
Fターム[2F065AA52]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339) | 断面 (424)
Fターム[2F065AA52]に分類される特許
121 - 140 / 424
ねじパラメーター測定の方法及びデバイス
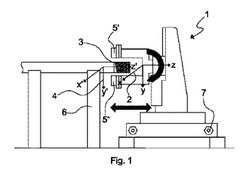
空間座標系(X’、Y’、Z’)を規定するねじ付きの物体の形状を取り込む光学センサー(5)を組み入れている、空間基準システム(X、Y、Z)を規定する、測定デバイス(1)を用いて、該測定デバイス(1)は該空間基準システム(X、Y、Z)内で該ねじ付き物体を表す2次形式を記述する第1マトリックスを組み立てるコンピュータを有し、かくして該2つの空間座標系間の関係を提供する、該測定デバイスによるねじ付き物体(3)のねじパラメーターの測定方法。該方法はa)該ねじ付き物体上で該少なくとも1つの光学センサー(5)の少なくとも1つの軌跡を事前規定する過程であって、該軌跡に沿って該測定点が、該測定点の値で評価された該マトリックスが、該マトリックスが最大階数を有する条件を満足させるよう選択される、該事前規定する過程と、b)該少なくとも1つの光学センサー(5)により前記少なくとも1つの軌跡に沿う第1走査動作を行い、該事前規定された測定点のデータを取り込む過程と、c)これらのデータを該第1マトリックスに供給し、該第2空間座標系に対する該ねじ付き物体の相対位置を規定するために該第1空間座標系を該第2空間座標系に関係付ける軸変換マトリックスを計算する過程と、d)該第2空間座標系から取り込まれた全データを該第1空間座標系へ変換するために該軸変換マトリックスを使用する過程と、を具備する。 (もっと読む)
画像化システム
深さ方向に間隔を空けられた異なる対象領域を目視顕微鏡法および光干渉断層法によって検査可能にする画像化システムが提供される。軸方向視野および方位分解能は、画像化システムによってどの対象領域を検査するかに依存して変更される。提案される画像化システムは、人間の目の完全な検査に特に適用可能である。  (もっと読む)
(もっと読む)
三次元CT計測システム

【課題】1台の極めて少数のカメラあるいはビデオカメラでシステムを構成する経済的な三次元CT計測システムを提供する。
【解決手段】被写体を立体的に取り囲む複数のミラーを介することにより,一台のカメラによって多方向同時撮影を実施し,得られた多方向同時撮影画像を三次元CT(コンピューター断層)再構成処理により、瞬間三次元輝度分布を得る三次元CT計測システム。
(もっと読む)
表面欠陥評価装置
【課題】対応する測定点と基準点との間の距離を逐次収束させる逐次収束処理に基づいて測定点と基準点とを位置合わせしたのち、測定点と基準点との空間位置座標から適正に表面欠陥を判定する技術を提供する。
【解決手段】測定対象物の測定点と測定対象物の基準表面形状に対応する基準点との間の距離を逐次収束させる逐次収束処理に基づいて前記測定点と前記基準点とを位置合わせした後の測定点データと基準点データとに基づいて測定対象物の表面欠陥を評価する。表面欠陥評価において、基準点と適正に対応せず互いに隣接する複数の測定点からなる誤対応測定点群の分布密度に基づいて当該誤対応測定点群によって規定される表面領域を表面欠陥と判定する。
(もっと読む)
被検査体の検査装置
【課題】被検査体の立体形状を精度良く把握するための画像データを簡易な構成で取得することができる被検査体の検査装置を提供する。
【解決手段】外観検査装置において、第1ラインセンサ〜第3ラインセンサは、第1走査ライン130〜第3走査ライン134のそれぞれの映像を各々が走査する。パターン照明源は、基板の被検査面に斜め方向から光を照射して被検査面に検査パターンを形成させる。解析ユニットは、基板を走査して得られた画像データを利用して、位相シフト法により被検査面の高さを検査する。第1ラインセンサ〜第3ラインセンサ、およびパターン照明源は、第1走査ライン130〜第3走査ライン134の数をn、第1走査ライン130〜第3走査ライン134の間隔をa、副走査方向における検査パターンの周期をPvとしたときに、n×a=Pvとなるよう走査ラインの間隔および検査パターンの周期が設定されている。
