
Fターム[2F065AA06]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸方向;距離 (1,861)
Fターム[2F065AA06]に分類される特許
1,841 - 1,860 / 1,861
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
製造物の位置決めシステム
製造物の位置決めシステムであって、製造物を支持するチャック(71)、当該チャックを支持する中間台(79)及び当該中間台(79)を支持する固定ベース(72)を有するシステム。チャック(71)は中間台(79)に対して第1方向X(80)を移動することが可能で、中間台(79)は当該固定ベース(72)に対して第2方向Y(81)を移動することが可能である。システムはさらに固定ベース(72)に対するチャック(71)の位置を測定する少なくとも1つのレーザー干渉計(73,74,75,76,77,78)を有する。当該レーザー干渉計の主部(73,74,75,76,77,78)は、チャック(71)上の反射体(83,84,85)と固定ベース(72)上の反射体(82,87)との距離を測定することが可能なように、当該中間台(79)に取り付けられている。  (もっと読む)
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
多軸干渉計ならびに多軸干渉計を用いる方法およびシステム
一般的に、一態様において、本発明を特徴付ける装置は、少なくとも3本の出力ビームを生成するように構成された多軸干渉計を含む。各出力ビームは、対応する測定軸に沿っての干渉計と測定物体との間の距離についての干渉分光情報を含み、少なくとも3本の測定軸は共通面内にあり、各出力ビームは、共通のビーム経路に沿って測定物体までの光路を形成する成分を含む。  (もっと読む)
(もっと読む)
表面の形状を測定する装置および方法
本発明は、床などの硬質または半硬質基板上で用いるための表面形状測定装置を提供する。本装置は、(a)ビームと、(b)ビームに装着される少なくとも1つのビームサポートと、(c)該ビームに摺動可能に接続され、かつ表面までの距離を測定するように構成されるセンサアセンブリと、(d)該ビームに沿って該センサアセンブリの位置を測定するように構成される変換器アセンブリとを含む。  (もっと読む)
(もっと読む)
ベルト特性検出方法、及び、ベルト特性検出装置
製品タイヤの品質管理を高めることができるベルト特性検出方法、及び、ベルト特性検出装置を提供することを課題とする。
ベルト特性検出装置は、ドラム21上に貼付されたベルト22の特性を検出する装置であり、ドラム回転軸に沿ったドラム外周面上の直線上の2点の照射位置28R、28Lにレーザ光をそれぞれ照射し、各反射光を計測することにより照射位置28R、28Lの半径方向変位を計測するレーザ変位計と、レーザ変位計から計測信号を受信し、照射位置28R、28Lの半径方向変位の差分を算出する演算部と、演算部で算出された差分の正負と、ドラム21の回転方向と、に基づいて、ベルト22の進行方向Rの端縁22Eの向きが右上がりか左上がりかを検出する検出部と、を備えている。これにより、差分の正負によって、端縁28Eが右上がりか左上がりかを容易に検出することができる。
(もっと読む)
測定装置
この発明は、測定対象(12;15;18)の特性を光学的に測定するための測定装置(6)に関し、この測定装置は、ある有効光学空洞長さを有する空洞(7)を形成する、第1および第2反射端(1、2)を有する主共振器(11)、この第1および第2反射端(1、2)の間の光ビーム経路に沿って進む光を発生するための光学ゲイン素子(3)、並びにこの光学ゲイン素子(3)とこの第2反射端(2)の間のこの光ビーム経路に沿って配置してある分散集束共振器素子(5)を含み、それでこの測定対象が少なくとも部分的にこの主共振器(11)のこの光ビーム経路内にあるように配置してあり、およびそれでこの測定装置(6)が更にこの主共振器から出た光の特性を検出するための検出手段(8)を含み、この検出した特性の値がこの測定対象の特性の尺度である。 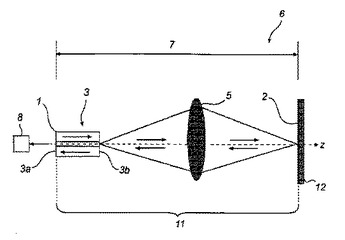 (もっと読む)
(もっと読む)
近接度検出器
