
Fターム[2F065AA06]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸方向;距離 (1,861)
Fターム[2F065AA06]に分類される特許
1,741 - 1,760 / 1,861
ステレオ画像処理装置
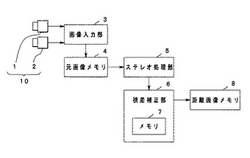
【課題】ステレオマッチング処理におけるマッチング処理を高精度にする。
【解決手段】 対象物を撮像する撮像手段1,2と、前記撮像手段で撮像した一対の画像の小領域毎に、互いの相関を求めることで対応する領域を特定するステレオマッチング処理を行い、ステレオマッチング処理結果である評価関数、該評価関数に基づいて得られる前記対象物までの距離情報及びその信頼度を示す信頼度情報を取得するステレオ処理手段5と、前記信頼度に応じて対象となる小領域の周辺に再探索範囲を設定し、前記再探索範囲内の小領域について求めた前記評価関数に基づいて、前記対象となる小領域について求めた評価関数を修正して修正評価関数を求め、求めた修正評価関数に基づいて距離情報を補正する視差補正手段6とを備えたことを特徴とする。
(もっと読む)
光ファイバプローブ装置
【課題】
試料の中を伝搬する光信号を取り込む光ファイバプローブと試料との距離を制御する光ファイバプローブ装置を提供する。
【解決手段】
試料10から被測定光を取り込む光ファイバプローブ1と、広帯域光を位置検出光として出射する広帯域光源5と、その位置検出光を光分岐器6を介して受けて光ファイバプローブ1に入射させるとともに、この入射された位置検出光の内の、光ファイバプローブ1の開口部端面1eで反射された第1の反射光及び試料10の表面で反射された第2の反射光と試料10から入射される被測定光とを分波する波長分波器4と、波長分波器4からの反射光を光分岐器6を介して受け、上記の第1の反射光と第2の反射光との位相差に起因して生じる光スペクトルのリップルを検出する光スペクトル検出手段7と、この光スペクトルのリップルから光ファイバプローブ1の開口部端面1eと試料10の表面との距離Lを求める処理手段8とを備えた。
(もっと読む)
XYステージ

【課題】 スライダ部のピッチング及びローリングを抑制する機能を具備したXYステージを実現する。
【解決手段】 X軸モータ及びY軸モータによりスライダ部を2次元方向に位置制御するXYステージにおいて、
前記スライダ部のX方向ピッチング角を検出する第1のZ軸センサと、
前記スライダ部のY方向ローリング角を検出する第2のZ軸センサと、
前記第1及び第2のZ軸センサの測定値に基づき、前記X軸モータ又はY軸モータの少なくともいずれかの励磁電流にこれと位相が直交する電流を重畳させる直交電流生成手段と、
を備える。
(もっと読む)
多次元計測システム
レーザを利用したトラッキングユニットは、ターゲットと通信してターゲットに関する位置情報を取得する。具体的には、ターゲットを計測対象点に配置する。次に、ターゲットのピッチ移動、ヨー移動およびロール移動、ならびにトラッキングユニットを基準としたターゲットの球座標を取得する。例えば、ターゲットは、遠隔制御ロボットなどの可動装置に組み込まれた能動素子であってもよい。 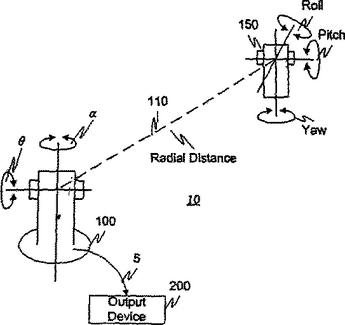 (もっと読む)
(もっと読む)
距離画像センサ
【課題】複数個の感光部を組にして対象空間の同方向における距離を求める場合の測定の信頼性を高めた距離画像センサを提供する。
【解決手段】発光源2は対象空間に所定周期の変調信号で変調された光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物Obで反射され光検出素子1で受光される反射光との変調信号の位相差によって対象物Obまでの距離を求める。光検出素子1に設けた各感光部11は制御回路部3によって対象空間からの光を受光する受光期間が制御される。各感光部11では変調信号の異なる位相に同期した受光期間に受光する。光検出素子1からは変調信号の1周期以上の期間である検出期間ごとに集積した電荷が画像生成部4に与えられ、画像生成部4は、複数の検出期間の電荷量を受光期間別に積算した電荷量を用いて距離を求める。
(もっと読む)
デバイスの動作状態測定装置
【課題】デバイスの様々な動作状態を検知可能な測定装置を、ジャイロセンサー等の部品を用いずに実現することを課題とする。
【解決手段】ゲームコントローラGCは、ハンドル1とカラーパレット21と制御部4とを備える。ハンドル1に備えられたCCD13は、ハンドル1の様々な動作状態において、カラーパレット21を撮像する。制御部4は、CCD13が撮像したカラーパレット21の画像を解析することにより、ハンドル1の動作状態を解析する。たとえば、ハンドル1の上下方向、左右方向への回動量、ハンドル1の回転角、ハンドル1の前後方向への移動量などを測定する。
(もっと読む)
物体検出装置、および方法
