
Fターム[2F063DD05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器の組み合せ (1,287) | 同一種類の検出器を用いるもの (1,165) | 4個、2対の検出器 (110)
Fターム[2F063DD05]に分類される特許
21 - 40 / 110
回転角・トルクセンサ
【課題】必要な部品点数が少なく、車両の省スペース化を実現できる回転角・トルクセンサを提供する。
【解決手段】回転角・トルクセンサ100において、それぞれ回転軸に対して固定された第1及び第2の磁気センサ10,11と、第1のシャフト4の回転に応じて、第1の磁気センサ10の位置に第1周期数の周期的な第1の磁界を生成する磁石ローター1と、第2のシャフト5の回転に応じて、第2の磁気センサ11の位置に第2周期数の周期的な第1の磁界を生成する磁石ローター2と、第1及び第2の磁気センサ10,11の出力に基づいて第1及び第2のシャフト4,5それぞれの機械角を算出するとともに、算出した第1及び第2のシャフトそれぞれの機械角に基づいて第1のシャフト5にかかるトルクを算出する演算回路30とを備え、第1周期数と第2周期数とは互いに異なることを特徴とする。
(もっと読む)
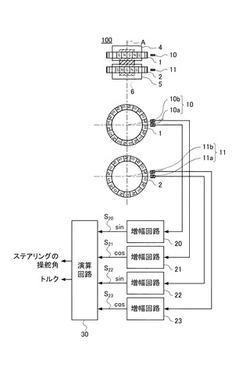
回転角・トルクセンサ

【課題】軸ぶれをキャンセルでき、かつトルクセンサと回転角センサ両方の機能を有する回転角・トルクセンサを提供する。
【解決手段】回転角・トルクセンサ100において、それぞれ回転軸に対して固定された第1乃至第4の磁気センサ10〜13と、第1のシャフト4の回転に応じて、第1及び第3の磁気センサ10,12の位置に第1周期数の周期的な第1の磁界を生成する磁石ローター1と、第2のシャフト5の回転に応じて、第2及び第4の磁気センサ11,13の位置に第2周期数の周期的な第1の磁界を生成する磁石ローター2と、第1及び第3の磁界センサ10,12の出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁界センサ11,13の出力に第2の演算を施すことにより得られる演算出力とに基づいてステアリングの操舵角とトルクとを算出する演算回路30とを備え、第1周期数と前記第2周期数とは互いに異なることを特徴とする。
(もっと読む)
回転位置センサ
【課題】回転角度の高い分解能を得られると同時に、小型化した回転位置センサを提供すること。
【解決手段】ロータ平板13の外周部につづら折り状の励磁コイル14が形成され、内周部にロータ側ロータリィトランス7が形成されていること、ステータ平板11の外周部に、つづら折り状のn個の検出コイル12A、12B、12C、12D(本実施の形態では、n=4)が形成され、内周部にステータ側ロータリィトランス8が形成されていること、4個の検出コイル12A、12B、12C、12Dが、重なり合わないように、円周方向に並べて配置されていること、4個の検出コイルは、各々、電気角で360度/8ずつずらして配置されていること、ステータ側ロータリィトランス8及びロータ側ロータリィトランス7を介して、励磁コイル14に高周波信号を励磁する高周波励磁回路22、21を有すること、を特徴とする。
(もっと読む)
回転角度検出装置
【課題】回転角度の検出に用いる構成を利用して、回転体の軸ずれを検知可能とした回転角度検出装置を提供する。
【解決手段】円盤状の回転体20の回転角度を検出する回転角度検出装置において、回転体20の円盤面には、複数の溝Dを設け、回転体20が回転したとき、溝Dの有無によって変化する磁界に応じて誘起され交流電圧を生成する検出コイル32A,32B,32C,32Dを円盤面に対向して設け、検出コイル32A,32B,32C,32Dに誘起される交流電圧に基づき回転体20の回転角度を求めるとともに、回転体20の軸ずれの有無を検出する回転角度検出装置。
(もっと読む)
回転検出装置