(もっと読む)
医療機器
【課題】内視鏡システム10の挿入部12の3次元形状を高速で測定することができる医療機器1を提供する。
【解決手段】被検者11に挿入する挿入部12に配設される、複数のファイバブラッググレーティングセンサ部3が形成された3本以上の光ファイバセンサ2と、光ファイバセンサ2に広帯域光を供給する光源6と、干渉光を形成するための反射器5と、光源6から供給される広帯域光を、同時に、3本以上の光ファイバセンサ2と反射器5とに導光するカプラ7と、光ファイバセンサ2からの反射光と反射器5からの反射光とから干渉光を生成するカプラ7と、カプラ7からの干渉光を検出する検出部8と、検出部8の検出結果に基づき、挿入部12の形状を算出する算出部9Aと、を有する。
(もっと読む)
物体形状評価装置
【課題】測定装置の測定技術上の条件から、特定の測定領域でその測定誤差が大きくなるような場合においても測定点群と基準点群との合同変換が適正に行われ、その結果、測定対象物の物体形状評価が適正に行われる物体形状評価装置を提供する。
【解決手段】 測定対象物の形状に対応する多数の測定点と、測定対象物の基準形状に対応する多数の基準点との間の距離を逐次収束させる逐次収束処理に基づいて測定点と基準点とを位置合わせし、位置合わせ後の測定点データと基準点データとに基づいて測定対象物の形状を評価する物体形状評価装置。位置合わせ処理において、隣接する前記測定点の間の隣接点間距離又は隣接する前記基準点の間の隣接点間距離に基づいて隣接点間距離重み係数を決定し、当該隣接点間距離重み係数が逐次収束処理における逐次収束評価値を求める際に用いられる。
(もっと読む)
光断層画像測定装置
【課題】簡素な構成であって、広範囲なプローブ個体ばらつきに対応でき、しかも測定のための調整が容易である光断層画像測定装置を提供する。
【解決手段】複数のプローブ10を取り替えて使用するとき、各プローブ10毎の長さのばらつきによる測定光L1および反射光L3の光路長にばらつきが生じた場合であっても、本実施の形態によれば測定対象Sからの断層信号が複数生じるため、光路体OPSの光路長を一体で微調整するだけでいずれかの断層画像を迅速に且つ容易に捉えることができる。
(もっと読む)
成型ドラム上のタイヤ構成部材の検査方法及び装置
【課題】 生タイヤの生産を停止させずに成型ドラム上のタイヤ構成部材を検査すること、及び検査した部材とそれを成型した生タイヤとを対応させることを可能にする。
【解決手段】 成型ドラム4にタイヤ構成部材5を貼り付けた後、成型者がジョイント合わせ等を行っている機械の待ち時間に、点観測式レーザ変位計1により、タイヤ構成部材5の表面迄の距離を測定する。その測定データと、予め測定しておいた成型ドラム4の表面迄の距離の測定データを基に、タイヤ構成部材5の断面形状データ及び貼り付け位置データを求める。求めたデータを、そのタイヤ構成部材5を用いて成型する生タイヤのバーコードとともにデータベース3に保存する。また、求めたデータとマスタデータとを比較処理部9で比較し、差が所定の閾値を越えた場合、比較結果出力部10でアラームを出力する。
(もっと読む)
溶接用レーザ・視覚複合センサおよび溶接制御方法
【課題】センサヘッドも計測システムも一つだけでよい溶接用レーザ・視覚複合センサおよび溶接制御方法を提供する。
【解決手段】開先上に投光したレーザ光(レーザスリット光25)の開先断面像と、アーク直下の溶融池及び電極14の画像を得るための溶接用レーザ・視覚複合センサであって、溶接トーチ22を中心として、トーチ移動方向の前方及び後方斜め方向の一方にレーザ投光器24を配設し、他方に画像撮影カメラ26を配設する。
(もっと読む)
素体形状の測定方法及び電子部品の製造方法
【課題】簡便でばらつきを抑制した素体形状の測定方法を提供する。