光源(1)と、光源(1)により照明されるときに基準物から生じる後方散乱光を受光するための光検出器(3)とを備え、光検出器(3)への後方散乱される光の強度を近接度の尺度として利用することにより、第1の物体(目標物)と第2の物体(基準物)との間の近接度を検出するための装置に関する。目標物(2)は、焦点面(7)を有し光源(1)により照明される光学デバイス(4)を含む。光源(1)からの光線の軸と光検出器(3)への後方散乱による光線の軸とは互いに非常に接近し、ほぼ平行又は一致する部分を有する。近接度は目標物(2)と、ほぼ焦点面に位置する基準物(6,8)との間の間隔(相対位置)に相当する。  (もっと読む)
(もっと読む)
3D自動測量装置
360度全周囲カメラで得られる動画映像を解析して、画像内の任意の対象物について高精度な三次元計測を行う。所望の計測点と座標が既知の基準点を含む動画像を撮影する周囲画像撮影部101と、撮影画像を記録する画像記録部102と、画像内の映像的な特徴点を抽出する特徴点抽出部103と、画像内の計測点を自動抽出する計測点特定部104と、画像内の基準点を自動抽出する基準点特定部105と、計測点,基準点,特徴点を各フレーム画像内で対
応付ける対応点追跡部106と、対応付けられた計測点,基準点,特徴点の三次元相対座標を演算するベクトル演算部107と、上記演算を繰り返して三次元相対座標を統計処理する誤差最小化処理部108と、基準点の既知座標により三次元相対座標を絶対座標系に変換する絶対座標取得部109と、最終座標を記録する計測データ記録部110と、記録された計測データを表示する表示部111とを備える。
(もっと読む)
パイプ端部における内外部形状自動測定装置

パイプ(1)の端部における内部および外部プロファイルを自動的に測定する装置が説明され、ここでセンサー(11a、11b)は支持体(10)の各回転角度に対して対応するプロファイルの距離を測り、測定されるパイプの軸線(X−X)に平行な方向に滑動自在なスライド(13)に、回転自在に取付けられた支持体の回転軸高さを調整するための手段が設けられる。この測定システムはまた、測定されたパイプの端部に分類コードを帰すための検出されたデータの処理を備えている。 (もっと読む)
自己補償レーザトラッカ
例えばレーザに基づく座標測定装置、レーザトラッカ、又はその他の座標測定装置であり得る座標測定装置を補償する装置及び方法が提供される。一つの例示的な方法では、そのような補償は、埋め込まれたトラッカターゲットによるペイロードパラメータの自己補償を包含する。別の例示的な実施形態では、そのような補償は、埋め込まれた温度センサによるペイロード、アジマスポスト、軸、又はR0パラメータの自己補償を包含する。 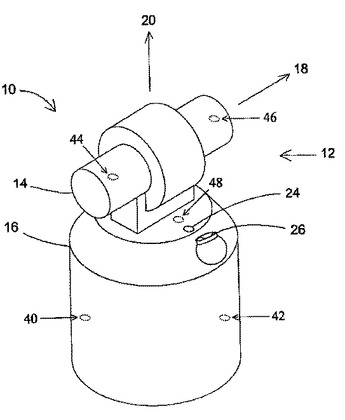 (もっと読む)
(もっと読む)
精密光学アセンブリの位置合わせのための方法および装置
トリプルコーナーキューブ(18)などのような、高度に精密な光学アセンブリを組み立て、計測するための、干渉装置(20)および方法である。その装置および方法は、一つ以上の表面の形、方位、および、表面までの距離を同時に計測することが可能な、一つ以上の干渉計を使用する。その形、方位、および、計測されたそれぞれの表面までの距離を指し示す情報を提供するために、その表面が、干渉計測システムに順次に提示され得るように、多数の表面を有する光学アセンブリを、精密に、移動可能に、取り付けるための手段を有する。  (もっと読む)
(もっと読む)
軸外干渉計測における誤差に対する補償
一般的に、第1の態様において、本発明の特徴は、ステージ上のアライメント・マークの箇所を決定するための方法であって、干渉計とミラーとの間の経路に沿って測定ビームを送ることであって、少なくとも干渉計またはミラーがステージ上に載置される、測定ビームを送ること、測定ビームを他のビームと組み合わせて、ステージの箇所についての情報を含む出力ビームを生成すること、出力ビームから、第1の測定軸に沿って、ステージの箇所x1を測定すること、第1の測定軸に実質的に平行な第2の測定軸に沿って、ステージの箇所x2を測定すること、ミラーの表面変化を異なる空間周波数に対して特徴付ける所定の情報から補正項Ψ3を計算することであって、補正項に対する異なる空間周波数からの寄与を、異なる仕方で重み付けする、補正項Ψ3を計算すること、第1の測定軸に平行な第3の軸に沿って、アライメント・マークの箇所を、x1、x2、および補正項に基づいて決定すること、を含む方法である。  (もっと読む)
(もっと読む)
平面ミラー干渉計測定システムにおけるビーム・ミスアライメントの幾何学的な影響に対する補償
