
Fターム[2F062NN03]の内容
機械的手段の使用による測定装置 (14,257) | 測定の後処理 (180) | 測定値の利用 (173) | 制御 (60)
Fターム[2F062NN03]に分類される特許
1 - 20 / 60
工作機械
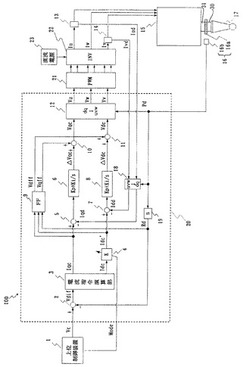
【課題】工作機械において、プローブの取り付けられた主軸を回転させてワークの計測を行う際の主軸の回転微振動を抑制し、計測精度を向上させる。
【解決手段】タッチプローブ17の取り付けられる主軸30と、主軸30を回転駆動するモータ15と、モータ15の回転角度位置を検出する回転角度位置検出器16と、制御装置20とを含み、制御装置20は、タッチプローブ17によってワークの測定を行う測定モード指令が入力された際に、d軸電流指令補正部4によってd軸電流指令値Idcに1より小さいd軸電流補正係数Kを乗じてd軸電流指令値Idcをd軸電流指令補正値Idc‘に低減する。
(もっと読む)
真円度測定装置及びその心ずれ量補正方法

【課題】測定物の母線と検出点とのずれ量である心ずれ量を算出して補正することにより、基準となる測定物の直径値とは異なる直径値を有する測定物であっても正確な直径値を算出する。
【解決手段】測定物の中心と回転の中心を一致させて、測定物を検出器に対して相対的に回転させ、測定物の真円度を測定する真円度測定装置において、直径値既知の基準測定物と前記検出器を前記基準測定物の母線と平行に相対的に移動して前記基準測定物の対向する2つの検出点でそれぞれ測定を行い、その測定差を検出する手段と、前記測定差に基づいて、前記基準測定物の母線と前記検出点とのずれ量である心ずれ量を算出する手段と、前記算出した心ずれ量に基づいて、任意の測定物の測定値を補正する手段と、を備えたことを特徴とする真円度測定装置を提供する。
(もっと読む)
形状測定装置及び方法
【課題】 プローブによって、垂直へ切り立った壁面や穴の内面であっても、安定して接触力を制御し、高速な形状計測を行うこと。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、プローブに加わる接触力の分力の大きさにより、被測定面と移動手段の方向の関係を推定する。その結果、被測定面と垂直に近い状態であると判断された方向の移動手段のみによって、プローブの接触力制御を行うこと。
(もっと読む)
3次元表面形状算出装置およびそれを用いた自動施工装置ならびにその方法
【課題】1回の走査で精度よく測定対象表面の3次元表面形状を算出することができる3次元表面形状算出装置を提供する。
【解決手段】3次元表面形状算出装置1は、センサ基台6と、先端に球形状を1方向に移動できる変位センサ2と、原点を定めた3次元空間で平面方程式算出点22を囲む3点の接触点に変位センサ2を接触させてセンサ基台6を移動させる演算部8とを備え、演算部8は、センサ球2の移動距離である変位信号200およびセンサ基台6の原点からの方向ならびに距離を用いて3点の球中心座標を求め、1点の球中心座標から他の2点の球中心座標へ向かう2つのベクトルの外積である法線ベクトルの単位ベクトルに球形状の半径を乗したベクトルを求め、このベクトルを球中心座標に加えて接触点の座標を求め、この接触点の座標が囲む平面方程式を算出する。
(もっと読む)
表示装置を用いた運転者頭部位置検出方法
【課題】自動車等の車両には、運転者が快適且つ安全に運転を行うための車内設備が備えられているが、これらの車内設備は運転者の身長又は体型によって最適な設定が異なるため、運転中の運転者が最適な設定を得るために車内設備を操作すると安全運転の妨げになるといった問題が生じる。
【解決手段】車両内に備えられた複数の点のうち、基準点を移動させて前記複数の点を重ね合わせることで運転者の頭部の位置を検出する頭部位置検出方法において、前記頭部位置検出方法はナビゲーション又はエアコン、オーディオ、車両状態等の少なくとも1つの情報の表示を行うディスプレイを有した表示装置を用いて行われ、前記表示装置によって検出された前記運転者の頭部の位置に基づいて車内設備の設定変更を行う。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
