
Fターム[2F063BA29]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | 生体 (231)
Fターム[2F063BA29]に分類される特許
121 - 140 / 231
荷重検出装置
【課題】バネから直接に荷重や変位情報を簡単に取り出す検出方法とその装置を提供する。
【解決手段】バネ1が引張,圧縮の変形をする時にそれ自体の微小な抵抗変化を電圧変化,あるいは抵抗変化そのものを検出する。電圧変化として測定する場合,平衡回路として4個の抵抗を組んで成るホイートストンブリッジ回路のアクティブ抵抗3に並列,あるいは直列にバネに取り付けたリード線2を介してバネを抵抗体として導入して検出する。バネ以外の板や棒材の変形についても同じである。
(もっと読む)
形状検出装置

【課題】測定物の測定対象面の形状を高感度で検出できる形状検出装置を提供する。
【解決手段】形状検出装置1は、人間の指紋の形状を検出するものあり、指が置かれる位置に設けられた電極アレイ11と、人が立つ位置に設けられた電極12と、この電極12に接続された交流の信号発生器13と、電極アレイ11に接続された検出器アレイ14とを備える。
(もっと読む)
容量センサー内蔵の自動車シートに着座した乗員の形態を決定する方法
【課題】いくつかの容量センサーを内蔵した自動車シートに着座した乗員の形態をより詳細に決定することができるように、容量センサーの前記構造を改良することにある。
【解決手段】シートに内蔵された複数の容量センサーからの出力を収集する工程と、各容量センサーに対して、前記センサーから標的物が離れている距離を示す第1の値、及び、前記標的物によって覆われた前記センサーの表面を示す第2の値を決定する工程と、前記標的物によって覆われた前記センサーの表面を示す前記第2の値に、前記センサーから前記標的物が離れている距離を示しかつ前記第2の値に対応する前記第1の値に基づいた各重み付けを、適用する工程と、重み付けされた第2の値の収集に基づいて前記標的物の形態を決定する工程とを含む。
(もっと読む)
ヘッドモーショントラッカ装置及びその使用方法
【課題】 交流磁気方式のHMT、光学方式のHMTにおいて測定不可のときに、移動体に設定された基準方向に対する頭部角度を算出することができるヘッドモーショントラッカ装置及びその使用方法を提供する。
【解決手段】 磁気方式又は光学方式モーショントラッカにより搭乗者の頭部角度を含む第一相対頭部情報を算出する主頭部情報算出部とを備えた移動体センサと、移動体センサに基づいて移動体の動きを表す絶対移動体情報を算出する絶対移動体情報算出部と、頭部センサと、頭部センサの出力信号に基づいて移動体と頭部との動きとを合成した絶対頭部情報を算出する絶対頭部情報算出部と、絶対移動体情報と絶対頭部情報とに基づいて第二相対頭部情報を算出する副頭部情報算出部と、主頭部情報算出部による第一相対頭部情報の算出が不適当な領域において副頭部情報算出部により第二相対頭部情報を算出する切替部とを備える。
(もっと読む)
センサーにおけるターゲットのローカライゼーション向上方法
【課題】容量センサで標的の位置測定を行う際に、角度要素、面積要素、温度要素の補正を行い精度を向上させる。
【解決手段】複数の電極を含有する容量センサーの出力を収集する工程と、前記出力を組み合わせ、前記センサーから標的物が離れている距離を表すシグナルを得る工程とを有する、センサーにおける標的物の位置を測定する方法に関する。複数データから角度要素、面積要素を同定し補正をかける。また、別途用意した温度補正テーブルを用いtw温度補正をかける。
(もっと読む)
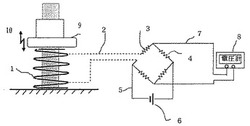
少なくとも1個の磁性体の非接触の定義された運動のための構造
