
Fターム[2F065AA52]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339) | 断面 (424)
Fターム[2F065AA52]に分類される特許
101 - 120 / 424
断面形状測定装置

【課題】ワークに施された溝または穴の断面形状を高精度に検出することができる断面形状測定装置を提供する。
【解決手段】白色光を発する光源101と、白色光に含まれる各波長をそれぞれ集光して、溝2に向かう光軸上に複数の集光点を形成する色収差レンズ102と、色収差レンズ102とワーク1とを溝2に交差する方向に相対的に移動させる移動手段と、移動手段によって色収差レンズ102とワーク1とを溝2に交差する方向に相対的に移動させながら色収差レンズ102で溝2に光を集光させたときに、溝2の表面で反射した反射光に基づいて溝2の断面形状を測定する測定手段120と、を備える。
(もっと読む)
画像処理装置および方法

【課題】撮影画像から対象物の画像を精度よく検出する。
【解決手段】コンピュータ1は、設定モードにおいて撮影部18が撮影した対象物の撮影画像を、表示部3に表示する。そして、キーボード6Aからの外部入力に従い高さの閾値データを受付ける。撮影画像について検出された高さ情報と、受付けた閾値データとに基づき、撮影画像から、閾値データが指示する高さ情報を有した部分画像を抽出して表示部3に表示する。運転モードでは、コンピュータ1は、対象物を撮影することにより取得した画像を表示部3に表示し、当該撮影画像について検出された高さ情報と、設定モードにおいて予め受付けた閾値データとに基づき、当該撮影画像から、当該閾値データが指示する高さ情報を有した部分画像を抽出する。運転モードで抽出された画像データは、対象物の欠陥検査のために適用される。
(もっと読む)
変位量計測装置及び変位量計測方法
【課題】測定対象の6軸変位量を簡易な構成により計測することができる、変位量計測装置及び変位量計測方法を提供する。
【解決手段】本発明に係る変位量計測装置は、記憶手段に記憶された初期の第一の位置状態に対する、第一の測定手段で新たに測定された第一の位置状態の変位量と、記憶手段に記憶された初期の第二の位置状態に対する、第二の測定手段で新たに測定された第二の位置状態の変位量と、測定対象Wの寸法とから、測定対象Wの6軸変位量を算出する、演算手段を備える。
(もっと読む)
ロールカリバー位置検出装置およびロールカリバー位置検出方法
【課題】ロールカリバー形状調整のための各カリバーロールのカリバー部分の相対位置関係を高精度に検出することができること。
【解決手段】複数のロール2a〜2dを組み合わせて形成される圧延空間であるロールカリバーの全カリバーを含む圧延方向断面形状を取得する画像処理部13と、取得された圧延方向断面形状をもとに各カリバーロールを識別するロール識別部14と、識別された各カリバーロールのカリバー部分の形状プロフィールを求め、各カリバーロール毎に予め設定される有効カリバー角の範囲内における各形状プロフィールと予め設定される圧延方向断面形状に基づく目標プロフィールとの間の残差を算出する演算部15と、算出された残差および前記目標プロフィールに対する各カリバーロールの形状プロフィールの相対位置を出力する表示部16と、を備える。
(もっと読む)
ねじ形状測定装置およびねじ形状測定方法
【課題】ねじなどの軸方向が長い測定対象物であっても、簡易な構成で高精度にねじ形状を測定することができるねじ形状測定装置およびねじ形状測定方法を提供すること。
【解決手段】光をねじ10の螺旋に平行に照射する光源1と、光源1と同一の受光光軸を有する受光光学系2と、受光光学系2の経路内に配置され、ねじ10の管軸方向に走査する反射鏡3と、ねじ10の管軸に直交する方向の1次元画像を検出するラインセンサ5aを有する撮像装置5と、を備え、反射鏡3による走査に伴って得られる1次元画像を管軸方向に合成することによってねじ10の形状を測定するようにしている。