微細接触力調整機構を有する接触式計測装置
【課題】空圧と永久磁石による接触力調整において、微細な接触力を自動的にかつ正確に調整することが可能な微細接触力調整機構を有する接触式計測装置を提供する。
【解決手段】工作機械を制御する数値制御装置8から電空レギュレータ40へ電圧の微調整指令を行って、電空レギュレータの空気圧を微調整し、その時のプローブ1bの変位と接触力f1との関係を同時に取得しパーソナルコンピュータ11に備わった記憶装置に格納する。数値制御装置8による電空レギュレータ40の制御は、数値制御装置の記憶装置に格納されたデータから、電空レギュレータ40に指令する電圧に変換し、数値制御装置8に接続された電空レギュレータ40の圧力の調整を行う。電空レギュレータ40を用いることにより、レギュレータ36により絞られた1次降圧された圧縮空気を電空レギュレータ40において再度絞って2次降圧する。
(もっと読む)
三次元測定機
【課題】プローブや移動機構と、被測定物との衝突を判定するための適切な閾値を設定することができ、プローブや移動機構と、被測定物とが衝突したか否かを迅速に判定することができる三次元測定機の提供。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ21と、プローブ21を移動させる移動機構22と、モーションコントローラ3とを備える。モーションコントローラ3は、移動機構22にてプローブ21を移動させるための電流値を検出する電流値検出部33と、電流値検出部33にて検出される電流値と、移動機構22にてプローブ21を移動させる速度の目標値に応じて設定される閾値とに基づいて、移動機構22にかかる負荷の状態を判定する負荷判定部34とを備え、速度の目標値と、閾値との関係は比例関係である。
(もっと読む)
三次元測定機
【課題】簡素な処理でプローブや移動機構と、被測定物とが衝突したか否かを迅速に判定することができる三次元測定機の提供。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ21と、プローブ21を移動させる移動機構22と、モーションコントローラ3とを備える。モーションコントローラ3は、移動機構22にてプローブ21を移動させるための電流値を検出する電流値検出部33と、プローブ21にて被測定物を測定する測定モードと、被測定物を測定することなくプローブ21を移動させる移動モードとを識別するモード識別部34と、電流値検出部33にて検出される電流値と、モード識別部34による識別結果に応じて設定される閾値とに基づいて、移動機構22にかかる負荷の状態を判定する負荷判定部35とを備える。
(もっと読む)
仮想表面によって測定過程を制御する方法
本発明は、測定対象(12)を計測する座標測定機(46)の測定過程を制御する方法(10)であって、前記座標測定機(46)が制御装置(64)と探触ピン(18)を備えたプローブ(60)とを有し、前記探触ピン(18)と前記測定対象(12)の表面(14)との間の相対運動が前記制御装置(64)によって制御されるものに関する。さらに、前記表面(14)は測定対象表面(13)に一致した少なくとも1つの実際部分(24)と少なくとも1つの仮想部分(26)とを有する。本発明はさらに、当該座標測定機とコンピュータプログラムとに関する。
(もっと読む)
歯車測定方法
【課題】タッチ式プローブを用いて多点式連続測定ができ、従来の方法に比べて測定時間を短縮することができる歯車測定方法を提供する。
