
Fターム[2F065AA06]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸方向;距離 (1,861)
Fターム[2F065AA06]に分類される特許
1,821 - 1,840 / 1,861
光学測定装置及び光ピックアップレンズ調整装置

【課題】 装置の大型化を防止しつつ、光ピックアップレンズの位置測定等の可能な光学測定装置及び光ピックアップレンズ調整装置を提供する。
【解決手段】 レーザ光源22からの平行光がレンズW上に照射されることにより正反射した光を、ビームスプリッタ24により角度測定用正反射光L1と位置測定用正反射光L2とに分岐させ、角度測定用正反射光L1を収束レンズ25により収束して角度測定用撮像手段27の撮像面27Aに集光させるとともに、位置測定用正反射光L2を収束レンズ25を介さずに位置測定用撮像手段28の撮像面28Aに照射させ、角度測定用撮像手段27の撮像面27Aにおける集光位置に基づいてレンズWの傾きを測定するとともに、測定されたレンズWの傾き及び位置測定用撮像手段28の撮像面28Aにおける照射位置に基づいてレンズWの位置を測定する。
(もっと読む)
レンジ検査のための測定装置および方法
本発明は、レンジデータの取得および解析を用いて物体(1)の3次元の特性を測定するための画像化装置および方法に関する。画像化装置は、測定開始前に、レンジデータの取得および解析を構成するための手段と、画素を含む少なくとも1つのセンサ(5)を用いて上記の物体(1)の画像からの反射光を検出することによって、上記の物体(1)の画像を作成するための手段と、センサの画素単位で測定された作成画像から上記の物体(1)のレンジデータを取得するための手段と、取得したレンジデータをセンサの画素値から世界座標に較正するための手段と、レンジデータを一様に離隔されたグリッドに再サンプリングすることによって、較正されたレンジデータを矯正するための手段と、較正および矯正の施されたレンジデータを解析して、上記の物体(1)の3次元の特性を得るための手段と、を備える。  (もっと読む)
(もっと読む)
位置決め装置及び露光装置

【課題】 雰囲気温度の変動に伴う反射面の形状変化や可動部の加減速に伴う反射鏡の傾きを有効に防止して計測誤差を小さくする。
【解決手段】 移動可能な試料台50と、試料台50の位置又は姿勢を測定する干渉計システムと、試料台50に固定され干渉計システムから射出された計測光を反射する反射面を備えた反射鏡100とを有し、反射鏡100は、干渉計システムから射出された第1計測光を反射する第1反射面103と、第1反射面103に垂直であり且つ干渉計システムから射出された第2計測光を反射する第2反射面104とを備えた第1部材101と、第1部材101の第1反射面103と反対側の面に突出するように第1部材101と一体的に設けられ、且つ第2反射面104に実質的に平行であり試料台50に当接固定される取付面105を備えた第2部材102とを含んで構成される。
(もっと読む)
人体検知装置及び衛生洗浄装置
【課題】 本発明の課題は、発光素子の経年劣化に影響を与えることなく発光量を補正する人体検知装置を提供する。
【解決手段】 本発明では、被検出体からの反射光を受光レンズで集光させて受光する一次元位置検出素子と、前記一次元位置検出素子から検出される長手方向の両端より検出する電流比で被検出体までの距離を演算する距離演算手段とを備えた人体検知装置において、前記一次元位置検出素子の両端より検出する総電流量を測定する総電流量検出手段と、前記発光素子の周囲温度を検出する温度検出手段と前記発光素子の駆動電流量を可変する駆動電流設定手段とを有するとともに、前記駆動電流設定手段は、前記距離演算手段と前記総電流量検出手段と前記温度検出手段の出力を参照し、前記発光素子の駆動電流量を可変する。
(もっと読む)
光学式変位計
【課題】発光素子の発光量や増幅器の増幅率のフィードバック制御を行うことの利点を残しながら、計測の高速化に対応可能な光学式変位計を提供する。