本発明は、少なくとも一次元で運動自在な少なくとも1個の磁性体(20)の非接触の定義された運動のための構造に関する。位置決めや方向決めだけでなくエネルギーの発生や伝達のための汎用用途のこの種の構造であって、占有容積を減少させた単純な構造は、定義された様に動く少なくとも1個の永久磁石(13)の一次磁界内に、所定の磁気モーメントを有する磁性体(20)を配置することで達成できる。一次磁界と位置合わせされた二次磁界が磁性体(20)から延在している。磁性体(20)のそれぞれの位置における二次磁界を記録するために、少なくとも1個の磁界センサ(17)が設けられている。 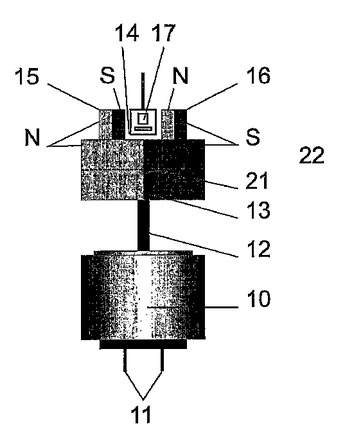 (もっと読む)
(もっと読む)
磁気源の位置を突き止める方法
【課題】磁気源の位置を突き止める方法を提供する。
【解決手段】磁気源の位置を突き止める方法が、磁気源により生じた磁界を測定するステップと、かかる測定に基づいて空間中の多数の点における磁界の三次元磁束密度の成分を求めるステップとを含む。この方法は、磁気源の位置を推定するステップと、推定位置に基づいて空間中の多数の点における理論的三次元磁束密度の成分を求めるステップとを更に有する。次に、測定した成分とこれらに対応した理論的三次元磁束密度成分の差を最小限に抑えることにより、磁気源の位置を突き止めることができる。
(もっと読む)
静電容量式位置検出装置
【課題】静電容量式位置検出装置の小型化を実現する。
【解決手段】検知電極2は、紙面左側Lの検知電極2Lと紙面右方向Rの検知電極2Rとを備えて構成されている。検知電極2Lは、右方向Rが櫛歯状に形成されており、櫛歯は右方向Rにいくに従って次第に細くなる。一方の検知電極2Rは、左側Lが櫛歯状に形成されており、櫛歯は左側Lにいくに従って次第に細くなる。検知電極2L及び検知電極2Rは、互いの櫛歯の隙間を介するよう歯合するように配されており、互いの電圧が独立するようにわずかな隙間が介されている。検知電極2L、2Rは、それぞれ静電容量検知回路に接続されている。
(もっと読む)
乗員検知システム
【課題】シートの濡れなどの外乱要因による誤検知が抑えられた乗員検知システムを低コストで提供すること。
【解決手段】本発明の乗員検知システムは、車両のシートの着席部に配設されたアンテナ電極と、アンテナ電極および車両に接続され、アンテナ電極に負荷電流を付与して微弱電界を発生させるとともにアンテナ電極に流れる電位電流を検出する電源手段と、を有する乗員検知システムであって、負荷電流と電位電流からインピーダンスおよび位相差あるいはアドミタンスを算出し、算出されたインピーダンスおよび位相差あるいはアドミタンスにもとづいてシート上の乗員の検知を行うことを特徴とする。本発明の乗員検知システムは、低コストで高い精度で着席者を検知できる乗員検知システムとなっている。
(もっと読む)
磁気式位置姿勢センサを用いた手指用モーションキャプチャ装置
【課題】本発明は、手指の繊細な動きを記録・再現するための磁気式位置姿勢センサを用いた手指用モーションキャプチャ装置を提供することを目的とする。
【解決手段】磁気式三次元位置姿勢システム(Liberty 16 system)は、1個のトランスミッタ(Transmitter)と16個のセンサ(sensors)で構成されており、トランスミッタに対するセンサの相対的な位置(X,Y,Z)および角度(Az,El,Ro)を計測することができる。それぞれのセンサは指に装着し易いようにモールドしており、1本の指に3個のセンサを装着できる。片手あたり手掌部の1個を加え計16個のセンサで手指のモーションキャプチャ(MoCap)を構成しており、あらゆる手の動きを計測することができる。また、トランスミッタと手掌部のセンサを固定するグローブは伸縮性のある面ファスナーを巻きつけて装着し、その他のセンサは伸縮性に富むテーピングを用いて装着する構造である。
(もっと読む)
磁気マッピング装置ならびにその位置決め方法