【解決手段】略直方体形状のグリーン素体の角部の削り量を測定する。削り量は、グリーン素体の2つの側面の交線と角部との間の距離である。まず、変位計が、2つの側面の交線と垂直な断面上の角部領域のプロファイルを計測する(計測ステップS31)。次に、算出装置が、プロファイルの極値点の座標を特定する(ステップS32)。プロファイルのうち2つの側面それぞれの一部の前記断面上のプロファイルを示す2つの直線と、極値点を通るプロファイルの接線と平行な直線との2つの交点の座標を算出する(ステップS33)。次に、2つの交点の座標に基づいて、2つの交点間の距離を算出する(ステップS34)。2つの交点間の距離を2で割った値から、接線と平行な直線との間の距離を引いた値を算出し、当該値を前記削り量とする(ステップS35)。
(もっと読む)
基板表面形状検出方法及びその装置
【課題】パターンドメディアの検査において、ナノインプリント時の欠陥か、表面に付着した異物あるいは傷かを区別して検査する。
【解決手段】ナノインプリント時の欠陥の検査は複数の波長を含む第1の光源からの光をハーフミラー7、対物レンズ8を介してディスク基板1に照射し、反射光を対物レンズ8、ハーフミラー7を介して分光器9に入射させることによってスキャットロメトリー法により検査する。ディスク表面の異物あるいは傷をレーザ光10を斜め方向から照射し、第1の仰角と第2の仰角に配置した検出装置11、12によって検出する。スキャットロメトリー法による欠陥の座標が異物あるいは傷の座標と一致すれば、ナノプリント時の欠陥ではないと判断し、一致しなければナノプリント時の欠陥と判断する。
(もっと読む)
円筒体の表面検査装置
【課題】円筒体における凸状欠陥の検査を簡単かつ正確に行える円筒体の表面検査装置を提供する。
【解決手段】本発明は、円筒体Wを軸心回りに回転させつつ、表面状態を検査するようにした円筒体の表面検査装置を対象とする。本装置は、円筒体Wの周面端部に転がり接触し、かつ円筒体の位置を規定する基準ローラ51と、円筒体Wの周面端部に凸状欠陥W5が形成されている場合に、その凸状欠陥W5に基準ローラ51が接触して、円筒体Wが乗り上がることにより、円筒体が径方向に変位する際の変位量を検出する変位量検出手段と、変位量検出手段からの情報に基づいて、円筒体における凸状欠陥の有無を検出する凸状欠陥検出手段と、を備える。
(もっと読む)
ミラーの平面度検査装置
【課題】レーザ光照射時点や最大変形時におけるミラーの平面度を確認することができるミラーの動的平面度の検査装置を提供する。
【解決手段】パルス状レーザ光9を出力するレーザ発振器8と、レーザ光9の光軸上に45度の角度で配置され、入射するレーザ光9の50%を透過、残り50%を反射するビームスプリッタ12と、ビームスプリッタ12を透過したレーザ光9の光軸上に垂直に配置され、入射するレーザ光9を反射する基準ミラー13と、基準ミラー13で反射後、ビームスプリッタ12で反射されたレーザ光9trの光軸上に配置され、ミラー1で反射後、ビームスプリッタ12を透過したレーザ光9rtとを受光する受光装置16に接続され、受光されたレーザ光9trとレーザ光9rtによる干渉縞からミラー1の表面形状を数値化する画像処理装置17と、ミラー1の現在位置情報に基づいてレーザ発振器8と受光装置16を動作させる制御装置4とからなる。
(もっと読む)
パターン形状検査方法及び半導体装置の製造方法
【課題】SWTプロセスにおいて、パターン形状を高精度で検査可能なパターン形状検査方法、及び半導体装置の品質を向上可能な半導体装置の製造方法を提供する。
【解決手段】基板上に周期的に形成された第1のパターンの側壁を被覆する側壁部よりなる第2のパターンの断面形状を検査するパターン形状検査方法であって、第2のパターンが形成された基板に入射光が回折反射される反射光の振幅比スペクトル及び位相差スペクトルよりなる測定データを得る測定ステップS21と、前記側壁部の断面形状を決定する形状パラメータが異なる複数の断面形状モデルについて、計算上の振幅比スペクトル及び位相差スペクトルよりなる複数の計算データを計算し、計算データが第2のパターンの測定データと最もマッチングするように形状パラメータを決定することによって、第2のパターンの断面形状を決定する決定ステップS22〜S25とを含むことを特徴とするパターン形状検査方法。