【課題】回転角度を算出することなく、回転軸が予め定めた角度に位置することを検出することができる回転検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シャフト3の回転に伴って磁界の向きが変わるように配置された磁石21と、磁石21の磁界に応じて信号を出力し、シャフト3が予め定めた回転角度にあるときに出力する信号が切り替わるように配置されるMRセンサと、複数のMRセンサ200a〜200dの出力する信号が切り替わる回転角度がそれぞれ異なるようにMRセンサ200a〜200dを配置し、複数のMRセンサ200a〜200dの出力する信号の組み合わせに応じてシャフト3の角度範囲を検出するシフトポジション検出手段801とを有する。
(もっと読む)
ポジションセンサ
【課題】対象物の変位に対する検出コイルのインダクタンスの変化の直線性を向上させることのできるポジションセンサを提供する。
【解決手段】各誘電体基板1,2の表面に印刷形成された検出コイルCoと、検出コイルCoと対向して配置されるとともに対象物の変位と連動して検出コイルCoに対して円周軌道上を変位する検出体30a,30bと、検出体30a,30bの変位に応じて変化する検出コイルCoのインダクタンスに基づいて対象物の変位を検出する検出部とを備え、検出コイルCo又は検出体30a,30bのうち少なくとも何れか一方を、検出体30a,30bの変位に対する検出コイルCoのインダクタンスの変化率が一定となる形状に形成した。
(もっと読む)
可変分光素子
【課題】高速且つ正確に光学特性を変化させることのできる可変分光素子を提供する。
【解決手段】第1センサと第3センサ、第2センサと第4センサが、一対の光学基板2の対向面の重心を結んだ線を軸として対称となる位置に配置され、第1〜4アクチュエータの各々が、一対の光学基板2の対向面の重心から第1〜4センサの各々の中心方向へ伸びる線の線上に配置された可変分光素子であって、第1〜4センサの信号から、一対の光学基板2の対向面の重心同士の間隔xを算出し、第1センサの信号と第3センサの信号から、移動させる光学基板の対向面と重心を結んだ線に垂直な面がなす第1の角度θを算出し、第2センサの信号と第4センサの信号から、重心を結んだ線に垂直な面と移動させる光学基板の対向面がなす第2の角度φを算出し、重心同士の間隔x、第1の角度θ及び第2の角度φに基づいて第1〜4アクチュエータを駆動する制御部を備えている。
(もっと読む)
ワイヤーロープの径測定装置
【課題】移動するワイヤーロープに対して径の測定ができ、ワイヤーロープへの取り付けが容易なワイヤーロープの径測定装置を提供する。
【解決手段】ワイヤーロープ11が隙間を有して挿通される貫通孔12が形成された枠体部材13と、貫通孔12の周囲に3個以上のセンサ部14〜17が間隔をあけて設けられ、センサ部14〜17部で貫通孔12を挿通するワイヤーロープ11までのそれぞれの距離を検知する距離検出手段18と、距離検出手段18からの信号を基に、ワイヤーロープ11の直径を演算する制御部19とを有し、枠体部材13は、貫通孔12を中心に少なくとも2つに分割可能である。
(もっと読む)
回転角検出装置およびこれを備えたパワーステアリング装置
【課題】シャフトが径方向にずれた場合に検出誤差を抑制することのできる回転角検出装置およびこれを備えたパワーステアリング装置を提供する。
【解決手段】インプットシャフト41に一体に設けられ、インプットシャフト41の周方向に所定の間隔をもってN極およびS極が着磁された磁性部材44と、磁性部材44に対向配置されてN極およびS極による磁界の変化を検出するMRセンサ45とを備えた回転角センサ50において、MRセンサ45をインプットシャフト41の周方向に異なる位置に複数配置する。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の磁気センサで操作位置を判別し、また、磁気センサの1つが故障しても各操作位置の検出に支障がなく、さらに、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シフトレバー22に配置された磁石10と、磁気センサとしての第1〜第4のMRセンサ11〜14と、判別部としての制御部15と、を備えて概略構成され、第1〜第4のMRセンサ11〜14の出力の判定結果とポジションを対応させたシフトポジション情報160に基づいて各ポジションを判別する。
