
Fターム[2F063DD05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器の組み合せ (1,287) | 同一種類の検出器を用いるもの (1,165) | 4個、2対の検出器 (110)
Fターム[2F063DD05]に分類される特許
61 - 80 / 110
座標検出装置及び座標検出方法
【課題】二点接触における位置検出が可能な座標検出装置を提供する。
【解決手段】絶縁体からなる四角形状の基板上に形成された抵抗膜と、抵抗膜に電圧を印加するための電源と、電源と接続されている四隅の抵抗膜上に設けられた4個の電極と、電源と各々の電極との間に設けられた4個のスイッチと、各々の電極に流れる電流を測定するための4個の電流測定器と、抵抗膜と接触させることにより抵抗膜における接触位置座標を検出するため接地されている導電膜を有し、スイッチの開閉を行うことにより、4個の電極に順次電圧を印加し、抵抗膜と前記導電膜と接触させ、電極に接続されている4個の電流測定器により順次各々の電流値を測定し、各々の電流値に基づき得られた抵抗値により、各々の電極と抵抗膜と導電膜との接触位置を検出することを特徴とする座標検出装置を提供することにより上記課題を解決する。
(もっと読む)
回転角度検出装置および回転機

【課題】回転角度の検出精度が高い回転角度検出装置および回転機を提供する。
【解決手段】N極対の磁極を有する磁石回転子(但し、Nは2以上の整数である。)と、前記磁石回転子から印加される磁束に応じて磁石回転子の回転角度を検出するための2個のホールセンサとを備え、 前記2個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した周方向用ホールセンサとで構成され、
前記径方向用ホールセンサが受ける磁束密度成分の振幅と前記周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、前記径方向用ホールセンサ及び前記周方向用ホールセンサが配置されていることを特徴とする回転角度検出装置。
(もっと読む)
シャフト型リニアモータの位置検出装置
【課題】予め作成された補正データテーブルを用いて、可動子の検出位置を補正するにあたり、補正データテーブルとの同期化を容易にする。
【解決手段】可動子3を直線的に駆動させるシャフト型リニアモータ1の位置検出装置4であって、可動子3に設けられる磁気センサSと、磁気センサSが検出したシャフト2の磁束に基づいて可動子3の位置を検出すると共に、予め作成された補正データテーブルを用いて、可動子3の検出位置を補正するにあたり、可動子3の原点位置を認識し、補正データテーブルとの同期化を行う必要があるが、原点位置は、予め作成された原点データに基づいて特定される電気原点とし、磁気センサSの検出信号から得られる検出データが原点データに一致したとき、現在の可動子位置を原点位置として認識する。
(もっと読む)
回転情報算出装置、ステアリング装置及び電動パワーステアリング装置
【課題】3相の磁気検出器の磁気検出信号の異常を検出することが可能であり、異常発生後も、3相中の2相の磁気検出信号が正常な場合に、継続して回転情報の計算を正確に行うことが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号のサンプリング値a、b、cを取得し、取得したサンプリング値に基づいて、各相に対する回転角度位置を算出する。そして、これら算出した回転角度位置に基づき各相のサンプリング値の異常を検出するとともに、1相のサンプリング値のみに異常が検出されたときは、異常検出フラグを出力すると共に残りの2相のサンプリング値で回転角度位置の算出を行う。2相以上のサンプリング値の異常が検出されたときは、回転情報算出装置の動作を停止する。また、正常な相のサンプリング値に基づいて算出した回転角度位置の平均値を出力用の回転角度位置として算出する。
(もっと読む)
渦電流式試料測定方法と渦電流センサ
【課題】 試料に印加する交流磁界の発生磁束が磁心全般に広がるため検知される空間分解能(測定分解能)が低下する。
