
Fターム[2F063DD05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器の組み合せ (1,287) | 同一種類の検出器を用いるもの (1,165) | 4個、2対の検出器 (110)
Fターム[2F063DD05]に分類される特許
41 - 60 / 110
漏洩磁束検出型回転位置検出装置を組み込んだ液密サーボモータ装置
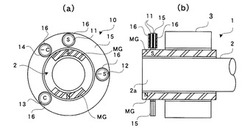
【課題】小型化、液密構造に適し、温度ドリフト補償に優れ、検出信号の伝送路のインピーダンス変化の影響を受けにくい回転位置検出装置を備えたサーボモータ装置を提供する。
【解決手段】サーボモータ1と共に液密にケーシング4内に収納されたセンサ10は、サーボモータ回転子から生じる漏洩磁束を検知する複数のコイルを備え、各コイルに対応して高透磁率磁性体がそれぞれ近接配置され、該高透磁率磁性体においては回転位置に対応する漏洩磁束の変化に応じて磁気飽和が生ぜしめられる。各コイルは磁気飽和の変化特性に応じて、回転位置に対応した振幅関数を持つ交流信号を出力する。正弦関数的振幅特性の2つのコイルは漏洩磁束の変化に対して互いに逆相となるように配置され、余弦関数的振幅特性の別の2つのコイルも同様に互いに逆相となるように配置される。この出力交流信号を合成して、電気的位相によって回転位置を示す検出信号を生成する。
(もっと読む)
原点検出装置

【課題】 特に、固定磁性層及びフリー磁性層を有する磁気抵抗効果素子を用いて、従来に比べて高精度に原点検出を行えるようにした原点検出装置を提供することを目的としている。
【解決手段】 磁石1の中心1cが原点Pにあるとき、各磁気抵抗効果素子のフリー磁性層には水平磁場成分H1が作用するためフリー磁性層をその水平磁場方向に向かせることができ、磁化を安定化でき、ヒステリシスを十分に小さくでき、高精度な原点検出を行うことができる。そして前記磁石1の中心1cが、原点Pに位置したとき、差動出力がゼロになり、それ以外の時には差動出力が生じているため、差動出力の有無の判断により、原点検出を行うことができ、基準電圧設定回路が必要でない等、簡単な回路構成で、高精度な原点検出を行うことが可能である。
(もっと読む)
センサ装置並びに入力装置、遊技球発射装置
【課題】直線的に変位する検出対象物体の動作パターンに関わらず当該検出対象物体の位置検出が可能なセンサ装置を提供する。
【解決手段】センサ装置は、巻軸方向が所定の直線方向となるように配置される検出コイル21と、検出コイル21の筒内への挿入量が変化するように検出対象物体の変位に応じて上記巻軸方向に移動自在に配置される導電性筒体31と、導電性筒体31の変位に応じた検出コイル21のインダクタンス変化に基づいて検出対象物体の変位に比例した位置信号を出力する制御基板4とを備えている。
(もっと読む)
ストロークセンサ
【課題】センサコイルの故障時にも誤ったシフトレンジが検出されることを防止できるストロークセンサを提供する。
【解決手段】被検知体50の導体片51〜57は、スライダ41の下面に所定のパターンで2次元配置されている。具体的には、スライダ41の下面はY方向において各検知部61〜64にそれぞれ対応する4つの領域に区分され、各導体片51〜57は、各領域におけるX方向の所定の範囲にそれぞれ配置される。ここで、導体片51〜57の配置は、X方向において、シフトレンジごとに検知部60にて検知される導体片51〜57の組み合わせが異なるように設定される。しかして、シフトレンジが切り替わる度に、導体片51〜57を検知する検知部61〜64の組み合わせが変化し、検知状態となった検知部61〜64の組み合わせからシフトレンジを特定できる。
(もっと読む)
位置検知入力装置用入力媒体および位置検知入力装置
【課題】入力媒体の傾きが変わっても該磁石の磁界の方向が変わらない特徴を有する位置検知入力装置用入力媒体を提供する。
【解決手段】位置検知入力装置用入力媒体10は、磁石12を載置する空間14が形成され、該空間14内で該磁石12が自在に動くことができるように構成されており、全体としては例えば磁石12を内蔵したタッチペンのような構造からなる。本発明では、磁石12を固定せず自在に動くことができるよう磁石12より大きい空間14を内部に形成し、この空間14内に磁石12を載置することでこの課題を解決している。