【解決手段】光学式変位計は、対象物に光を照射するための発光素子と、対象物からの光を受光して画像信号を生成するためのイメージセンサーと、イメージセンサーからの画像信号を増幅する増幅器を含む信号処理回路と、信号処理回路からの画像信号に基づいて発光素子の発光量及び増幅器の増幅率を含む操作量の少なくとも一つのフィードバック制御を実行する制御部とを備え、フィードバック制御における操作量の少なくとも一つの可変幅が変更設定可能である。制御部は、可変幅設定モードにおいて所定期間の操作量のデータに基づいて操作量の適切な可変幅を設定する。
(もっと読む)
被写体位置検出装置、被写体位置検出方法およびこの方法のプログラム
【課題】外乱光の影響や他の被写体による隠蔽があっても被写体の検出処理対象部分位置を正確に検出できる。
【解決手段】測距装置1は被写体(人物)までの距離を画素毎に表す距離画像を生成し、距離データ入力部3は頭部の距離値を取り込む。パラメータ算出部4は、頭部モデルのパラメータの値推定と各距離値とのユークリッド距離からパラメータ値の推定誤差を算出する。一致判定部5は、パラメータ値を変換した検査値とその正解値と推定誤差を用い一致判定値を算出し、これと閾値からモデルが頭部と一致する場合にパラメータ値を変換して頭部位置とする。
推定誤差の算出、例外値を確率計算に利用することも含む。
(もっと読む)
物体の光学的測定を行うための装置及びその装置を用いた測定方法
【課題】フォーカス調整装置を備える顕微鏡と光波干渉計とを備えた光学的測定装置においてより高い精度の測定が実現すること。
【解決手段】 顕微鏡が共焦点オートフォーカス顕微鏡として形成されるとともに、光源から発したフォーカスビームが対物レンズ12を経て物体1とフォーカス検出器8とにフォーカスされるとともに、フォーカス調整装置18とフォーカス検出器8とに連携しているフォーカス制御装置17に前記フォーカス検出器8が測定信号を出力することで、この測定信号に応じてフォーカス制御装置17が物体1の測定点が対物レンズ12の焦点に位置するようにフォーカス調整装置18を制御するように構成され、かつ光波干渉計はフォーカスビームをつくり出すための光源である。
(もっと読む)
車両の側方周囲の、ビデオベースの監視及び測定のための方法及び装置
初期の市販の運転者支援システムにおいては、適用形態により、走査の解像度と走査される領域の大きさのどちらを重要視するかを考える必要がある。従来のビデオベースのシステムは、解像度と記録範囲の両方を十分兼ね備えてはいるが、一般に、直接の距離情報を供給しない。本発明の目的を有する新規な設備によれば、路上走行車内に設置した場合には、複雑かつダイナミックな場面、たとえば、ダイナミックに動作している車両の視点から、道路の縁に対する側方の3D幾何学的形状を記録し、駐車する際にこれを利用することができるシステムを実現することができる。本発明によれば、車両の側方周囲の監視及び測定は、一方では、ディジタル画像を備えたカメラにより、他方では、画像にタイムスタンプを提供し、かつこれをバッファ処理するよう機能するコンピュータユニットにより表示される。車両の移動は、上記のデータに基づいて、バッファ処理された画像から画像の対を選択するために、さらに記録される。したがって、車両の側方周囲の局所3D深さ画像が、立体画像処理用のアルゴリズムによって生成できる。 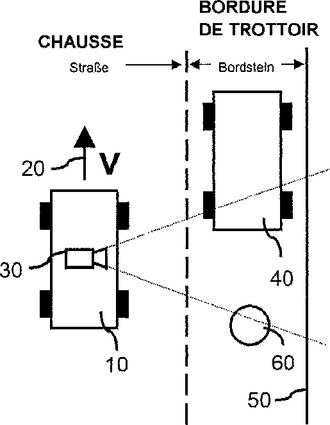 (もっと読む)
(もっと読む)
時間相関検出型イメージセンサおよび画像解析方法
【課題】 時間分解能の制限から従来不可能であった種々の画像解析を可能とする。
【解決手段】 入力フォトンを電流に変換するフォトダイオードFD、入力された外部電気信号Sに応じてフォトダイオードFDにより発生した電流を変調するトランジスタ対、およびトランジスタ対により変調された電流を時間積分するコンデンサCを有する複数の受光素子を備え、複数の受光素子を走査して各コンデンサCの積分値を順次読み出す。
(もっと読む)
位置決めステージ装置
【課題】 本発明は、高速化に伴う移動ステージの温度変動によって生じる制御位置精度の悪化を、高精度に補正する位置決めステージ装置を得ることを目的とする。
