
Fターム[2F063BA29]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | 生体 (231)
Fターム[2F063BA29]に分類される特許
41 - 60 / 231
磁界振幅擾乱体の検出方法および検出器、この検出方法による位置特定方法、および位置特定システム

【課題】 複雑な計算および予備較正を要することなく、磁界振幅擾乱体を検出する方法を提供する。
【解決手段】 この方法は、相異なる任意の2つの周波数で放射される磁界の振幅が、あらかじめ定められた比で互いに関連付けられている、周波数の異なるいくつかの磁界を、同一の1軸磁界放射源から放射するステップ(62)と、周波数の異なるこれらのいくつかの磁界の振幅を、同一のセンサによって測定するステップ(64)と、測定された振幅のうちの2つの間の比が、相異なる2つの周波数で放射された磁界の、これらの2つの振幅を関連付けている、あらかじめ定められた比のあらかじめ定められた閾値から逸脱した場合には、磁界振幅擾乱体の存在を通知し(70)、逸脱しなかった場合には、通知しないステップとを含んでいる。
(もっと読む)
乗員姿勢検知装置およびエアバッグ展開制御装置

【課題】車両の座席に着座した乗員およびその姿勢を正確に検知する。
【解決手段】乗員姿勢検知装置100は、車両1のインストルメントパネル2に配置された第1静電容量センサ部10と、車室天井部3に配置された第2静電容量センサ部20と、回路部30とを備え、各静電容量センサ部10,20は、センサ電極11の検知面がそれぞれ検知領域DZに向くように配置されている。第1および第2静電容量センサ部10,20は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、インストルメントパネル2および車室天井部3の表面上に検知範囲Z1,Z2を形成して検知領域DZ内に乗員の体幹部48や頭部49があるか否かを検出して着座姿勢を判定する。
(もっと読む)
車両用ドア開閉角度制御装置
【課題】車両用ドアの外側および内側の障害物や人体の有無により車両用ドアの開閉角度を制御して、不用意な車両用ドアの他車等への接触を確実に防止する。
【解決手段】車両用ドア開閉角度制御装置は、車両1のサイドドア2の外側および内側に検知面が存するように配置された第1および第2静電容量センサ部10,20と、回路部30とを備える。各静電容量センサ部10,20は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、各静電容量センサ部10,20の表面上に検知範囲Z1,Z2を形成してサイドドア2の外側および内側の障害物や人体を検知する。ドアECU50は、回路部30からの出力によりサイドドア2の開閉角度や開閉動作を制御する。
(もっと読む)
車両用ドア開閉装置
【課題】車両用ドアの近傍の子供の有無によりドアの開閉動作を制御して、子供による不用意な車両用ドアの開操作を確実に防止する。
【解決手段】車両用ドア開閉装置は、車両1のフロントサイドドア2やリアサイドドアパネル3の外側に検知面が存するようにドアハンドル4,5の高さに配置された第1および第2静電容量センサ部10,20と、回路部30とを備える。各静電容量センサ部10,20は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、各静電容量センサ部10,20の表面上に検知範囲Zを形成して各ドア2,3の外側の人体(成人48)を検知する。子供49であると判定した場合は、各ドア2,3の開操作ができないように制限を加える。
(もっと読む)
車両用障害物検出装置および歩行者保護用エアバッグ展開制御装置
【課題】自動車等の車両に対する障害物を正確かつ確実に検出する。
【解決手段】車両用障害物検出装置は、車両1のフロントバンパー2に配置された静電容量センサ部10〜30と、回路部50とを備える。歩行者保護用エアバッグ展開制御装置は、制御部60、歩行者保護装置70および歩行者保護用エアバッグ81〜83を備える。歩行者保護用エアバッグ81〜83は各静電容量センサ部10〜30と対応する位置のボンネット3の後端側を跳ね上げ可能に配置されている。各静電容量センサ部10〜30は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、各静電容量センサ部10〜30の表面上に検知範囲Z1〜Z3を形成して障害物を検知する。