(もっと読む)
曲げセンサ
【課題】端子数を減らし、接続箇所を小型化することができる曲げセンサを提供することを目的とする。
【解決手段】フィルムの表面に第1の抵抗体および第2の抵抗体を形成し、前記フィルムの裏面に第3の抵抗体および第4の抵抗体を形成し、前記フィルムを貫通する第1のスルーホールを介して前記第1の抵抗体の一端と前記第3の抵抗体の一端とを接続し、前記フィルムを貫通する第2のスルーホールを介して前記第1の抵抗体の他端と前記第4の抵抗体の一端とを接続し、前記フィルムを貫通する第3のスルーホールを介して前記第2の抵抗体の一端と前記第3の抵抗体の他端とを接続し、前記フィルムを貫通する第4のスルーホールを介して前記第2の抵抗体の他端と前記第4の抵抗体の他端とを接続してなり、前記第1の抵抗体、前記第2の抵抗体、前記第3の抵抗体および前記第4の抵抗体によってブリッジ回路を形成することを特徴とする。
(もっと読む)
車両のシフト位置検出装置
【課題】シフトレバーが2軸方向に移動する場合であれ、シフト位置検出装置としての部品点数の増加を招くことなくシフトレバーのシフト位置を検出することが可能な車両のシフト位置検出装置を提供する。
【解決手段】このシフト位置検出装置は、車両のシフトレバーの2軸方向の操作に連動して互いに直交する2軸方向に移動するとともにこの移動に伴ってMREセンサ1に近接するカウンタ磁石2と、MREセンサ1にバイアス磁界を付与するバイアス磁石3とを備えている。そして、カウンタ磁石2がMREセンサ1に近づくときに生じるバイアス磁界の磁気ベクトルの変化をMREセンサ1により感知してカウンタ磁石2のMREセンサ1への近接を検知するとともに、この検知に基づいてシフトレバーのシフト位置を検出する。ここでは、バイアス磁石3の着磁方向とカウンタ磁石2の着磁方向とを互いに直交させるようにしている。
(もっと読む)
多段モータを駆動源とする基板搬送ロボット
【課題】多段同芯モータを駆動源に有する基板搬送ロボットにおいて、モータの検出部が小型であって、アームの高い制御性能を確保でき、また検出部の交換が容易な基板搬送ロボットを提供する。
【解決手段】ロボットアームを駆動する第1回転モータ13と第2回転モータ14を軸方向に多段に配置した駆動部を有する基板搬送用ロボットにおいて、第1回転モータ13の回転位置検出部が、第1インクリメンタルエンコーダヘッド21と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ25a,bとから成り、第2回転モータ14の回転位置検出部が、第2インクリメンタルエンコーダヘッド22と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ26a,bとから成るよう構成した。
(もっと読む)
減速装置
【課題】寸法精度の高い合成樹脂の射出成形品からなる間欠回転部材(ゼネバ歯車)を備えた減速装置を提供する。
【解決手段】回転部材2と、該回転部材2が1回転する毎に、該回転部材2に突設された駆動ピン2aにより所定角度だけ間欠的に回転する合成樹脂製の間欠回転部材3とをもって、減速装置を構成する。間欠回転部材3には、駆動ピン2aを挿入可能な複数の駆動ピン挿入溝3aを放射状に形成する。また、各駆動ピン挿入溝3aの間には、駆動ピン挿入溝3aを跨いで、その両側を連結する溝連結部6を形成する。これにより、射出成形時の合成樹脂の硬化収縮に起因する駆動ピン挿入溝3aの変形を防止できる。
(もっと読む)
ポインティングデバイス
【課題】組立性が向上し、かつ小型化の可能なポインティングデバイスを提供すること。
【解決手段】シリコーン樹脂63を実装基板64に対して平行な面内においてずらすように動かすと、このシリコーン樹脂63は、切り欠き部67aの端部を支点として揺動し、これにともないマグネット62も同様に揺動する。実装基板64上に設けられた複数の磁気センサ61と、実装基板64上に設けられて、任意の方向に揺動可能とする空間部67を有する弾性部材63と、この弾性部材63に設けられたマグネット62とを備え、弾性部材63の弾性変形によるマグネット62の揺動によって生じる磁気密度変化を複数の磁気センサ61で検出し、座標情報又はベクトル情報を入力するように構成されている。
(もっと読む)
直線移動量検出装置
【課題】直線方向の移動量を直接検出できる高精度で安価な直線移動量検出装置を提供する。
