起因する回転誤差を短時間且つ精度良く算出できる、誤差分布算出方法、形状測定方法、および形状測定装置を提供する。
【解決手段】被検物が載置される載置部と、被検物の形状を測定する複数の測定プローブの各々が所定のオフセットだけ離間して取り付けられた測定部と、測定部を互いに直交する2方向に前記載置部上を移動させる移動部と、を備えた形状測定装置における移動部による回転誤差分布を算出する誤差分布算出方法である。載置部上と所定の関係を持った位置に基準部材を配置する配置工程と、測定プローブの少なくとも2つが、基準部材の座標値をそれぞれ測定する測定工程と、各々の測定座標値の差分に基づいて移動部による回転誤差分布を算出する算出工程と、を備える。
(もっと読む)
三次元測定機の校正方法および校正治具
【課題】回転テーブル座標系の登録を効率よく行えるとともに高精度が確保できる三次元測定機の校正方法および校正治具を提供すること。
【解決手段】 回転テーブル50の座標系を登録するために、少なくとも3つの角度位置で回転テーブル50の表面の基準点の座標位置を測定する。測定には、接触部61として3つの同径の球体65を有し、支持部62として支柱64および基台63を有し、プローブ17の先端球17Aに対して3つの接点で同時に接触する校正治具60を用いる。測定手順として、回転テーブル50の表面に校正治具60を設置し、プローブ17を校正治具60に近接させ、プローブ17の先端球17Aが3つの球体65と同時に接触した状態での座標位置を読み取る。
(もっと読む)
組み込みアーム歪みセンサ
可搬型の関節アーム座標測定機(AACMM)が、手動で位置付けることが可能な関節アーム部と、第1の端部に装着された測定デバイスと、AACMMの構造的コンポーネントであって、軸方向を有する、構造的コンポーネントと、構造的コンポーネントに結合された、それぞれが受感軸を有する少なくとも3つの歪みゲージセンサであって、各歪みゲージセンサの受感軸が、軸方向に対してほぼ平行に向きを決められ、各歪みゲージセンサが、軸方向に垂直な横断面によってほぼ横切られ、アナログ歪みゲージ信号を生成し、歪みゲージセンサが、構造的コンポーネントと横断面の両方の上に存在する任意の点の曲げ歪みを判定するのに十分なデータを提供するように配置される、歪みゲージセンサと、位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。 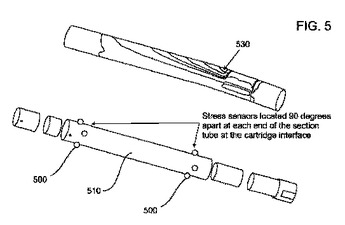 (もっと読む)
(もっと読む)
真円度測定機の測定精度検定方法
【課題】装置を大型化することなく、かつ回転台の回転軸心を基準とした任意の径位置でのコラムの移動軸心の平行度あるいはアームの移動軸心の直角度を検定する。
【解決手段】コラム31の傾斜量a0、真直マスタの第1の傾斜量a1及び真直マスタ61の第2の傾斜量a2を測定した後、検査者は、コラムの真直度軸心の平行度誤差a3により算出する。
(もっと読む)
重心測定システムおよび重心測定方法
【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
座標測定システムのための方法
本発明は、対象物の特徴形状を測定するための方法であって、少なくとも特徴形状の表象を、少なくとも特徴形状の表面測定を介して複数のデータ点を取得することによって対象物上で得ることを含む方法に関する。対象物の少なくとも特徴形状をほぼ複製するモデルが、表象に適合される。モデルは、共通点で連結される少なくとも2つの独立的に可変の部分を定義するパラメータを含む。適合させることは、少なくとも2つの独立的に可変の部分の少なくとも1つを変えることによってモデルの形態を変更することを含む。方法はまた、少なくとも特徴形状に関する情報を適合されたモデルから得ることも含む。 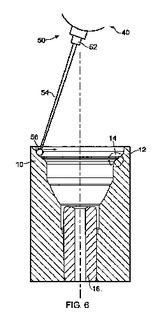 (もっと読む)