一態様において、本発明は方法に特徴があり、その方法は、干渉分光法システムにおける干渉計を用いて、第1ビーム経路と第2ビーム経路との間の光路差に関係づけられる位相を含む出力ビームを生成することであって、第1ビームは第1の箇所における測定物体に接触し、第1ビームまたは第2ビームは第2の箇所における測定物体に接触し、第1の箇所および第2の箇所は異なる、出力ビームを生成すること、第1の箇所における測定物体の不完全性に起因し、かつ第2の箇所における測定物体の不完全性に起因するずれであって、第1ビーム経路または第2ビーム経路の公称ビーム経路からのずれによって生じる光路差への影響に対処する事前校正済み情報を提供すること、出力ビームから得られる情報および事前校正済み情報に基づいて、少なくとも1つの自由度について測定物体の位置を決定すること、を含む。  (もっと読む)
(もっと読む)
遠隔映像検査アプリケーションにおける自動欠陥検出方法及びシステム
本システムは、仕様書を越える可能性のある領域の表示をオペレータに提供する、或いは前記オペレータによるより詳細な分析を要求する遠隔映像検査装置からの画像の分析を自動的に実行する。パターン認識アルゴリズムは、前記画像の異常或いは欠陥を調査するため連続画像に適用される。前記調査領域は、最初、欠陥の可能性がより高い、検査されるアイテムのエッジに制限される。処理要求及び誤検出の可能性を減らすために、調査領域は制限された視野及び奥行きに狭められる。へこみ及び小さな割れなどの欠陥は、立体測定技術を用いて、或いは公知の補足画像を欠陥と予測することで検出される。この技術は、画像相違マップを提供するのに用いられる。公知の三角アルゴリズムを用いて、前記マップは奥行き及び距離情報を前記処理システムに提供する。  (もっと読む)
(もっと読む)
立体計測装置

【課題】ワークの立体形状を正確に計測する。
【解決手段】立体計測システムは、ワーク1100を撮像するカメラ100と、ワーク1100を照明するストロボ200と、カメラ100の電子シャッターに同期してストロボ200を発光させてワーク1100を撮像するように制御する制御回路と、撮像された画像データを画像処理する画像処理コンピュータとを含む。画像処理コンピュータは、撮像された画像データに対して、明度の不均一を補正するシェーディング補正回路と、補正された画像データに対して、カメラ100からワーク1100までの距離に応じた明度の違いに基づいて、ワーク1100の特徴量を算出する算出回路と、算出された特徴量に基づいて、ワーク1100の位置情報を作成する作成回路とを含む。
(もっと読む)
距離情報入力装置
【課題】本発明は、クロストークの低減された高精度な距離情報を取得可能にする距離情報入力装置を提供する。
【解決手段】本発明の一態様によると、輝度変調光源によって輝度変調された光が照射された前記対象物からの反射光を受光し、光電変換を行うと共に、前記輝度変調光源と同期して感度変調可能な受光素子を備えた距離情報入力装置において、前記受光素子は、光電変換部と、二つの電荷蓄積部と、二つの電荷振り分けゲートと、二つの電荷検出部と、二つの電荷転送部とを有し、前記受光素子のリセット動作と前記電荷蓄積部に蓄積された電荷を読み出す読み出し動作との間に、前記電荷振り分けゲートをオフして前記電荷蓄積部のポテンシャルを上げることによって飽和電荷量以上の余剰電子を排出する動作を少なくとも一回行なうことを特徴とする距離情報入力装置が提供される。
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
3次元画像検出装置の焦点調節機構
【課題】 被写体の視覚情報である2次元画像情報と赤外線により被写体の距離情報である3次元画像情報を検出する3次元画像検出装置において、各検出を迅速かつ常に合焦された状態で行う。
【解決手段】 CCDの色分離フィルタFに赤(R)、緑(G)、青(B)の各波長を中心にした狭い帯域のみに分光透過率特性をもつバンドフィルタと赤外領域のみに分光透過率特性をもつバンドフィルタを用いる。RGBの色フィルタが設けられた画素に対してコントラスト方式の焦点調節を行う。2次元画像情報を検出後、メモリ24に記録されたデータに基づいて、レンズ駆動回路27を駆動し光学系の焦点面を所定距離移動させる。赤外線レーザをレーザダイオード14aから照射して3次元画像情報として検出する。
(もっと読む)
3次元情報入力カメラ
【課題】 被写体や照明光の影響を受けることなく、正確な3次元情報の入力が可能である3次元情報入力カメラを提供する。
【解決手段】 3次元情報入力カメラは、被写体または照明光についての撮影条件を検出する撮影条件検出手段を備える。投影手段1は、2種以上のパターン光を選択可能に投影できるように構成される。投影手段1は、撮影条件検出手段による被写体または照明光についての撮影条件検出結果に基づいて、投影するパターン光の種類を選択して投影する。
(もっと読む)
1,841 - 1,860 / 1,861
[ Back to top ]