【解決手段】固定部10に対して、所定範囲Dxで直線移動する可動部20の移動量Xを検出する直線移動量検出装置101であって、固定部10または可動部20のいずれか一方に配置され、所定磁界Ba,Bbを発生する磁石20a,20bと、固定部10または可動部20のもう一方に、直線移動するX方向で所定間隔Lを置いて平行に配置される2個のホール素子10a,10bとを有してなり、2個のホール素子10a,10bの出力が、それぞれ、直線移動する所定範囲Dxにおいてsin関数またはcos関数で近似され、所定の位相差αを持つように、所定磁界Ba,Bbと所定間隔Lが設定されてなり、2個のホール素子10a,10bの出力と位相差αを演算して、可動部20の移動量Xを検出する。
(もっと読む)
被覆金属線の被覆厚測定装置
【課題】被覆の表面に凹凸を有する被覆金属線8であっても、変位センサ17及び被覆26の双方に衝撃、又は損傷を加えることなく、変位センサ17を被覆金属線8に近接させて被覆厚の測定を精度よく行うことが可能となる被覆厚測定装置を提供すること。
【解決手段】一方向に移送される被覆金属線8の被覆26に接触して配置され、この被覆26を介して芯線25までの距離を測定する変位センサ17を有するセンサ部9と、このセンサ部9に対して被覆金属線8の移送方向の上流側に配置され、前記センサ部9が測定する前記被覆26の部位において、被覆表面から所定値以上の高さを有する凸部又は所定値以上の深さを有する凹部を検出する検出部10とを備えている。
更に、センサ部9を保持する駆動手段11は、検出部10が上記凸部又は凹部を検出したときにセンサ部9を被覆26より遠ざけることを特徴とする。
(もっと読む)
自動車両のための物体検出装置
【課題】物体のサイズに関わらず、検出エリア内の物体の存在を効率よく感知することができる検出装置を提供する。
【解決手段】検出装置(2)のキャパシタンス変動を測定して物体(3)を検出する検出装置(2)は、それぞれが電界を送信または受信できる少なくとも1対(4、6、8)のセンサパッド(10)を有する。前記パッド(10)のインピーダンス変動を測定するのにそれぞれのセンサパッド(10)を用いることができる。それぞれのセンサパッド(10)は、インバータ(38)とオシレータ(56)と電力供給レール駆動部(40)とスイッチ(48、50、52)とを有する駆動レールインピーダンス測定システム(18)によって駆動される。この駆動レールインピーダンス測定システム(18)は、インバータ(38)の電力供給レール駆動部(40)の入力(46)へのオシレータ(56)の駆動をオン/オフして、センサパッド(10)の機能を電界送信部から電界受信部またはインピーダンス測定部に変更することができる。
(もっと読む)
操作位置判定装置
【課題】簡単な構成で、正確に所定の操作位置を判定することができる操作位置判定装置を提供する。
【解決手段】操作位置判定装置1は、磁石2と、第1のハーフブリッジ回路、及び第2のハーフブリッジ回路を有する第1のMRセンサ4と、第3のハーフブリッジ回路、及び第4のハーフブリッジ回路を有する第2のMRセンサ5と、判定部6と、を備え、判定部6は、磁石2によって発生する磁界に基づいて第1のハーフブリッジ回路と第3のハーフブリッジ回路から出力される出力信号の第1の差分値と、第2のハーフブリッジ回路と第4のハーフブリッジ回路から出力される出力信号の第2の差分値とを、所定の区間に分け、その区間の組合せに基づいて操作位置を判定する。
(もっと読む)
操作位置判定装置
【課題】必要とする磁石の数を減らして部品点数を削減し、さらに組み付け性を向上させることができる操作位置判定装置を提供する。
【解決手段】レバーコントロールスイッチ装置1の判定部5は、Z方向の操作位置を判定するため、第1のMRセンサ40の第2のフルブリッジ回路401から出力される出力電圧V12と、第4のMRセンサ43の第2のフルブリッジ回路431から出力される出力電圧V42との差分値を算出し、算出した差分値に基づいてZ=−2mm、Z=0mm、Z=+2mmの3つの操作位置を判定する。判定部5は、3つの操作位置のそれぞれに対応するフルブリッジ回路の組合せに従って、X及びY方向の操作位置を判定する。
(もっと読む)
回転検出装置
【課題】磁気検出素子の温度依存性の影響を受けることなく、ロータの回転態様を高い精度で検出することのできる回転検出装置を提供する。
