
Fターム[2F063BA29]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | 生体 (231)
Fターム[2F063BA29]に分類される特許
221 - 231 / 231
着座センサ

【課題】 座席シートへの着座位置(状態)に応じて異なるレベルのセンス信号を周辺機器に供給できるように改良されたフィルム状の着座センサを提供することを目的とする。
【解決手段】 本発明の着座センサによれば、複数のセンサセルA乃至Dが着座位置によっては不作動のセンサセルが発生するように分布配置され、センサ回路配線3、4、22及び複数のセンサセルA乃至Dが入出力端子部T1−T2間にセンサ回路を構成するように相互接続され、このセンサ回路に正常着座又は異常着座を含む着座位置の違いに応じて前記出力端子部T2の出力レベルが異なるように作用する複数のレベル設定素子AR、AR1、CR、CR1が接続されることによって着座位置に応じて異なるセンス信号レベルを周辺機器へ供給できるようにされている。
(もっと読む)
歪モニタリングシステム及び装置
脊椎融合、グルコースレベル、脊椎負荷及び心拍のような生物学的状態のインジケータとして歪をモニタリングするためのシステムについて開示している。そのシステムは、櫛歯型コンデンサセンサ、RF送信器及び関連アンテナを有し、それらの全ては、サイズが超小型であり、人間又は動物のような生物学的ホストにおいてインプラントされることができる。誘導結合電源はまた、化学バッテリのインプラントの必要性を回避するように用いられる。可搬型RF ID型受信器のような外付け受信装置が、インプラントされたセンサ、送信器及び誘導結合電源の位置に近接して位置付けられるとき、電力はセンサ及び送信器に供給され、データはセンサから送信される。インプラントされたセンサ、送信器及び誘導結合電源は、必要に応じて、恒久的に所定位置に保たれる、又は取り外されることが可能である。 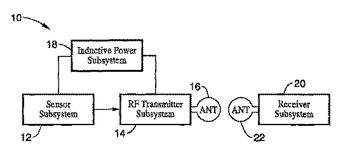 (もっと読む)
(もっと読む)
姿勢並びに関節角度検出装置及び方法

【課題】 地磁気や外部磁界の影響を受けないで発信出力を受信することができる。
【解決手段】 基準部位に取付けられ交番電流により交番磁束を発生させる送信コイル3と、動作部位に取付けられ上記交番磁束を検知する受信コイル4と、上記交番電流を発生させる発振器1の発振波形と上記交番磁束を検知する受信コイル4の受信波形との同期検波を行う同期検波回路6とを有する。また、送信コイル3に対し異なる動作部位に複数の受信コイル4を備え、この複数の受信コイル4を切り替えるマルチプレクサ10を備える。
(もっと読む)
静電容量センサ
【課題】 容量変化率を大きくして、検出精度または感度の向上を図る。
【解決手段】 静電容量センサ10であって、行配線14に接続された検出行配線34と、 列配線17に接続された検出列配線37と、検出行配線34上を被覆する第1の誘電体層15と、検出列配線37上を被覆する第2の誘電体層16と、が設けられ、第1の誘電体層15の比誘電率よりも第2の誘電体層16の比誘電率のほうが大きく設定されてなる。
(もっと読む)
指紋認識装置
【課題】指紋センサに指の腹が接触し、さらに接地電極に指が確実に接触するようにして、常に理想的な状態で高精度の指紋認識を可能とすること。
【解決手段】指紋を検出する指紋センサ10と、指紋検出時に対向電極となる指を接地電位とするための接地電極3と、前記指紋センサ10と前記接地電極3が取り付けられる絶縁性の基板1とを備え、指紋の検出を行うとき、前記基板1を指紋を検出する指と他の指とで挟む構造とする。
(もっと読む)
挟み込み防止システム