(もっと読む)
変速位置検出装置
【課題】 電源を供給する制御装置が故障した場合であっても、変速装置のニュートラルを表示することができる変速位置検出装置を提供する。
【解決手段】 車両の変速装置の変速位置を操作するシャフトに連動して回動する回転部材1と、回転部材1とともに回動する磁石2と、磁石2が回転することによって磁石2の磁界の強さを検出する磁気検出部3と、この磁気検出部3からの検出信号を受ける制御装置8と、を備えた変速位置検出装置Aにおいて、磁気検出部3は、前記変速装置の変速位置を前記シャフトの位置から検出する第1の磁気検出部31Aと前記変速装置のニュートラルを前記シャフトの位置から検出する第2の磁気検出部31Bとを備え、第2の磁気検出部31Bは、制御装置8以外の他の装置から駆動電源が供給されるものである。
(もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1の移動線y1の直下に配置される第2のMR回路12と、第2の移動線y2の直下に配置される第3のMR回路13と、第2の移動線y2に対し第2のMR回路12とは反対側でd1だけ離間する第4のMR回路14と、位置判定部40とを備える。この位置判定部40は、第1及び第3のMR回路11、13の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第4のMR回路12、14の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1及び第2の移動線y1、y2の中間位置に配置される第2のMR回路12と、第2の移動線y2に対し第1の移動線y1とは反対側にd1だけ離間する第3のMR回路13と、位置判定部40とを備える。この位置判定部40は、第1及び第2のMR回路11、12の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第3のMR回路12、13の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
ポジションセンサ
本発明は、磁気素子(34)用の少なくとも1つのガイドレール(36,38)を有するガイドハウジング(14)を備えたポジションセンサ(10)に関する。ガイドハウジング(14)には、リードフレーム構造部(50)および/または導体路(40)を電気絶縁しかつ/または固定する射出成形部(48)が収容されている。射出成形部(48)は、磁気素子(34)用の紛失防止手段(42,44)を形成する。 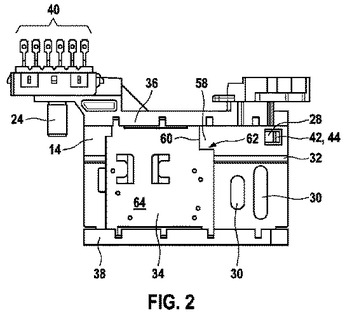 (もっと読む)
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】故障などにより異常となった出力信号を特定可能な回転角検出装置を提供する。
【解決手段】ブリッジ回路11、12は、被検出部87の回転に応じて変化する回転磁界によりインピーダンスが変化するセンサ素子21〜28により構成されるハーフブリッジ14〜17を有する。信号取得手段は、ハーフブリッジ14〜17の中点31〜34から出力される出力信号をハーフブリッジ14〜17ごとに取得する。回転角算出手段は、信号取得手段により取得された出力信号に基づき、被検出の回転角度θを算出する。異常特定手段は、信号取得手段によって取得される少なくとも4つの出力信号に基づく値である演算値が所定の範囲から外れた場合、当該演算値に対応する出力信号を異常出力信号として特定する。これにより、故障などによりどの出力信号が異常となったかを特定することができる。
(もっと読む)
ポインティングデバイス