(もっと読む)
静電容量式障害物センサ及び当該障害物センサを備えた車両の開閉システム
【課題】開閉体を有する開口部における障害物の存在及び開閉体の位置を良好に検出可能な静電容量式障害物センサを提供する。
【解決手段】異なる周波数の交流信号を出力する複数の交流信号源15,16と、開閉体端部と枠体端部との何れか一方に設けられて開閉体端部と枠体端部との間に存在する障害物9との間の静電容量Csを検出する検出電極5と、開閉体端部及び枠体端部の他方に設けられた遮蔽電極7と、検出電極5及び遮蔽電極7に印加される交流成分f1,V1に基づいて、検出電極5と障害物9との間の静電容量Csを求め、障害物9が存在するか否かを判定すると共に、遮蔽電極7に印加されず検出電極5に印加される交流成分f2,V2に基づいて、検出電極5と遮蔽電極7との間の静電容量を求め、開閉体端部と枠体端部との距離を判定する制御部20とを有する。
(もっと読む)
静電容量センサ
【課題】物体の位置を検出できるようにする。
【解決手段】検出電極Aと検出電極Bとは、所定の距離だけ離れた位置に配置され、シールド電極SEは、検出電極Aと検出電極Bを取り囲むようにして配置され、物体Pを検出する方向に開口部を有する。除算回路13は、物体Pと検出電極Bにより形成される静電容量Cbに応じたCV変換出力を、物体Pと検出電極Aにより形成される静電容量Caに応じたCV変換出力で除算し、その除算結果から得られる物体Pとの距離に関する情報を出力することにより、物体Pの位置が検出できるようになる。本発明は、車両等の開閉体等への人体の挟み込みの検出に用いられる静電容量センサに適用できる。
(もっと読む)
人体腔内壁の三次元測定方法、並びにその装置及びシステム
駆動信号励起のもと、分離可能なフィールドを発生する少なくとも一つのフィールド発生装置と、前記目標装置に位置し、前記分離可能なフィールドを検出しセンサ信号を発生する少なくとも一つのフィールドセンサと、前記フィールド発生装置に駆動信号を送信し、前記フィールドセンサ信号の出力を検出して、前記目標装置のセンサの存在する位置の五次元位置及び配向座標データを取得する位置決め信号処理装置と、を含む、人体腔内壁の三次元測定方法、並びにその装置及びシステム。 (もっと読む)
歯の噛み合わせ測定装置
【課題】上下の歯の接触状態における移動距離に対する姿勢や軌跡を検出して表示して、歯の噛み合わせを正確に検出する。
【解決手段】歯の噛み合わせ測定装置は、下顎12の上顎11に対する相対位置と相対姿勢とを検出する位置検出センサ30と、この位置検出センサ30で検出される下顎12の上顎11に対する相対位置と相対姿勢から、上下の歯の接触状態における移動距離に対する相対姿勢を演算する演算回路31と、この演算回路31で演算される移動距離に対する相対姿勢を表示する表示モニタ32とを備える。
(もっと読む)
顎運動の測定装置とこれに使用されるセンサコイルの製造方法
【課題】能率よくセンサコイルを多量生産しながら、X軸コイルとY軸コイルとZ軸コイルを互いに直角な姿勢に配置して上顎と下顎の相対位置を正確に検出する。
【解決手段】顎運動の測定装置は、交流電源3に接続される励磁コイル1から誘導される交流をセンサコイル2で検出して歯の相対位置を検出する。励磁コイル1とセンサコイル2は、互いに直交する方向に巻かれているX軸コイル1a、2aとY軸コイル1b、2bとZ軸コイル1c、2cとを備える。測定装置は、励磁コイル1を交流電源3で励磁し、センサコイル2に誘導される交流信号を演算回路4が演算して、センサコイル2を固定する歯の位置を立体的に演算する。さらに、X軸コイル2aとY軸コイル2bとZ軸コイル2cからなるセンサコイル2は、コイル状に巻かれたループコイル8を、互いに直交する3つの平面を有するコアー材7の直交する平面7Aに固定している。
(もっと読む)
顎運動の測定装置