【解決手段】 磁心が磁気特性に加えて誘電特性が顕著となる材料製である渦電流センサを使用し、磁気及び誘電特性の複合作用によって生ずる磁心内部の電磁波が定在波となる周波数(寸法共鳴が生ずる周波数)又はその近傍の周波数で前記渦電流センサを作動させて(磁心を励磁して)定在波の山の部分に磁束を集中させて、その磁界(磁束断面積)を磁心の磁路断面積より小さくし、その磁束を渦電流センサの磁心に与えるようにした。渦電流センサの磁心を、磁気特性に加えて誘電特性が顕著となる材料製として、励磁時の磁気及び誘電特性の複合作用によって生ずる磁心内部の電磁波が定在波となる周波数で作動させると、発生磁束が定在波の山の部分に集中するようにした。磁心材料をMn−Znフェライトとすることができる。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、誤差がなく、確実な検出が可能なものを提供することを目的とする。
【解決手段】四つの磁気抵抗19が略矩形状に接続された磁気抵抗素子17や18を、第一の検出体2や第二の検出体3中央の磁石4や5に対向配置すると共に、磁気抵抗素子17や18と制御手段32の間にスイッチング手段21〜24を設け、このスイッチング手段21〜24を制御手段32が切換え、一つのホイートストンブリッジから形成された磁気抵抗素子17や18からの正弦波と余弦波の出力信号によって、回転角度の検出を行うことによって、使用される周囲温度に係わりなく、誤差のない確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
渦電流式試料測定方法と、渦電流センサと、渦電流式試料測定システム
【課題】 フェライトコアに巻かれた励磁コイルと交流電源の間に接続されるリード線のインダクタンス及び抵抗成分の影響を受けて、励磁コイルに供給される交流電圧を一定に保つことが出来ず測定誤差の要因となっている。
【解決手段】 渦電流センサの磁心に交流磁界を発生させる励磁コイルとは別に電圧検出コイルを設け、渦電流発生時の電圧検出コイルの誘起電圧を検出コイルのインピーダンスに対して高入力インピーダンスである検出器で検出する。前記検出器で検出された検出電圧で励磁コイルに印加する高周波電圧を制御する。測定用渦電流センサと試料を測定しない非測定用渦電流センサを使用し、夫々の渦電流センサの磁心に励磁コイルとは別に設けた電圧検出コイルを夫々の誘起電圧が逆方向となるように直列接続し、非測定用渦電流センサの検出コイルの誘起電圧と、試料測定した測定用渦電流センサの検出コイルの誘起電圧との電圧差を前記直列接続した電圧検出コイルの測定端子で検出するようにした。
(もっと読む)
タッチセンサおよびタッチセンサの制御方法、並びにプログラム
【課題】少ない静電容量センサの数で、静電容量センサが配置された接触領域のうち、物体が接触または近接した位置を連続的な値により高い精度で検出する。
【解決手段】強度取得部12は、静電容量センサ21−1乃至21−4により検出された静電容量の変化の強度を、第1象限乃至第4象限に対して環状に配置したときの検出結果として取得する。水平方向計算部31は、第1象限と第4象限の検出結果との和より、第2象限と第3象限の検出結果との和を減算して、物体が接触または近接した位置の水平方向の検出位置を計算する。垂直方向計算部32は、第1象限と第2象限の検出結果との和より、第3象限と第4象限の検出結果との和を減算して、物体が接触または近接した位置の垂直方向の検出位置を計算する。位置出力部14は、物体が接触または近接した位置の水平方向および垂直方向の位置を出力する。本発明は、タッチセンサに適用することができる。
(もっと読む)
センサ付き転がり軸受装置
【課題】変位や、回転速度等の物理量を検出するセンサを有すると共に、コンパクトなセンサ付き転がり軸受装置を提供すること。
【解決手段】ターゲット部材が貫通している貫通穴89を有する環状かつ平板状の第1部分81と、この第1部分81に交差する平板状の第2部分82とを有する基板90の第1部分81に、貫通穴89を全周に亘って取り巻くように、第1コイル92を配置する。また、上記第2部分82に平面状の第2コイル92を配置する。第1部分81および第2部分82の夫々を、ポリイミド樹脂で構成し、第1コイル91を、第1部分81の内部に配置し、第2コイル92を、第2部分82の内部に配置する。
(もっと読む)
ポジションセンサ
【課題】非接触によって、安定して2次元のポジションを検出することができるポジションセンサを提供する。