【課題】 自車両と衝突する可能性が高い物体を検出するにあたって、誤検出物体を効率的に排除すること。
【解決手段】 撮像画像の横方向の速度を検出し(ステップS2)、「背景と異なる画面領域」の検出を行って、自車両前方に存在する自車両に向かって飛び出してくる物体を含む領域を設定する(ステップS3)。その後、検出した「背景と異なる画面領域」のうち、実際には静止しているにも関わらず、自車両の振動によって横方向の速度が検出されてしまった物体を含む領域を誤検出領域として検出し、当該誤検出領域を削除する(ステップS4)。そして、誤検出領域を削除した結果残った「背景と異なる画面領域」を、自車両前方に存在する移動物体であると判定する(ステップS5)。
(もっと読む)
視線方向を非接触で特定する為の装置及び方法
本発明は、人の眼の現実の視線方向を非接触で特定する為の装置及び方法に関している。本装置及び方法は、眼の動きの調査、環境構成(例えばコックピットデザイン)に対する関心についての精神生理学的な調査、例えば公告のようなデザイン領域及びマーケティング領域、そして、2次元及び3次元空間での関心領域(ROIs:Regions of Interest)の測定、に利用される。  (もっと読む)
(もっと読む)
距離画像センサ
【課題】光検出素子の飽和を防止しながらも高SN比が得られるようにして距離の測定精度を高めた距離画像センサを提供する。
【解決手段】発光源2は対象空間に所定周期の変調信号で変調された光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物Obで反射され光検出素子1で受光される反射光との変調信号の位相差によって対象物Obまでの距離を求める。光検出素子1は、異なる長さの検出期間ごとに集積した電荷を画像生成部4に与えるように電荷の転送タイミングが制御回路部3で制御される。画像生成部4は、各長さの検出期間で集積される電荷の電荷量が光検出素子1に許容された電荷量を越えない範囲で最大になる検出期間を選択し当該検出期間における電荷量を用いて距離を求める。
(もっと読む)
位置検出装置、露光装置、計測システム及び位置検出方法
【課題】複数のセンサーで同期して計測を行ない、結果を高速かつ高品質に信号処理部に伝送し、もって位置検出を高速かつ高精度に行なう位置検出装置を提供する。
【解決手段】位置検出装置200においては、センサー制御手段219,229,239及び269において、センサー211,212,221〜223,231及び261における検出結果のアナログ信号をデジタル信号に変換し、デジタル信号としてそのデータを光通信ネットワークで構築された伝送手段270を介して信号処理手段280に転送している。従って、複数のセンサーにおいて同時に検出されたデータを、同時並列的にデジタル信号に変換し、伝送手段を介して実質的に同時に信号処理手段に提供することができ、複数のセンサーで同時に検出したデータを用いた位置検出処理や、リアルタイムでの位置検出処理を適切に行なうことができる。
(もっと読む)
位置検出方法とその装置、アライメント計測方法とその装置及び露光方法とその装置
【課題】斜入射方式の位置検出方法及び装置において、簡単な処理により、位置検出結果の整合性を検出することができ、少なくとも不適切なフォーカス位置で後段の処理を継続する可能性を少なくすることのできる位置検出方法及び位置検出装置を提供する。
【解決手段】位置検出対象の被計測面上に2つの検出光を各々斜めから入射させ、前記被計測面で反射された2つの反射光を各々受光し、当該2つの反射光の受光面上での各受光位置間の間隔に基づいて、前記被計測面の当該被計測面に垂直な方向の位置を検出する位置検出方法において、前記2つの反射光の各受光位置間の間隔に基づいて検出された所望の検出結果が適切であるか否かを、前記2つの反射光個々の前記各受光位置に基づいてそれぞれ個別に検出された前記被計測面の2つの位置検出結果に基づいて判定する。
(もっと読む)
物体検出装置
【課題】処理負荷を軽減して効率的に障害物などの対象物体を検出することができる装置を提供する。
【解決手段】撮像画像から特徴点を検出し(ステップS102)、各特徴点の過去から現在までの特徴点データ群を記憶保持する(ステップS104)。現在の特徴点データ群において特徴量が所定値以上である特徴点を検出対象候補点とし(ステップS105)、その検出対象候補点の過去の特徴点データ群を抽出して、検出対象候補点の追跡処理を行う(ステップS106、S107)。この追跡処理の結果として求められる検出対象候補点の過去から現在までの画像位置とオプティカルフローの履歴に基づいて、障害物を検出する(ステップS109〜S113)。
(もっと読む)
フォトリソグラフィック露光サイクルの間のステージ・ミラー歪の工程内補正