【解決手段】例えば、タッチ式プローブの測定子を、測定子の移動及びワーク(歯車)の回転を制御しワークWの理想歯形ライン、又は、演算によって求められた歯形ラインに沿って移動させるためのベース動作を行なうことに加えて、前記ベース動作中に、測定子をワークの歯面に当接させてタッチ式プローブからの第1信号(ON信号又はOFF信号)を受け取った後、測定子がワークの歯面に対し離間する方向へタッチ式プローブを移動させてタッチ式プローブからの第2信号(OFF信号又はON信号)を受け取るためのオシレーション動作を連続して行なう。
(もっと読む)
眼鏡枠形状測定装置
【課題】高カーブフレームのレンズ枠の形状を精度良く測定し、高カーブフレームの測定時に測定子がレンズ枠の溝から外れ難くする。
【解決手段】針状の先端形状を持つ測定子281の移動位置を検知してレンズ枠の動径方向(XY方向)及び動径方向に垂直な方向(Z方向)の三次元形状を測定する眼鏡枠形状測定装置は、測定子281が取り付けられた測定子軸282を持ち、測定子軸282を測定子281の先端方向に傾斜可能に保持すると共に、測定子軸282をZ方向に移動可能に保持する測定子保持ユニットと、Z移動手段と、測定子のZ位置を検知するZ位置検知手段と、Z移動ユニットの駆動を制御する制御手段と、測定子保持ユニットのZ方向の位置情報及びZ位置検知手段の検知情報に基づいてレンズ枠の動径形状に対応するZ方向の形状を求める演算手段とを備える。
(もっと読む)
眼鏡枠形状測定装置
【課題】精度良くレンズ枠の形状を測定する。
【解決手段】針状の測定子281の移動位置を検知してレンズ枠の動径方向(XY方向)及び動径方向に垂直な方向(Z方向)の三次元形状を測定する眼鏡枠形状測定装置は、測定子281が取り付けられた測定子軸を持つ測定子保持ユニットであって、測定子281の先端方向に測定子軸を移動可能に保持し、測定子保持ユニットと、XY移動手段と、測定子の先端のXY方向を変える回転手段と、測定子のXY位置検知手段と、XY移動手段及び回転手段の駆動を制御する制御手段と、測定子保持ユニットのXY方向の位置情報、回転手段の回転情報及びXY位置検知手段の検知情報に基づいてレンズ枠FWの動径情報を求める演算手段とを備え、制御手段はレンズ枠FWの測定途中では、レンズ枠FWの測定済みの動径情報に基づいて測定子保持ユニットを移動させるXY位置を決定してXY移動手段の駆動を制御する。
(もっと読む)
三次元測定機
【課題】被測定物の大きさに拘わらず、プローブの接触を確認しながら測定を実行することができる三次元測定機を提供する。
【解決手段】被測定物を載置するテーブルとプローブとを三次元方向へ相対移動させる相対移動機構13と、相対移動機構の駆動を指令する携帯可能な操作盤30と、操作盤からの指令に基づき相対移動機構を駆動させるとともに、プローブからの信号を取り込んで被測定物の形状を求める制御装置40とを備える。プローブの近傍にはカメラ20が取り付けられ、操作盤30には、表示部34と、カメラによって撮像された画像を表示部に表示する制御部38とが設けられている。
(もっと読む)
形状測定装置
【課題】被測定面に段差部等の急激な形状変化のある光学素子の形状測定を高精度で行う。
【解決手段】3次元方向に移動する測定軸15は、移動ステージ21を介して、プローブ1を保持するハウジング10を支持する。被測定物24の段差部の近傍では、移動ステージ21をXYステージ28による測定軸15の走査方向と逆向きに駆動することで、プローブ1の走査速度を低減する。段差部を過ぎた後は、移動ステージ21を走査方向へ移動させて、測定軸15上の元の位置へもどして、測定を続行する。段差部におけるプローブ1の飛び跳ねを防ぎ、高精度な形状測定を可能にする。
(もっと読む)
形状測定装置
【課題】測定対象点に測定子を確実に接触させて被測定物の形状を測定することができる形状測定装置の提供。
【解決手段】三次元測定機1は、被測定物を測定するための球状の測定子を有するプローブ21と、プローブ21を保持するとともに、プローブ21を移動させる移動機構22と、移動機構22を制御するモーションコントローラ3とを備える。モーションコントローラ3は、測定子の中心位置と、測定子の半径と、測定子の振れ量とに基づいて、被測定物の表面と、測定子との接触点の位置を算出して取得する接触点取得部33と、接触点取得部33にて取得される接触点の位置に基づいて、移動機構22にてプローブ21を移動させるための位置指令値を算出する移動指令部31とを備える。