(もっと読む)
プローブの真直度測定方法
【課題】真直度測定用のセンサなどを別途用意しなくても、プローブの真直度を実際の使用環境の中で測定することができるプローブの真直度測定方法を提供する。
【解決手段】形状誤差が既知の測定基準面72を有する測定治具71を、測定基準面72がXYステージ2の移動方向に傾斜するように、XYステージ2の載置面2Aに載置する準備工程と、プローブのスタイラス14が測定基準面に一定圧で接触するように駆動用アクチュエータを制御しながらXYステージを所定距離移動させ、そのときのスタイラスの変位位置をプローブの変位検出器から測定する測定工程と、これによって得られたスタイラスの測定位置Zreal、計算によって得られるスタイラスの理論位置Znomおよび測定基準面の傾斜角度θから、スタイラスの真直誤差を求める演算工程と、を備える。
(もっと読む)
移動軸傾斜検出機構および測定装置
【課題】軸受け部分でアームを支持する移動機構において、アームの傾きを検出する移動軸傾斜検出機構の実現。
【解決手段】軸受け部3,5に摺動可能に保持された移動部材1の移動軸の傾斜を検出する移動軸傾斜検出機構であって、移動部材の摺動面の離れた2点に接触する2個の接触点11を有する接触部材12と、接触部材に設けられ、接触部材の鉛直方向からの変位角度を検出する傾斜計15と、を備える。
(もっと読む)
ベルマウス模型の3次元計測を用いてベルマウスの図面を製作する方法
【課題】ベルマウス模型の3次元計測を用いることによって、ベルマウス図面の精密な製作と同時に図面製作時間の短縮を可能にするベルマウス模型を用いたベルマウス図面製作方法を提供する。
【解決手段】実際のベルマウスの模型の3次元計測を用いることによって実際のベルマウスの図面を製作する方法であって、実際のベルマウスから縮尺したベルマウス模型を複数の断面に分割するステップと、縮尺したベルマウス模型の複数の断面を複数の曲線で表示するステップと、複数の曲線の座標を計測するステップと、計測された座標を利用してベルマウス模型の複数の断面図を形成するステップと、断面図を拡大することによって実際のベルマウスの図面を製作するステップとを含む方法が提供される。
(もっと読む)
表面形状測定装置
【課題】高速かつ高精度に倣い測定できる表面形状測定装置を提供する。
【解決手段】倣いベクトル指令部220から発せられた倣いベクトル指令に基づいて駆動機構の動作状態を推定して推定動作状態量を算出する動作推定部300と、動作推定部300にて算出された推定動作状態量に応じて駆動センサの検出値を補正演算する補正演算部400と、を備える。
動作推定部300は、倣いベクトル指令が発せられてから倣いプローブの移動位置に反映されるまでの信号伝達特性であるノミナルモデルが設定されたノミナルモデル設定部311を有し、補正演算部400は駆動中の駆動機構が変形することによって生じる測定誤差を補正する補正量を推定動作状態量に基づいて算出する補正量算出部420と、駆動センサおよび検出センサによる検出値と補正量算出部420にて算出された補正量とを合成して測定データとする測定データ合成部430と、を備える。
(もっと読む)
走査ヘッドの較正装置および方法