【解決手段】 定盤4のガイドに沿って所定の方向に往復移動自在である移動ステージ2と、移動ステージ2を駆動させるリニアモーター3と、前記移動ステージ2と一体であるミラー5の反射光に基づいて移動ステージの現在位置を検出するレーザー干渉計6を有し、さらに、移動ステージの駆動の履歴を記憶する記憶手段と、予め求めた補正式と前記記憶手段に記憶させたデータから移動ステージのその時点での補正量を算出する演算手段と、前記レーザー干渉計6の出力及び前記演算手段の出力に基づいて前記リニアモーターの駆動量を制御する制御手段を有することを特徴とする。
(もっと読む)
面法線計測方法及びその装置
【課題】
離れた位置にある小領域対象面の面法線を計測する方法及び装置を提供する。
【解決手段】
互いの両端面を平行に組み合わせて中間に一定の隙間を有する2枚のウェッジプリズム11a、11bを用い、光ビームの入射光91を平行にシフトするためのビームシフト光学系1を構成し、これを角度可変アクチュエータ41により一体で回転させ照射位置を可変とし、小領域中の少なくとも3点94a、94b、94cに光ビームを照射して得られる距離データを基に法線演算回路51で法線を算出することにより、離れた位置にある対象面の面法線を計測する方法及びその装置を提供する。
(もっと読む)
露光方法及び露光装置、並びにデバイス製造方法
【課題】 マーク計測用の観察系の一部の移動に関わる時間の短縮化を図り、スループットの向上を図ることが可能な露光方法及び露光装置を提供する。
【解決手段】 観察系22A,22Bは、計測用の計測位置Paと、計測位置から離れた退避位置Pbとの間を移動自在な移動部材30A,30Bを含み、移動部材30A,30Bを計測位置Paと退避位置Pbとの間で移動させる。照明光ILの照射により基板上に転写されるべきマスクR上での被照射領域に関する情報に基づいて、移動部材30A,30Bの退避移動時における移動距離を算出する。
(もっと読む)
レーザ干渉式変位測定装置
【課題】レーザ光の干渉信号に基づいて微小変位を測定する場合でも、検出信号系の調整を容易且つ高精度に実現する。
【解決手段】入射されるレーザ光線を分割し、一方を光路長が変化しない参照光L2とし、他方を被測定体5の表面で反射させることにより該表面までの距離に応じて光路長が変化する測定光L1とすると共に、該測定光L1と前記参照光L2との干渉光から取得される正弦波信号に基づいて、前記被測定体表面の変位を測定するレーザ干渉式変位測定装置において、前記測定光L1の光路長を強制的に変化させる光路長変更手段として、該測定光を基準位置で被測定体方向に反射させる反射鏡46を、同方向に進退動させるPZT(圧電素子)49を設置した。
(もっと読む)
アイテムの選択セグメントの体積に対応する数値表示を示すための装置及び方法
【解決手段】アイテムの未切断選択セグメントの重量又は価格を表示する装置及び方法は、位置指示部材を、支持面上に位置するアイテム上方を通過させることを含む。位置指示部材は、一つ以上のセンサを有し、そのセンサが、上記部材が基準位置からアイテム上方の選択された他の位置まで横断される際に、アイテムの連続する横断面輪郭に対応し、アイテムの選択セグメントを規定する信号を生成する。同時に、好ましくは一つ以上の微小構造電子機器(MEMS)加速度計装置から構成された作動検出器配置構造は、アイテムに沿って位置指示器支持部材が移動したときにその作動に対応する信号を生成する。これらの信号は、指示部材の選択された連続位置間に位置するアイテムの未切断選択セグメントの体積を決定すべく、信号処理装置で処理される。これらの累積的な体積決定のそれぞれは、数値重量に変換される、又は、特定のセグメントをアイテムから切断する前に、重量又は価格の情報が見ている顧客に同時に提供される。可視光帯は、センサ・バーからアイテムの特定のタイプの密度要素に基づく部分価格値上に投影され、それにより、部材が上記アイテムに沿って横断されたときに数値的な重量又は(重量に基づく)価格値が表示され、したがってアイテムのオペレータが数値表示に対応する選択セグメントの境界を観察者に明確に示すことが可能となる。 (もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 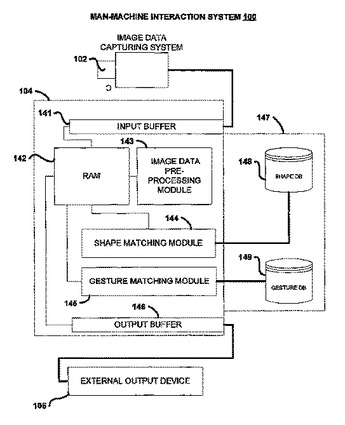 (もっと読む)