(もっと読む)
形状測定装置
【課題】容易にワークの形状測定を行うことのできる形状測定装置の提供。
【解決手段】NC加工装置1のCAD/CAM装置51は、加工情報中の測定点における加工ツール25の姿勢ベクトルが、CAD/CAMデータ中の当該点における法線ベクトルと一致した場合、加工情報中の加工ツール25のワークWに対する姿勢を、そのまま使用して測定用NCデータを形成する。加工ツール25の姿勢ベクトルがワークWの法線ベクトルと一致しない測定点があった場合、測定精度に基づいてプローブの測定姿勢に精度順位を設け、各測定点において、精度順位が高いものから優先的にワークWに対するプローブの測定姿勢を設定して測定用NCデータを形成する。優先順位が同等であるプローブの複数の測定姿勢については、各測定姿勢に到達するまでに必要とするマシニングセンター2の駆動軸27、28の移動量が少ないものを、プローブの測定姿勢データとして設定する。
(もっと読む)
ロータリキルンにおける回転体の周長計測装置
【課題】ロータリキルンを停止させること無くタイヤ等回転体の外周長さを検出することができる計測装置を提供する。
【解決手段】ロータリキルンにおける回転体の周長を測定する装置であって、ストライカ16と近接センサ14によりタイヤ62の回転数を検出する回転検出部12と、タイヤ62の外周に転がり接触する周長測定用ローラ22と周長測定用ローラ22の回転角度を検出する回転角度検出器24とを有する周長測定部20と、回転検出部12と周長測定部20の稼動を制御し、回転検出部12によって検出された回転数と周長測定部20によって検出された回転角度、および周長測定用ローラ22の周長に基づいて、タイヤ62の周長および外径、または周長および外径のいずれか一方を算出する演算部を備えた制御部40とを有することを特徴とする。
(もっと読む)
三次元測定装置及び該装置を用いた測定方法
【課題】測定精度を低下させることなく測定時間を短縮した三次元測定装置及び該測定装置を用いた測定方法を提供する。
【解決手段】本発明の三次元測定装置1は、被測定物を撮像する撮像手段と、撮像結果から被測定物に付着した異物3の有無を検知する異物検知手段と、被測定物に測定子161を接触させて測定する測定手段と、検知された異物3を低減・除去する異物除去手段と、を備えている。そして、異物3検知時には測定手段での測定前に異物除去手段で異物3を除去・低減するものである。これにより、異物3の検知時間を短縮できて、全体の測定時間を短縮することができ、且つ測定子161を用いて測定するため被測定物を正確に測定することができる。
(もっと読む)
画像プローブの校正方法および形状測定機
【課題】画像プローブの校正方法を提供すること。
【解決手段】画像プローブ3の撮像方向を垂直にした状態で画像プローブ3および各測定子611A,611Bによりそれぞれ校正ゲージ62を測定し、画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係を求める。次に、一方の測定子611A,611Bにより基準球63を測定し、基準球63の位置を登録する。続いて、画像プローブ3の撮像方向を傾斜させた後、各測定子611A,611Bで基準球63を測定し、該測定結果と登録した基準球63の位置とから測定機1上の各測定子611A,611Bの位置を求める。画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係は既に取得しているので、求めた測定機1上の各測定子611A,611Bの位置から画像プローブ3の光軸周りの回転角度および画像プローブ3の位置を校正できる。
(もっと読む)
1 - 20 / 60
[ Back to top ]