電動の関節式走査ヘッド(16)における角度測定スケールを、基準加工品(40;60;80)を用いて較正する方法が記載される。この方法は、走査ヘッド(16)に取り付けられた走査プローブ(28)などの表面検出デバイスを走査ヘッド(16)の少なくとも1軸(A1,A2)のまわりに回転させ、基準加工品(40;60;80)に対し異なる複数の角度方向に表面検出デバイスを移動させる工程を含む。次に、その異なる角度方向のそれぞれで、表面検出デバイスにより、基準加工品(40;60;80)の少なくとも1つの特性を測定する工程が実行される。そして、測定された基準加工品(40;60;80)の特性を用い、また付加的に既知または較正済みの基準加工品(40;60;80)の特性を用いて、走査ヘッドの少なくとも1つの測定スケールに対する誤差マップまたは関数を生成する。この方法は、走査ヘッド(16)を移動させるために、座標測定機械(14)などの座標位置決め機械の使用を含むことができる。基準加工品(40;60;80)は、単一の特徴部または配列された複数の特徴部(46;66)を含むことができる。 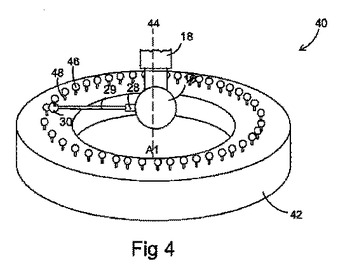 (もっと読む)
(もっと読む)
紙の表面粗さの評価方法及び評価装置
【課題】音叉型の水晶振動子を備えた触覚センサを用い、水晶振動子が紙表面に接触する前後のインピーダンス差△Rから、紙の表面粗さを評価する評価方法および評価装置を提供する。
【解決手段】紙の表面粗さを測定するために、紙の支持テーブルと窓付きセットシートを用いて、紙の露出部を小さく制限する。支持テーブル5と窓付きセットシート6はネオプレンゴム製振動ダンピング材であり、窓付きセットシート6には小さい窓(穴)があり、そこに露出する紙4の中心部分に触覚センサ1を一定荷重下で接触させる。紙4の上を窓付きセットシート6で覆うことで、紙面方向への伝播によるエネルギー損失が小さく制御されるので、触覚センサ1のインピーダンス差△Rは、紙の表面粗さのみに依存する値となり、△Rから紙の表面粗さの評価ができる。
(もっと読む)
加工品の表面点に接触するための方法および装置
【課題】加工品に接触する際にヒステリシス効果を最小限にする代替方法を提供する。
【解決手段】プローブヘッド基部56と触針22とを有するプローブヘッド26が提供され、前記触針22は、プローブヘッド基部56に対して移動可能である。触針22は、プローブヘッド基部56に対して画定された静止位置を有している。接触のために、触針22が表面点に画定された接触力で触れるまで、プローブヘッドが加工品に対して移動する。静止位置に対する触針22のヒステリシス作用を表す補正データ記録74が提供され、接触力が補正データ記録74を用いて定められる。
(もっと読む)
寸法測定用プローブ
工作機械のような座標位置決め機械上の物体の寸法を測定するプローブは、ワークピース接触用針20を有する。これは、針がワークピースに接触すると、出力を提供する歪ゲージ34を含むセンサー機構30を介して吊り下げられている。プロセッサー16は、歪ゲージの出力を処理し、トリガー信号を発生させる。プロセッサーは、3次元X、Y、Zでのワークピースへの接近の全ての可能性のある方向において等しい感度を保証するアルゴリズムまたは計算式あるいはルックアップテーブルにしたがってそのように行う。  (もっと読む)
(もっと読む)
関節プローブヘッドを持つ座標測定機の誤差補償方法
面検出デバイスを有した関節プローブヘッドを備えた座標位置決め装置を用いて行われる測定の誤差補償方法を提供する。前記面検出デバイスは測定の間前記関節プローブヘッドの少なくとも1つの軸回りに回転する。そして、前記補償は、前記装置の全体または部分の剛性を決定する工程と、特定の時点に前記関節プローブヘッドによって加えられる前記負荷に関連した1つまたはそれ以上の要因を決定する工程と、前記負荷によって生じる前記面検出デバイスにおける測定誤差を前記工程(a)および(b)を用いて決定する工程と、有する。
 (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]