【課題】簡単、かつ、短時間で正規の取付位置に位置決めすることができる磁気マッピング装置並びにその位置決め方法を提供する。
【解決手段】 移動ステージ31を備えた磁気マッピング装置であって、レーザー光照射方向前方で磁気マッピング装置の設置の際の基準となる基準線L上の位置に取り付けられたヘッドアップディスプレイ2と、このヘッドアップディスプレイ2の前方で基準線Lの延長上に設置されたターゲットボード4とを含み、ヘッドアップディスプレイ2は基準線L上にシンボルマークを表示させ、ターゲットボードは基準線の延長上にターゲットマークを表示させ、レーザー照射器5から照射させたレーザー光をシンボルマークとターゲットマークとに合致するように移動ステージを設置する。
(もっと読む)
電子機器
【課題】本発明は、接触型センサ内蔵半導体素子と配線基板との接続部が保護された半導体装置が組み込まれた電子機器を提供することを課題とする。
【解決手段】電子機器に接触型センサ内蔵半導体装置が内蔵される。接触型センサ内蔵半導体装置は、回路形成面に形成されたセンサ領域1bとセンサ領域1b以外の領域に設けられた接続用電極1cとを有する接触型センサ内蔵半導体素子1と、端面が回路形成面上に位置するように半導体素子1の接続用電極1cに接続された配線基板2と、配線基板2の端部から回路形成面までの部分を覆うように設けられた保護樹脂部7とを有する。センサ領域1bは筐体3から外部に露出している。
(もっと読む)
接触型センサ内蔵半導体装置
【課題】本発明は、半導体素子と配線基板との接続部が保護された接触型センサ内蔵半導体装置を提供することを課題とする。
【解決手段】接触型センサ内蔵半導体装置は、回路形成面に形成されたセンサ領域1bと、センサ領域1b以外の領域に設けられた接続用電極1cとを有する接触型センサ内蔵半導体素子1と、端面が回路形成面上に位置するように、半導体素子1の接続用電極1cに接続された配線基板12Aとを有する。半導体素子1の回路形成面上に位置する配線基板12Aの端面6aは傾斜面である。
(もっと読む)
表面変位測定方法及びこれに用いる表面変位測定装置
【課題】 介在物の表面に簡易な部材を設けた状態で、介在物表面の変位より正確に測定する表面変位測定方法及び表面変位測定装置を提供すること。
【解決手段】 被検出体52及びこの被検出体52との離隔距離を測定可能なセンサ55を介在物を介して配置し、介在物の一側面の表面変位を測定する。一側面に被検出体52又はセンサ55を複数個適宜測定位置線に沿わせると共に互いに離隔させて設ける。
また、被検出体52及びセンサ55が検出方向性を有し、これら両者の方向を一致させて相対変位させるように、一側面に設けた被検出体52又はセンサ55の変位方向を制限するようにしても良い。
(もっと読む)
プリント回路を有するコア上の小型コイル
【課題】小型の多軸型コイルを製造する方法および当該方法によって製造された装置を提供する。
【解決手段】コイルアセンブリを製造する方法は、コア上にプリント回路配線を配設するステップを含んでいる。この配線は、コイルアセンブリが取り付けられるべきベース上の導電性接続部に連結するための端子を含んでいる。二つまたはそれ以上のワイヤーは、二つまたはそれ以上のコイルを画定するように、コアの周囲に、それぞれ異なる方向に巻き付けられる。ワイヤーの端部は、プリント回路配線を介して、ワイヤーを端子に接続するように、プリント回路配線に連結される。
(もっと読む)
高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システム
【課題】振幅に加え位相も計測対象として位置精度を向上させる高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システムを提供する。