(もっと読む)
ステム端部位置測定装置およびその方法
【課題】エンジンの機種に関わらずステム端部の位置を測定できるステム端部位置測定装置を提供する。
【解決手段】エンジン10に形成された給排気口11、12中にバルブステム14を配置した状態において、バルブステムの端部141の軸方向の二次元形状をレーザ変位測定し、さらに、エンジン10に形成されたカムジャーナル軸受け17の二次元半円形状をレーザ変位測定するレーザ変位測定部42と、レーザ変位測定部42による二次元測定結果から、バルブステム14の端部141の位置とカムジャーナル軸受け17の位置との距離を演算する演算部50とを有するステム端部位置測定装置。
(もっと読む)
製品形状の検査システム
【課題】欠けの位置、形状、またはサイズ等の影響による誤検出を極力排して高精度に欠けを検出することができる製品形状の検査システムを提供する。
【解決手段】検査対象に生じた形状の欠陥を検出するための製品形状の検査システムであって、以下の構成を備える。距離画像撮像手段(距離画像カメラ130):検査対象までの距離情報を画像として表示する距離画像データを得る。高さプロファイル抽出手段:距離画像データに基づいて、検査対象の表面における高さプロファイルを抽出する。差分プロファイル演算手段:前記高さプロファイルと良好な高さプロファイルである基準プロファイルとの差分データを求める。判定手段:前記差分データに基づいて、検査対象の形状に欠陥があるか否かを判定する。
(もっと読む)
光学式変位計
【課題】計測結果の欠損領域を低減しつつ正確な計測結果を得ることが可能な光学式変位計を提供する。
【解決手段】FB制御部7は、最初の走査の最初の計測点の処理を開始する(ステップS1)。次に、FB制御部7は、現在の計測点の制御モードが計測モードに設定されているか否かを判定する(ステップS2)。次の計測点の制御モードが計測モードに設定されている場合、FB制御部7は、その計測点において検出処理を行う(ステップS3)。次の計測点の制御モードが計測モードに設定されていない場合、すなわち探査モードに設定されている場合、FB制御部7は、その計測点において探査処理を行う(ステップS4)。
(もっと読む)
光学式変位計
【課題】正確な計測結果を得ることが可能な光学式変位計を提供する。
【解決手段】投光素子21は、ビーム状の光を発生する。その光は、投光レンズ22および走査部23を介してワークWに照射される。走査部23は、ワークWの表面で1次元的に光を走査する。ワークWからの反射光は、受光レンズ32を介して受光素子31に入射する。受光素子2により受光量分布を示す受光信号が得られる。投光制御部3は、投光素子21の発光レベルを制御する。受光制御部4は、受光素子31の露光時間を制御する。波形生成部6は、受光信号を波形データに変換する。FB制御部7は、波形生成部6により得られる波形データに基づいて、投光制御部3、受光制御部4および波形生成部6をフィードバック制御する。
(もっと読む)
偏光コントローラ、干渉計及び光画像計測装置
【課題】光ファイバに対して安定的に圧力を付与し、光ファイバを通過する光の偏光状態の経時的変動を抑える。
【解決手段】偏光コントローラ1000は、回転部1020の平面部1021とブロック1030の平面部1032とを光ファイバ2000に当接させ、調整ネジ1100によって回転部1020とブロック1030とを相対的に移動させることにより、平面部1021と平面部1032との間隔を変更して光ファイバ2000に圧力を印加する。更に、偏光コントローラ1000は、サブファイバ3000を有している。サブファイバ3000は、平面部1021と平面部1032との間に配置され、光ファイバ2000と略等しい径を有する。
(もっと読む)