【解決手段】レバー10に設けられたカウンター磁石2と、バイアス磁界を発生するバイアス磁石4と、感磁方向が直交する第1及び第2のMR素子35、36からなるハーフブリッジ回路を十字の各頂点に第1〜第4のハーフブリッジ31〜34としてそれぞれ配置し、傾倒操作に基づくバイアス磁界の方向の変化に基づいて、対向する第1及び第3のハーフブリッジ31、33から出力電圧V1、V3、及び対向する第2及び第4のハーフブリッジ32、34から出力電圧V2、V4、を出力するMRセンサ3と、MRセンサ3から出力された出力電圧V1〜V4に基づいて傾倒操作によって指示された2次元のポジションを判断する判断部5と、を備えることを特徴とするジョイスティック1を提供する。
(もっと読む)
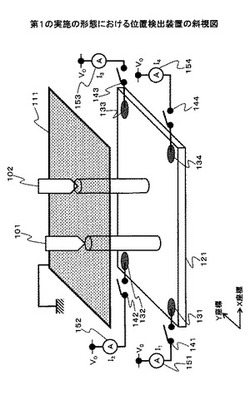
容量性タイプの近接センサ
検知電極を有する容量タイプの近接センサが提供される。検知電極は、導電領域113及び非導電領域117をもつ表面を有し、センサは、検知電極と対象109、111との間の電界110、112を測定するように適応される。更に、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のための装置、医用X線診断及び/又はX線治療及び/又は核診断/治療(例えばSPECT)のためのシステム、医用X線診断及び/又はX線治療及び/又は核診断/治療のための装置(例えばSPECT)と対象との間の衝突を回避する方法、プログラム要素及びコンピュータ可読媒体が記述される。接近する対象の感度がセンサ自体の特別なジオメトリからの改善された独立性を有する容量タイプの近接センサが開示される。 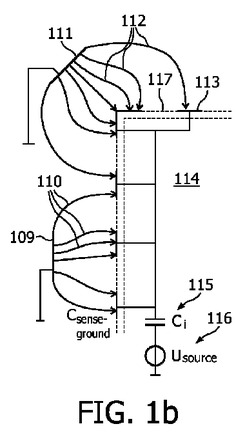 (もっと読む)
(もっと読む)
無人飛行ビークルの飛行中燃料給油方法およびシステム
無人飛行ビークルに燃料給油するためのシステムおよび方法である。システムは第2の無人飛行ビークルから第1の無人飛行ビークルに燃料給油するように構成されており、予め定められた距離内で近接して第1および第2のビークルを飛行し、飛行中に第2のビークルから第1のビークルへ燃料供給ラインで接続するための構成を含んでいる。示されている実施形態では、接続のための構成は第1のビークル上の燃料給油レセプタクルを電磁的に検出する標的システムを含んでいる。追尾装置が第2のビークル上の前記燃料供給ラインの第1の端部に配置されている。追尾装置は第1のビークル上のレセプタクル周囲の第1のコイルからの磁気信号を検出するように適合された3つの検出器コイルを含んでいる。コイルが取付けられ、それによって検出器コイルは異なる方向で指向する。コイルの出力はタンカーのUAVからのUAVまでの方向と距離を決定するために処理される。 (もっと読む)
回転角度検出装置
【課題】低コストでコンパクトな構成をとりつつ、複数回転の回転角度を検出可能な回転角度検出装置を提供する。
【解決手段】回転体5の回転角度を検出する回転角度検出装置1であって、磁石2と、互いに直交するX軸・Y軸・Z軸の3方向の磁場成分の大きさを検出可能な磁場検出手段3とを備え、回転体5の回転に伴って、磁石2又は磁場検出手段3が、Z軸に平行な周回軸の周りを周回するとともに、周回に応じて磁石2と磁場検出手段3の相対変位のZ軸成分が増減するように構成する。
(もっと読む)
原点検出装置
【課題】 特に、固定磁性層及びフリー磁性層を有する磁気抵抗効果素子を用いて、従来に比べて高精度に原点検出を行えるようにした原点検出装置を提供することを目的としている。
【解決手段】 磁石1の中心1cが原点検出範囲にあるとき、各磁気抵抗効果素子のフリー磁性層には水平磁場成分H1が作用するためフリー磁性層をその水平磁場方向に向かせることができ、磁化を安定化でき、ヒステリシスを十分に小さくでき、高精度な原点検出を行うことができる。そして前記磁石1の中心1cが、原点検出範囲にあるとき、差動出力が生じ、前記原点検出範囲から離れると、差動出力がゼロになるため、差動出力の有無の判断により、原点検出を行うことができ、基準電圧設定回路が必要でない等、簡単な回路構成で、高精度な原点検出を行うことが可能である。
(もっと読む)
位置検出装置
【課題】1つの磁気センサが故障しても、故障する以前と同じ数の位置検出が可能な位置検出装置を提供する。