【解決手段】励磁コイルと、この励磁コイルと対向する複数の検出コイルと、励磁コイルと検出コイルとの間に配置されるLC共振型磁気マーカと、励磁コイルはLC共振型磁気マーカの共振周波数に同調させた交流磁界を発生させ、LC共振型磁気マーカからの誘導磁界を複数の検出コイルの各検出コイルで計測する手段と、LC共振型磁気マーカをセットした状態での検出コイルによる第1の誘起電圧を計測する手段と、LC共振型磁気マーカをセットしない状態での検出コイルによる第2の誘起電圧を計測する手段と、第1の誘起電圧と第2の誘起電圧の位相差θを求める手段と、この位相差に基づいてLC共振型磁気マーカの寄与電圧を求める手段とを具備する。
(もっと読む)
反転磁界システムでの金属不感受性
【課題】目標物の追跡方法および追跡システムを提供する。
【解決手段】目標物を追跡する方法は、位置を示す磁界を送信するための送信器を目標物に固定する過程と、目標物によって引き起こされた位置を示す磁界のひずみのマップを提供する過程と、を含む。目標物から送信された歪んだ磁界が検出される。歪んだ磁界は、目標物によって引き起こされた歪にさらされた位置を示す磁界を含んでいる。検出された歪んだ磁界に基づく目標物の推定された座標が、求められる。推定された座標およびマップが、補正された座標を計算するために用いられる。
(もっと読む)
超小型絶対位置センサを用いたハンドインターフェースグローブ及びこれを用いたハンドインターフェースシステム
【課題】超小型絶対位置センサを用いて指関節の絶対位置を測定した信号を用いて仮想空間の仮想ハンドモデルを制御し仮想空間の客体と相互作用できるようにして現実空間の使用者の手動きを精密で正確に仮想空間の仮想のハンドモデルの動きと自然に一致されるように現実空間と一致度の高い自然な手の動きおよび視覚的一致感を支援するグローブ及びこれを使用したシステムを提供する。
【解決手段】指関節の絶対位置を測定する超小型絶対位置センサを用いて指関節の微素変位を測定し、測定された指関節の動きを用いて仮想のハンドモデルの動きを制御し仮想環境の客体と相互作用して、使用者の体形の大きさによって異なる変化距離の補正を簡単な2つの動作にてできるようにして仮想の製品品評などの高品質の仮想現実技術に接し、実際と類似に製品の品評過程を模擬して製品の欠陥と誤謬を事前に検出でき、全体的に製品の生産過程及び設計過程を短縮させる効果がある。
(もっと読む)
表面形状認識用センサ、その製造方法
【課題】表面引っ掻きに対する強度が高められた表面形状認識用センサを提供する
【解決手段】本発明の表面形状認識用センサは、半導体基板上に電源供給配線を有する下地回路層と、下地回路層上に下層絶縁膜と、下層絶縁膜上にセンサ電極及びアース下部電極と、センサ電極及びアース下部電極を覆うパシベーション膜と、表面が露出するようにパシベーション膜に埋め込まれたアース上部電極と、アース下部電極とアース上部電極とを電気的に接続する接続電極とを備え、アース下部電極は、平面的に見たときに電源供給配線に重ならないように配置され、アース上部電極は、表面が平坦であることを特徴とする。
(もっと読む)
車両用衝突検知装置
【課題】簡単な構成で静電容量式のセンサ部における配線の断線故障による誤検知を防止して確実に衝突の発生を検知可能な車両用衝突検知装置を提供する。
【解決手段】車両バンパに歩行者等が衝突すると、センサ部11において対向電極12間の距離が一時的に縮小して静電容量が増大し、これによりLC直列共振回路における共振周波数が低い側にシフトする。一方、センサ部11のサイドメンバ側電極12bと駆動回路部16とを接続する配線14に断線故障が生じると、センサ部11が駆動回路部16から遮断され、LC直列共振回路における静電容量が減少して共振周波数が高い側にシフトする。よって、衝突発生時と配線14の断線故障時とで駆動回路部16と配線14との接続点16dにおける電圧変化の態様が異なるため、これらを電圧検出値によって容易に区別可能である。
(もっと読む)
121 - 140 / 231
[ Back to top ]