光学式変位計
【課題】種々の状況でピークレベルを適正に調整することが可能な光学式変位計を提供する。
【解決手段】第1の制御モードでは、光の走査の各往路および各復路において、ピークレベルが不適正になる毎にカウンタの値がインクリメントされる。すなわち、光の走査の往路および復路毎に、ピークレベルが不適正になる回数が記憶される。そして、1つの往路または復路においてピークレベルが不適正になる回数が一定回数以上になると、第2の制御モードに切り替えられる。
(もっと読む)
光学式変位計
【課題】光の走査速度を低くすることなく分解能を高めることが可能な光学式変位計を提供することである。
【解決手段】高分解能計測モードでは、往路F1においてX方向における位置P11〜P15で計測が行われ、復路B1においてX方向における位置P11a〜P15aで計測が行われ、往路F2においてX方向における位置P11b〜P15bで計測が行われ、復路B2においてX方向における位置P11c〜P15cで計測が行われる。このように、高分解能計測モードでは、光の走査方向の切り替わりに応じて、X方向における各計測点の位置がずれるように設定される。
(もっと読む)
車輪形状測定装置
【課題】鉄道車両用車輪の踏面部及びフランジ部の形状や、車輪直径、フランジ高さ、フランジ厚さ、左右車輪間隔の距離等の車輪寸法を迅速、正確に計測する車輪形状測定装置を提供する。
【解決手段】車両が走行する線路近傍に、車輪が計測位置に到達したことを検出する車輪計測位置検出センサー、該センサーの信号をトリガーとし車輪の内側からフランジ部と基準溝に向けて帯状の広がりを有するレーザー光を照射して車輪の半径方向の形状測定を行う内側面レーザー変位計及び前記センサーの信号をトリガーとし車輪の外側から踏面部とフランジ部に向けて帯状の広がりを有するレーザー光を照射して車輪の半径方向の形状測定を行う踏面レーザー変位計を設けると共に、前記2つのレーザー変位計により形状測定されたデータを受信し補正処理を行い記録保存する計算機部を有してなる車輪形状測定装置。
(もっと読む)
光断層画像撮像装置
【課題】被検査物の移動部位が前記測定光の光軸方向に移動した位置情報を検出するに際し、精度を劣化させず、装置の簡素化と低価格化を図ることが可能な光断層画像撮像装置を提供する。
【解決手段】被検査物によって反射あるいは散乱された測定光による戻り光と、参照ミラーによって反射された参照光とを用い、前記被検査物の断層画像を撮像する光断層画像撮像装置であって、
参照ミラーの反射位置を制御する反射位置制御手段と、
照明用の光学系によって照明された被検査物の移動部位を、シャインプルーフの原理に基づいてエリアセンサに結像させて観察する移動部位観察用の光学系を備え、該移動部位が前記測定光の光軸方向に移動した際の位置情報を検出する移動部位の位置検出手段と、
移動部位の位置検出手段によって検出された位置情報を元に、前記反射位置制御手段を駆動して参照光の光路長を制御する手段と、を有する構成とする。
(もっと読む)
光断層画像撮像装置
【課題】ゾーンフォーカスにより深さ方向に画像を分割取得するに際し、複数のフォーカス位置への合焦時間の短縮化を図ることが可能となる光断層画像撮像装置を提供する。
【解決手段】所定の撮像深さ範囲内を複数のフォーカスゾーンに分け、複数のフォーカス位置を設定するフォーカス位置設定手段と、
前記所定の撮像深さ範囲内で、該撮像深さ方向の基準位置を少なくとも2つ以上設定する基準位置設定手段と、
前記フォーカス位置設定手段によるフォーカス位置情報と、前記基準位置設定手段により予め設定された2つ以上の基準位置での合焦時の合焦条件を元にして、前記複数のフォーカス位置で順次合焦が行われるように制御するフォーカス制御手段と、
を有する構成とする。
(もっと読む)
形状測定装置
【課題】被測定物体の三次元形状を短時間で高精度に測定可能な形状測定装置を提供する。