【課題】各々のコイル間に発生するクロストークによる誤差を少なくして、センサコイルの位置を正確に検出する。
【解決手段】顎運動の測定装置は、交流電源3に接続される励磁コイル1からセンサコイル2に誘導される交流信号から、励磁コイル1に対するセンサコイル2の相対位置を検出する。測定装置は、センサコイル2のX軸コイル2aに誘導される交流信号を、センサコイル2のY軸コイル2bとZ軸コイル2cから誘導されるクロストーク信号で補正し、センサコイル2のY軸コイル2bに誘導される交流信号を、センサコイル2のX軸コイル2aとZ軸コイル2cから誘導されるクロストーク信号で補正し、センサコイル2のZ軸コイル2cに誘導される交流信号を、センサコイル2のX軸コイル2aとY軸コイル2bから誘導されるクロストーク信号で補正して、クロストーク信号で補正された交流信号でもって、センサコイル2を固定する歯の位置を演算する。
(もっと読む)
乗員姿勢検知装置および乗員姿勢検知方法
【課題】安価に構成可能でコストの削減を図りつつ乗員の姿勢を検知する。
【解決手段】乗員姿勢検知装置100は、静電容量センサ部10と回路部20とを備える。静電容量センサ部10は、車室天井部2の座席40の前方および座席40の直上にそれぞれ配置された第1および第2検知電極11,12を備え、各検知電極11,12は切替スイッチSW1,SW2を介して回路部20の静電容量検知回路21とシールド駆動回路23とにそれぞれ接続されている。回路部20のCPU29は、静電容量検知回路21にて検出された各検知電極11,12からの静電容量に基づく静電容量値を用いて、座席40に着座した乗員(人体)48の頭部49の位置の情報に基づいて着座姿勢を判定する。判定した着座姿勢に関する姿勢情報は、車両1に搭載されたECUに出力され、エアバッグの展開等の制御に用いられる。
(もっと読む)
モーション検出装置及びモーション検出方法
【課題】使用環境に制限が少なく、簡素な構成の静電容量式モーション検出装置及びそれを用いた入力装置を提供すること。
【解決手段】駆動電圧を印加する第1の駆動電極5と第1の駆動電極5の両側に第1の駆動電極5との間にそれぞれ静電容量を形成するように配置される第1の検出電極対6、7とからなる第1センサ部3と、第1の駆動電極5と略直交して配置される第2の駆動電極8と第2の駆動電極8の両側に第2の駆動電極8との間にそれぞれ静電容量を形成するように配置される第2の検出電極対9、10からなる第2センサ部4と、第1のセンサ部3の静電容量の変化で検出される第1差分値と前記第2センサ部4の静電容量の変化で検出される第2差分値とを用いて被検出体の各種モーションを検出する。
(もっと読む)
物体検出装置及び物体検出方法
【課題】 静電容量センサの計測範囲を最大限に確保しながら、計測対象物体との近接距離を好適に算出できるようにする。
【解決手段】 複数のセンサ電極が配設されて構成されたセンサ電極群120と、センサ電極群120のうち、物体と非接触状態であるセンサ電極に基づいて、物体との近接状態を静電容量として検出する静電容量センサ回路110と、静電容量センサ回路110で検出された静電容量に応じて、非接触状態であるセンサ電極と物体との近接距離を計算する近接距離計算部142と、センサ電極群120のうち、物体と接触状態であるセンサ電極に基づいて、物体との接触に係る詳細情報を検出する接触スイッチ回路130と、接触スイッチ回路130で検出された詳細情報を取得する取得部141を具備する。
(もっと読む)
電磁追跡システムの動的金属歪補償のためのシステム及び方法
電磁場発生器(12)による電磁場を用いて電磁追跡システム(EMTS)(10)を用いる動的金属歪補償のための方法及びシステムを提供する。複数の基準マーカ(14)が備えられ、各々の基準マーカは少なくとも1つの電磁センサ(26)を有し、少なくとも1つの電磁センサは複数のセンサオリエンテーションに方向付けられ、センサの少なくとも一部は所定ボリュームに近接して位置付けられる。基準マーカ(14)は画像空間においてそれらの位置を与えるように画像化される。電磁センサ(26)の位置読み取りはEMTSを用いてモニタリングされる、金属歪補正関数は、電磁センサの位置と画像空間の基準マーカの位置を比較することにより演算される。所定ボリュームを通って移動する医療装置(16)はまた、EMTSを用いて追跡され、歪補正関数が、歪を補償するように医療装置の位置読み取りに適用される。 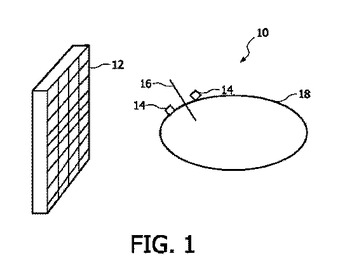 (もっと読む)