【解決手段】第1〜4のMRセンサ131A〜131Dは、バイアスマグネット132Bによるバイアス磁界が付加されている。第1〜4のMRセンサ131A〜131Dは、カウンターマグネット132Aの位置に基づいて出力された出力電圧をしきい値141に基づいて「H」と「L」の出力信号に分け、ECU14は、その「H」と「L」の組合せによって、カウンターマグネット132Aの位置を判断する。
(もっと読む)
小動物の位置測定システム
【課題】1Kg程度の飼育ケース内に存在する10〜30g程度と軽量な小動物の位置情報を、安価に収集するシステムを提供する
【解決手段】重心の変化を求める荷重計とは別に、重量を支える支柱2を用意することにより、広いダイナミックレンジの荷重計を用いる必要が無くなり、システムを低コストで提供することが可能となる。安価なシステムを提供できれば、これまで容易に評価できなかった開発機関でも導入がすすみ、より多くの研究者が積極的に研究できる体制を整備することが可能となる。また、医薬品や機能性食品等の研究開発における学術レベルの向上に貢献できる。
(もっと読む)
磁気検出方法およびその装置
【課題】実装ズレがあった場合に磁気検出の誤差を低減する、2次元平面上での磁気検出方法およびその装置を提供すること。
【解決手段】本発明に係る磁気検出方法の実施形態では、x軸上の1対のホール素子301、302の出力信号から算出される検出信号を、磁石のx座標の関数として直線補間して、傾きa、切片bを求める。次に、y軸上の1対のホール素子303、304の出力信号から算出される検出信号を、磁石のx座標の関数として直線補間して、傾きc、切片dを求める。次に、1対のホール素子301、302の出力信号から算出される検出信号を、磁石のy座標の関数として直線補間して、傾きe、切片fを求める。次に、1対のホール素子303、304の出力信号から算出される検出信号を、磁石のy座標の関数として直線補間して、傾きg、切片hを求める。これらのパラメータを用いて、予め定めた数式により磁石の検出位置を算出して磁気検出を行う。
(もっと読む)
センサ付き転がり軸受装置の製造方法
【課題】センサ付き転がり軸受装置の位置や、センサ付き転がり軸受装置に加わっているモーメント荷重の大きさを、精密に測定することができるセンサ付き転がり軸受装置を製造するセンサ付き転がり軸受装置の製造方法を提供すること。
【解決手段】内軸1、内輪2、外輪3、第1の玉4および第2の玉5を組み付ける。その後、内輪2の外周面の軸方向の一端部に、ターゲット部材61の軸方向の一端部を圧入すると共に、外輪3と内輪2との間のターゲット部材61側の開口を、シールド板7で密封する。この状態で、内軸1を、略内軸1の中心軸の回りに回転させた上で、ターゲット部材61の外周面を加工する。
(もっと読む)
多回転絶対角検出装置
【課題】360度以上の角度範囲内の絶対角度を高精度に検出可能な多回転絶対角検出装置を提供する。
【解決手段】機構部に、回転体1と、回転体1に従動する従動回転部材2と、従動回転部材2に従動して間欠的に回転する間欠回転部材3と、従動回転部材2に取り付けられた磁石4と、磁石4と対向に配置され、従動回転部材2の1回転を1周期とする正弦信号及び余弦信号を出力する磁気センサ5と、間欠回転部材3に形成された第1及び第2のコードパターン6,7と、これらの各コードパターン6,7に対向して配置された第1乃至第7の検出素子8〜14とを含む。検出素子8〜14の出力信号に基づいて回転体1の1回転を等分するセクタを識別し、正弦信号及び余弦信号から算出される逆正接値に基づいてセクタ内の絶対角を検出する。回転体1と従動回転部材2との間に、中間回転部材23を配置することもできる。
(もっと読む)
脚式移動型ロボット
【課題】床面までの距離を正確に測定することができる脚式移動型ロボットを提供すること。
【解決手段】本発明の一態様にかかる脚式移動型ロボットは、脚部によって床面を移動する脚式移動型ロボットであって、脚部10に設けられた足平本体部40と、足平本体部40に対して摺動可能に取り付けられ、足平本体部40の底面よりも床面側に突出する可動部51と、可動部51の摺動位置を検出する変位センサ57と、可動部51が足平本体部40の足裏面40aに近づく方向の摺動端において、可動部51の下端が足平本体部40よりも床面側に突出するよう、可動部51の摺動範囲を規制する係止部59と、を備えるものである。
(もっと読む)
61 - 80 / 110
[ Back to top ]