【解決手段】形状測定装置1を、被測定物体Sに照明光を照射してこの被測定物体Sを透過した光を検出し、被測定物体Sの透過画像を出力する透過画像検出部4と、被測定物体Sの表面のうち、少なくとも照明光が透過する領域を含む表面の形状を測定する表面形状測定部5と、透過画像検出部4から出力された被測定物体Sの透過画像から得られる形状データを、表面形状測定部5で測定された測定値で補正する制御部7と、から構成する。
(もっと読む)
測定方法及び測定装置
【課題】被検面としての非球面の形状を高精度に測定することができる測定方法を提供する。
【解決手段】球面波の光束を用いて非球面を有する被検面を照明し、前記被検面の形状を測定する測定方法であって、球面波の曲率中心が前記非球面の非球面軸上にある状態で前記非球面軸の方向に前記被検面を駆動して複数の位置zi(i=1〜N)に順に位置決めし、前記複数の位置ziのそれぞれにおいて、前記被検面からの光束と参照面からの光束との干渉パターンを検出する第1の検出ステップと、前記複数の位置ziのそれぞれから前記非球面軸に垂直な方向に既知の量だけシフトした複数のシフト位置si(i=1〜N)のそれぞれに前記被検面を位置決めし、前記複数のシフト位置siのそれぞれにおいて、前記被検面からの光束と参照面からの光束との干渉パターンを検出する第2の検出ステップと、を有することを特徴とする測定方法を提供する。
(もっと読む)
光路長の判定装置及び判定方法
本発明は光路長差判定及び光干渉断層撮影の方法に関し、次の各工程、つまり、空間単一モードにて発光するか、適切な手段(F)により発光が空間単一モードに制限される光源(SQ、BQ)により空間コヒーレントな光を発生させる工程と、前記光源からの光の少なくとも一部を2つの空間的に離れた光路に分割する工程と、少なくとも2つの検出器(D)か少なくとも2つの検出素子(D)を有する1つの検出器(D、A)及び光線を誘導するための他の手段(S、T、BP、F、Q、L、G、Z)を用い、参照光路及び測定光路の光を検出器/検出素子(D)に導いて干渉させる工程と、検出器/検出素子(D)における光強度を受け取り分析してデータセットを得る工程と、データセットの数値的分析及び表示を行い、試料(P)又は試料(P)内の構造における空間的位置及び反射又は散乱の強度の両方を求める工程とを有する。 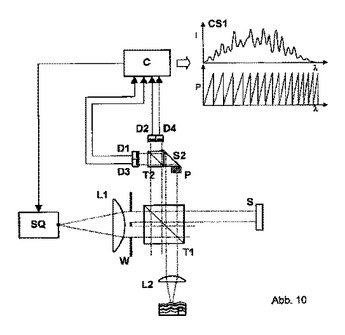 (もっと読む)
(もっと読む)
測定検査装置及び方法
【課題】被測定体としてのタイヤ構成部材の大小に関らず形状の検査の精度に差が生じない測定検査装置及びその方法を提供する。
【解決手段】タイヤの構成部材を被測定体として一定長さの帯状又は線状の光を照射して、当該光の光照射部からの反射光を受光して被測定体の形状を測定するセンサと、このセンサの出力により被測定体の形状を演算する形状処理手段を備えた測定検査装置により、被測定体の別部位を個別に測定する複数個の各センサの出力で得られる各被測定体の形状を形状処理手段で合成し、形状処理手段により合成された被測定体の合成形状と予め用意された基準形状とを判定手段により比較して形状の良否を判定する。
(もっと読む)
光構造観察装置及びその構造情報処理方法
【課題】層構造を有する被計測物体内の中間層を基板とした構造情報を視覚的に判断する。
【解決手段】処理部22は、光構造情報検出部220、光立体構造像構築部221、中間層抽出手段としての中間層抽出部222、層平坦化手段としての平坦化処理部223、構造像変換手段としての光立体構造像変換部224、領域情報抽出手段及び水平断面画像生成手段としての水平断層画像生成部225、画像合成手段としての画像合成部226、表示制御手段としての表示制御部227及びI/F部228を備えて構成される。
(もっと読む)
101 - 120 / 424
[ Back to top ]