(もっと読む)
機械的特性に基づくプローブの可視化
【課題】被験者体内のプローブの長さに沿って配置される複数のポイントにおいて、それぞれの見かけの座標を示す入力値を受信することと修正座標をもたらすことと、修正座標を用いてプローブの画像を表示することと、を含む可視化方法と可視化装置を提供する。
【解決手段】可視化方法には、被験者16体内のプローブ12の長さに沿って配置される複数のポイントにおいて、それぞれの見かけの座標を示す入力値を受信することと、体内のプローブにより想定可能な形状に対するコスト関数を計算するため、見かけの座標に対してプローブの既知の機械的特性モデルを適用することと、が含まれる。コスト関数に対して応答可能なように形状が選択され、その形状に基づきプローブの長さに沿ったポイントの修正座標がもたらされる。続いて、修正座標を用いたプローブの画像が表示される。
(もっと読む)
繊維状変形センサおよび布帛状変形センサ
【課題】 空気中で安定的に高い応答感度で機能する軽量で可撓性を有する繊維状あるいは布帛状の変形センサを提供する。
【解決手段】 繊維状変形センサ10は、ヘテロ原子を有する単量体単位を含む重合体または該重合体のブロックを含むブロック共重合体から選ばれる高分子成分と、イオン液体とを含有する非水系高分子固体電解質12の変形により、非水系高分子固体電解質12に接し、互いに絶縁された少なくとも一対の電極11・13に電位差を発生する変形センサであって、非水系高分子固体電解質12と電極11・13とが繊維断面を構成して繊維長方向に連続する複合繊維である。布帛状の変形センサはこの複合繊維10を織布、不織布、編成物にしたものである。
(もっと読む)
位置検出装置
【課題】簡単な構造で安価に検知領域の範囲に近接等する検知対象物の位置や距離を確実に検出し、設計自由度を向上させる。
【解決手段】位置検出装置100は、静電容量センサ部10および検出回路部20を備え、静電容量センサ部10は、第1および第2検知電極11,12と、これらの間に配置された誘電体19とからなる。誘電体19は、検知面19a上に検知領域の範囲Lを形成する。検出回路部20は、静電容量検知回路21,22と、A/D変換器23,24と、演算処理回路25とを備え、各静電容量検知回路21,22は演算処理回路25の制御により周期的に同期がとられて動作する。各検知電極11,12にて検知された静電容量の検出値C1,C2に基づき、演算処理回路25によって検知領域の範囲Lにおける検知対象物の位置を判定して検出する。
(もっと読む)
コモンモード相殺を有するピクセル検知回路
【課題】 例えば指紋検知用に適合させた改良型生物測定データ検知回路が、所謂「コモンモード」信号を回路出力から削除するために回路積分器の入力において電荷減算技術を使用する。
【解決手段】 その結果得られる出力信号は、(a)線形であり、(b)検知したオブジェクト(例えば、指)の存在に起因する何らの増幅効果が無く、且つ(c)検知したオブジェクトの微細な表面幾何学形状(即ち、指紋の山及び谷)を表している。
(もっと読む)
位置測定におけるエラーの校正及び補正
【課題】 位置検知システムが実際に作動しなければならない、現実の、非理想測定条件を校正及び補償するための方法及びシステムを提供する。
【解決手段】 身体内の対象物の位置を検知するために方法及びシステム方法は、身体内のプローブを位置決めし、プローブ上の少なくとも1つの第1電極と身体の表面上の複数の第2電極との間を通過するマッピング電流の測定を行い、第1電極及び第2電極以外の1つ又はそれ以上の装置に結合しているシステム依存的電気結合への効果を含む、測定値の1つ又はそれ以上の非理想特性を補償するように測定値を校正し、校正された測定値を用いて身体内のプローブの位置を計算することを含む。
(もっと読む)
41 - 60 / 231
[ Back to top ]