【課題】従来よりも小型で薄型であり、複雑な補正用ソフトウェアを作成することなく、高い操作感を備えた磁気検出式ポインティングデバイスを提供すること。
【解決手段】磁石103を備えた平行に揺動可能な操作部材と、操作部材の所定の方向への移動を検出するセンサ101a乃至101dと、センサのセンサ出力を信号処理する信号処理部104と、信号処理部104の信号処理の結果を出力する出力制御部108とを有している。磁石は、ホールセンサを実装した平面において直交するX軸方向及びY軸方向の長さよりも傾斜軸方向の長さが大きい形状を有している。
(もっと読む)
位置検出回路及びぶれ補正装置
【課題】基準電圧に起因する位置検出誤差をなくし、より高精度な位置検出結果を得ることができる位置検出回路及びぶれ補正装置を提供する。
【解決手段】バイアス出力生成部203a、203bは、ホール素子201a、201bから出力された信号に対して、基準電圧生成部202が生成する基準電圧に基づくバイアスをかけた信号を出力する。位置演算部200は、バイアス出力生成部203a、203bから出力された信号に基づいて、磁界発生部とホール素子201a、201bとの相対的な位置関係を示す信号であって、基準電圧に由来する成分を除去した信号を出力する。
(もっと読む)
位置検出装置
【課題】磁石及び磁気センサの特性のバラツキや組立精度の影響を抑えながら、回路規模が小さく、低消費電流による駆動を実現する。
【解決手段】位置検出装置は、2個の磁気センサ11a,11bが互いに離間されて配置される少なくとも1つの磁気センサ対と、磁気センサ対に対して移動自在又は傾斜自在に配設される磁石10と、各磁気センサ11a,11bの出力電圧を電流に変換するV/I変換回路12と、V/I変換回路12が変換した各電流I1,I2を基に、差電流(I1−I2)を生成する減算回路13と、V/I変換回路12が変換した各電流I1,I2を基に、和電流(I1+I2)を生成する加算回路14と、差電流(I1−I2)を和電流(I1+I2)で除算する電流除算回路15と、電流除算回路15が除算して得た値を位置信号Voとして出力する出力回路16と、を備える。
(もっと読む)
位置検出装置
【課題】少ない数の磁気センサと単純構造のマグネットを用いてレバーの操作位置を検出できる位置検出装置を提供する。
【解決手段】シフトレバー1の操作に伴って回路基板9と平行な同一平面内を移動するホルダ7に円板状のマグネット8を固着し、回路基板9に一対の磁気センサ10(10A,10B)を実装する。マグネット8は一方の主面をN極、他方の主面をS極に着磁してあり、磁気センサ10は、非磁性材料からなる基台20の表面層に設けられた軟磁性体層22と、この軟磁性体層22の外縁部近傍に配置された少なくとも2つのホールIC21とを有し、これらのホールIC21が軟磁性体22の中心を原点とするX−Y直交座標上に配置された構成となっている。これにより、磁気センサ10のペアで検出されたホール電圧に基づいてマグネット8の磁束のX軸に対する方向(角度)を検出でき、その検出結果に基づいてシフトレバー1の複数のシフト位置を検出することができる。
(もっと読む)
エンコーダおよび信号処理方法
【課題】磁気検出素子の出力にバラツキがある場合でも、検出精度を向上させ、高精度を有するエンコーダを提供する。
【解決手段】エンコーダが、第1の絶対位置エンコーダから入力された第1の検出信号に基づいて入力軸の角度位置を示す第1の位置データを検出する第1の位置データ検出回路と、第2の絶対位置エンコーダから入力された第2の検出信号に基づいて出力軸の角度位置を示す第2の位置データを検出する第2の位置データ検出回路と、第1の位置データと第2の位置データとを合成して、入力軸の多回転量とともに1回転内の角度位置を示す合成位置データを生成する位置データ合成回路と、を備え、前記第1の絶対位置エンコーダまたは前記第2の絶対位置エンコーダは、前記入力軸又は前記出力軸の回転にともない回転する回転子と前記回転子の周囲に配置される複数の磁気検出素子とを有する磁気式エンコーダである。
(もっと読む)
21 - 40 / 110
[ Back to top ]