並進する装置によって物体が挟み込みされるのを防止するための挟み込み防止システムは、並進する装置に隣接して配置されたキャパシタンスセンサを含む。このセンサは、或る分離距離だけ隔てられた第1及び第2の可撓性導体を有する。この導体は、分離距離に依存するキャパシタンスを有する。センサは、これらの導体の間に介在する圧縮性誘電体要素を有する。導体のキャパシタンスは、第1の物体がセンサに接触するのに応じて誘電体要素が圧縮される結果として、分離距離が変化するのに応じて変化する。導体のキャパシタンスは、第2の導電性物体が少なくとも一方の導体に接近するのに応じて変化する。コントローラは、並進する装置が第1の物体又は第2の導電性物体のいずれかを挟み込みするのを防止するために、並進する装置を導体のキャパシタンスに応じて制御する。 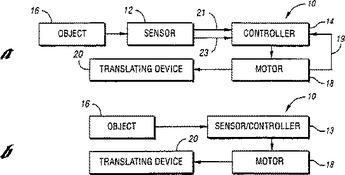 (もっと読む)
(もっと読む)
有機電界効果トランジスタを備える力センサ、並びに該力センサを用いた圧力センサ、位置センサ、および指紋センサ
本発明は、基板(1、11)に設けられた有機電界効果トランジスタ(10)を備える力センサに関するものである。本発明によれば、該トランジスタへの機械的な作用力は、ソース−ドレイン電圧またはソース−ドレイン電流(ID)の対応する変化を引き起こす。これにより、該変化は、印加される力に対する測定変数(V測定、I測定)として、それぞれ検出される。また、本発明は、このタイプの力センサを用いる膜ベースの圧力センサ、このタイプの力センサを複数用いる一次元または二次元の位置センサ、並びにこのタイプの力センサを複数用いる指紋センサに関する。  (もっと読む)
(もっと読む)
人の動作を決定する方法及び装置
人によって装着されたセンサが人の動作を測定する。本発明によれば、向きの動作は、静止基準点からセンサに関連付けられた基準点に導く回転によって表現されず、静止基準点の軸又は平面と装着者に関連付けられた軸とを分離する角度によって表現され、それによって、彼/彼女の動作及び彼/彼女の活動をより良好に特定することを可能にする。本発明を患者のモニタリングに適用し得る。
 (もっと読む)
(もっと読む)
電磁トラッカにおける歪み低減のためのシステム及び方法
【課題】本発明は、電磁(EM)トラッカにおける歪みの解析及び低減。
【解決手段】EMトラッカは、レシーバ及びトランスミッタとしてコイルを用いることができる。本システム(100)の特定の実施形態は、器具(110)の追跡動作を解析する追跡解析ユニット(120)と、器具(110)の追跡動作を補正する追跡修正ユニット(130)とを含む。このような器具(110)は、例えばドリル、カテーテル、外科用メス又はスコープなどの医療器具である。これらの器具及びその周囲環境は、金属構成要素を含むことが多い。レシーバ又はトランスミッタのようなEMナビゲーション装置を器具(110)上に配置することは、追跡及び追跡精度に影響する歪みを磁場に引き起こす可能性がある。医療用途以外の使用が予測され、また超音波又は慣性位置のようなEM追跡システム以外の追跡システムも予測される。
(もっと読む)
消化器系の軸方向力を検出する装置
プローブに印加される変形と力を測定する装置と方法を提供する。系は機械系、物理系または、例えば身体中空系等の生物系でもよい。本装置は、細長い弾性プローブと、プローブに取り付けられ、または収容された導電性媒体と、導電性媒体によって電気的に接続され、プローブに取り付けられた2以上の電極とを含み、本装置は更に、いくつかの電極の少なくとも2個の間の電位差等の電気的パラメータを測定する手段を含み、測定される電気的パラメータは細長いプローブの少なくとも長手方向のプローブの変形を示す。プローブの電気的パラメータと力の関係の事前較正からプローブに印加される力を決定すればよい。  (もっと読む)
(もっと読む)
物体の形状を決定する方法及びそのような方法のためのシステム
処理手段(12)及び静電感知装置(20)を使用するシステムが記載されている。該システムは、所定形状の物体(42,70)及び感知された静電的測定値(40)に対する静電的計算(44,46)の反復(56)から未知の物体の形状が計算されるような方法を実行する。上記所定の物体形状(70)は未知の物体形状(72)に向かって該物体形状が決定される(60,74)まで当該方法の各反復において変形される。該形状の変形は、上記所定形状に供給された電荷分布に依存するような静電電位の零等高線を計算することに基づくものである。  (もっと読む)
(もっと読む)
221 - 231 / 231
[ Back to top ]