マイクロリソグラフィ方法は、フォトリソグラフィック露光サイクル中に複数の計測軸のそれぞれを基準としたマイクロリソグラフィ・ステージの位置に関する情報を干渉計計測する工程と、該フォトリソグラフィック露光サイクルによって生成される環境的影響によって生じる干渉計計測ビームを反射するために使用される該ステージの一方の側の局所勾配を表している補正係数と、光学的傾斜と、を決定するために該位置情報を解析する工程と、該補正係数を該ステージの後続の干渉計計測に適用する工程と、を含む。  (もっと読む)
(もっと読む)
変位計
【課題】 波面収差に起因する測定誤差の生じない変位計を提供する。
【解決手段】 低コヒーレンス光を出射するレーザ光源10からのレーザ光を平行光としてビームスプリッタ15で参照用レーザ光L2と測定用レーザ光L1とに分割し、このうち、参照用レーザ光L2を反射器16の第一反射面17及び第二反射面18にそれぞれ反射させることにより、反射器16で反射した後にビームスプリッタ15に向かう参照用レーザ光L2の光軸A2の位置を、ビームスプリッタ15にて分割され参照体へ向かう参照用レーザ光L2の光軸A1よりも平行にずらした位置として参照用レーザ光L2と測定用レーザ光L1をビームスプリッタ15で干渉させ、この干渉光L3の干渉縞22の位置に基づいて被測定体14の変位を測定する。
(もっと読む)
物体の塗布状態評価方法
【課題】 プラズマディスプレイパネルの蛍光体塗布状態を評価する方法に関し、基板に形成された蛍光体層の形状を非破壊検査によって、プラズマディスプレイパネルの製造工程中に検出することを課題とする。
【解決手段】 基板に塗布される蛍光体の塗布状態を評価する方法であって、発光色の異なる少なくとも2種類の蛍光体を塗布した後の基板表面を紫外線で照明した状態で該基板表面を各発光色を検出する異なる光検出器で走査し、各検出器から得られる電気パルス信号のパルス幅を比較して各蛍光体の塗布状態を評価することを特徴とする。
(もっと読む)
自動車シート上の対象物を検出するための装置
本発明は、対象物の2次元表現を生成するための処理ユニットとカメラを有する、自動車シート上の対象物を検出する装置に関し、装置が少なくとも2つの照明源をさらに有し、当該照明源は、対象物が様々な方向から照明されるように位置決めされ、処理ユニットが、それぞれが様々な照明条件下で生成された2つの2次元表現から対象物の3次元表現を生成するのに適していることを特徴とする。  (もっと読む)
(もっと読む)
被写体距離計測装置および方法
【課題】 パッシブ方式にて、被写体にコントラストがない場合も距離計測可能とする。
【解決手段】 被写体撮像光学系12は、平行平面板の繰返し反射干渉により光束の波長帯域を狭帯域化する繰返し反射干渉フィルター20と、集光レンズ22と、バンドパスフィルター24と、受光素子26とを有する。回転ステージ14は、被写体撮像光学系12を回転させる。距離計測部16は、回転ステージ14による被写体撮像光学系12の回転に伴い受光素子26の面内を移動する同一被写体像の強度変化のコントラストを計測し、被写体までの距離演算を行う。
(もっと読む)
首振り運動光てこ駆動装置
【課題】光線追尾式レーザ干渉測長装置において、光線走査範囲が広く小形の首振り運動光てこ駆動装置を提供する。
【解決手段】円弧形モータ2個を可動子10が直交し、その交点が半球ミラー3の反射中心点に位置するように配置する。半球ミラー3を保持する三球球面座フレーム13を前記半球ミラー3によって走査される光線走査範囲を妨げない形状とし、モータの2軸動作を前記半球ミラー3に伝達するとともに半球ミラー3の球面部を三球球面座に設座させるためのバネ16を内蔵した動力伝達装置14〜18を備える。
(もっと読む)
印刷はんだ検査装置
【課題】
表示されたプリント基板のレイアウト上で印刷はんだされた状態が基準のデータに対してどの程度差があるか定量的に一瞥して分布或いは傾向が認識できるようにすることが目的である。
【課題を解決するための手段】
差演算手段9により、測定された印刷はんだ状態を表す、印刷はんだの高さ、面積又は体積を、予め記憶した基準との差を偏差値として求め、階調割振手段10により、偏差値を表示上の階調で表現し、各印刷はんだ箇所毎に階調表示することで分布状態が認識できる構成にし、かつ階調表示がどの程度の偏差値かの目安となる階調スケールを表示する構成にした。さらに、より大きな目で全体の傾向が認識できるようにレイアウトを複数の領域に分けて領域毎に偏差値の平均をとり、その平均値を階調表示する構成にした。
【解決手段】
(もっと読む)
多重同期ビデオストリームからの動的奥行き復元
複数台のカメラからの画像のシーケンスの動的奥行きマップを生成する方法は、カラーに基づく画像セグメンテーションによって誘起された3次元区分的に平坦な表面パッチの集合によってシーンをモデル化する。この表現は、3次元幾何、運動、及び大域的な可視性制約が空間と時間に亘って実施される増分解析を使用して連続的に評価される。提案されたアルゴリズムは、空間カラー整合性制約を組み込むコスト関数と、滑らかなシーン運動モデルとを最適化する。  (もっと読む)
(もっと読む)
1,741 - 1,760 / 1,861
[ Back to top ]