【解決手段】この回転検出装置は、ロータ21の回転に伴い軸線n1の周りを回転する2つの磁石22a,22bを備え、磁石22a,22bが回転するときに磁石22a,22bから発せられる磁界の変化を磁気センサ23により検出してロータ21の回転角度を検出する。ここでは、磁石22a,22bを軸線n2の方向に並設するとともに軸線n3の方向に延伸された形状とし、且つ、軸線n2に沿って異極同士が向かい合う態様にてそれぞれ着磁する。また、磁気センサ23を、2つの磁石22a,22bに挟まれる領域から軸線n1の方向にギャップgだけずれた位置に配置する。そして、磁気センサ23から出力される電圧信号から逆正接値を演算し、この逆正接値に基づいてロータ21の回転角度を検出する。
(もっと読む)
操作位置判定装置
【課題】必要とする磁石の数を減らして部品点数を削減し、さらに組み付け性を向上させることができる操作位置判定装置を提供する
【解決手段】レバーコントロールスイッチ装置1の判定部5は、Z方向の操作位置を判定するため、第1のハーフブリッジ回路(S1_0°)の出力電圧V1と第5のハーフブリッジ回路(S3_0°(M1、M2))の出力電圧V5との差分を算出することで、出力電圧V11を算出する。判定部5は、この出力電圧V11の値によってX方向なら第1及び第3のMRセンサ40、42を構成するハーフブリッジ回路を組み合わせて出力電圧を算出し、Y方向なら第2及び第4のMRセンサ41、43を構成するハーフブリッジ回路を組み合わせて出力電圧を算出して、X、Y方向の操作位置を判定する。
(もっと読む)
回転検出装置
【課題】磁気検出素子の温度依存性の影響を受けることなく、ロータの回転態様を高い精度で検出することのできる回転検出装置を提供する。
【解決手段】この回転検出装置は、磁気センサ23と、ロータ21の回転に伴い軸線n1の周りを回転する磁石22とを備え、磁石22が回転するときに磁石22から発せられる磁界の変化を磁気センサ23により検出してロータ21の回転角度を検出する。ここでは、磁石22を、軸線n1に平行な軸線n2を中心軸とする円柱状に形成するとともに軸線n2の方向に着磁する。また、磁気センサ23を、磁石22の中心Csの描く回転軌跡を含む円周上から軸線n1の方向にギャップgだけオフセットした位置に配置し、さらに、その検出面を、磁石22の中心Csの回転平面と平行となる態様にて配置する。そして、磁気センサ23から出力される電圧信号から逆正接値を演算し、この逆正接値に基づいてロータ21の回転角度を検出する。
(もっと読む)
車両用接近検知装置
本装置(4)は、物体の存在によって引き起こされるキャパシタンスの変化を測定することによって、検知ゾーン内における前記物体の存在を検知する。本装置は、電場を放射する放射素子(6)と、電場を受信する受信素子(8)と、前記放射素子(6)と前記受信素子(8)の間のカップリング・キャパシタンスを測定する手段とを具備する。前記放射素子(6)は、前記受信素子(8)に受信される電気信号を放射する。その結果、検知ゾーンに物体が存在しない場合に、所定値のカップリング・キャパシタンスが、前記放射素子(6)と前記受信素子(8)の間に確立され、前記放射素子(6)と前記受信素子(8)の間のカップリング・キャパシタンスの変化は、検知ゾーン内における物体の変位を示し、所定値と異なる値でのキャパシタンスの確立は、静止物体の存在を示す。  (もっと読む)
(もっと読む)
アンテナ装置とそれを用いた電子機器
【課題】
本発明は、例えば自動車(電子機器)などに装着され使用されるアンテナ装置とそれを用いた電子機器に関するものであり、小型化を図るとともに位置検出精度を高めることを目的とする物である。
【解決手段】
そしてこの目的を達成するために本発明は、前面側において、所定間隔をおいて設置された第1、第2の送受信開口11a,11bを有するアンテナ体7と、このアンテナ体7の後方において、導波路体8を介して設けた送受信体9を備え、前記導波路体8は、前記アンテナ体7の第1、第2の送受信開口11a,11bに対する導波路長を可変する構成とした。また、前記可動導波路10の固定導波路12、36と対向する面に、固定導波路12、36に向けて突出するほぼλ/4の複数の突起44を設け、この突起44を一構成要件とする位置検出手段を設けた。
(もっと読む)
41 - 60 / 110
[ Back to top ]