(もっと読む)
光プローブチップを有する測定装置
加工物の形状、輪郭および/または粗さを測定するための測定装置(1)は、大きな開口数を有する非接触光プローブに基づいている。プローブは、少なくとも2つの光受容体が関連付けられる少なくとも2つの異なる焦点を有する。2つの光受容体は、加工物表面がプローブの測定範囲内に維持されるように、光プローブを追跡するための位置決め装置(13)を制御するための差分信号を生成する。差分信号は、センサ器具(3)の位置の高速かつ正確な追跡をもたらすことが分かっている。  (もっと読む)
(もっと読む)
人の視覚挙動を決定するための方法と装置、並びに眼鏡用レンズのカスタマイズ法
本発明は人の視覚挙動を決定するための方法と装置に関する。本発明の方法は、次のステップ、即ち、被験者の頭部の動きを記録するステップ、被験者の眼球運動を記録するステップ、頭部に対する眼の相対的方位を決定するステップ、及び眼球が各方位に維持されていた時間の量を決定するステップを含む。上記時間の量は、有限区間内の方位の記録を収集し、各区間内の記録の数(頻度)を計数することによって求められる。前記方位は、頭部と眼球の両方に対して角座標を用いて特定される。データは、頭部に固定される発光素子(51)、カメラ(63)及び被験者の視線を引き付けるためのスクリーン(611、612)を備えたデバイスの援助により検知及び処理される。本方法から得られる結果は、眼鏡用レンズの設計をカスタマイズするために用いられる。
 (もっと読む)
(もっと読む)
光学干渉計システムおよび光学干渉計システムを用いる方法
総じて、一態様では、本発明は、干渉部品と測定物体との間の距離を、3本の異なる測定軸の各々に沿って、測定物体を光学干渉部品に対して移動させながら、干渉法を利用して監視するステップと、測定物体の監視距離からの異なる位置に対する第1パラメータおよび第2パラメータの値を決定するステップであって、所与の位置に対して、第1パラメータは、所与の位置において3本の異なる測定軸の各々に沿った測定物体の監視距離に基づき、所与の位置に対して、第2パラメータは、所与の位置において測定軸の内2本の各々に沿った測定物体の監視距離に基づく、ステップと、第1および第2パラメータ値から測定物体の表面形状プロファイルに関する情報を導出するステップとを含む方法を特徴とする。  (もっと読む)
(もっと読む)
共焦点顕微鏡法の原理に基づく測定装置および方法
光源(1)と、ビームを制限するための絞り構造(3)と、光源から放射されて絞り構造を通過する光(5)を測定すべき物体(6)に収束させるための結像光学系(4)と、物体に当たって後方散乱してから同じ絞り構造または観察光路(7)に配置された別の絞り構造を通過する光(5)に対する受信光学系(10)と、2つの放射感度のあるセンサ素子(13、14)を備える画像受信機(10)とが含まれる。高さ情報を含んだ測定撮影を生成するために、光路の光学距離変更手段(11)が、一方の光源(1)および/または画像受信機(10)と他方の物体(6)との間に配置され、焦点の光学距離(d)を所定の方法で変更可能である。露光時間(T)中における観察光路(7)の光強度に対する、2つのセンサ素子(13、14)での電荷の蓄積量(Q13、Q14)と、結像光学系(4)から画像平面までの光学距離(d)との関連を成立させる。 (もっと読む)
深度情報を含む画像の生成方法と装置
深度情報を含む画像を生成する方法と装置が提供される。この方法では、場面から発する放射を検出し、異なる面における場面の少なくとも2つの画像を形成する。各画像は強度データ値のセットを有する。データ値の変動が得られ、強度分散の2つのセットがデータ値から得られ、強度分散データは深度情報を得るために処理される。深度情報は、画像データにおける異なる深度情報を識別するためにコード化される。
 (もっと読む)
(もっと読む)
1,821 - 1,840 / 1,861
[ Back to top ]