(もっと読む)
高速画像再構築方法
【課題】精度が高く、演算速度が速く、補間精度と補間間隔が変化可能な補間方法を提供する。
【解決手段】予めフーリエドメイン光干渉断層計システムの特性により、波長情報を抽出し、波長空間に均一に分布している一組の波長ベクトルを得ることにより、当該波長ベクトルのCCDにおける仮想位置係数を得て、離散フーリエゼロパディング補間方法の伝達関数により重み係数マトリックスを生成し、システムの作動時に、重み係数マトリックス及び収集されたデータに基づいて補間を行うか又はデータマトリックスに対して窓掛け、切捨てを行った後補間して、所望の補間データを得る。
(もっと読む)
パターン計測装置、パターン計測方法およびプログラム
【課題】少ない情報で波形ライブラリの作成を可能にし、かつ、小さな波形ライブラリで高い計測分解能を達成する。
【解決手段】プロセスパラメータを変化させてパターンの断面形状をシミュレーションにて予測し、予測した断面形状から分光波形をシミュレーションにて算出し、各プロセスパラメータに対応づけることにより波形ライブラリを形成する。該波形ライブラリを参照することにより、所望の形状が得られるように設定されたプロセスパラメータを用いて実際に作成された計測対象としてのパターンから実際に取得した分光波形に対応する最適なプロセスパラメータを算出し、得られた最適なプロセスパラメータに対応する最適なパターン断面形状を生成して計測を行う。
(もっと読む)
光学式計測装置およびその制御方法
【課題】光学式計測装置において、計測条件の適切な設定変更を容易に行なうことができるようにする。
【解決手段】レーザ光が照射された計測対象物体5の表面を撮影すると、表面高さに応じて撮像素子の受光面上の輝点の位置が変化するラインビーム像が得られる。物体表面の高さが変化すると撮像素子の受光面上で所定の方向(変位方向)に像が移動することになる。物体表面の高さは、各ラインビームの受光強度が当該受光強度についての背景除去レベルを用いて処理されることにより求められる。なお、背景除去レベルは、たとえばレーザ光が照射されない状態における受光強度の最大値とされる。
(もっと読む)
画像計測装置及びコンピュータプログラム
【課題】計測対象物の形状に応じたエッジ部分の指定及び計測方法の指定を要することなく、計測対象物を簡便に計測することができる画像計測装置及びコンピュータプログラムを提供する。
【解決手段】撮像素子で結像された画像を表示する表示手段332と、計測対象物における2点を示す画像の近傍にて始点及び終点の指定を受け付ける受付手段333と、始点及び終点の近傍に存在する直線状のエッジ部分を検出又は直線状でないエッジ部分の極小点及び/又は極大点を頂点エッジとして検出するエッジ検出手段334と、複数の頂点エッジを検出した場合、始点近傍の頂点エッジ等と終点近傍の頂点エッジ等との距離が最大又は最小となる頂点エッジを選択する選択手段335と、始点近傍の選択した頂点エッジ等と、終点近傍の選択した頂点エッジ等との距離に基づいて、計測対象物の2点間の距離の実測値を算出する算出手段336とを備える。
(もっと読む)
半導体集積回路装置の製造方法
【課題】半導体集積回路装置の製造技術において、データ作成が簡単で不良部の目視確認が容易な、基板上に印刷された半田の2D・3D検査技術を提供する。
【解決手段】2D・3D半田印刷検査装置による基板の検査工程において、検査装置に2D検査機能と3D検査機能を実装し、最初に3D検査を実行し、続いて2D検査を実行することで、検査終了と同時に不良判定パッド(印刷半田)の部分の2D撮像画像を拡大表示することを可能とし、それにより作業者に効率的な目視確認環境を提供する。また、検査データ作成時に生基板を測定することにより、検査装置が自動で生成した独自の高さ測定基準とパッド上面高さとの関係を調べ、これにより、検査においてパッド上面基準による印刷半田の高さ・体積の測定を可能とする。
(もっと読む)
121 - 140 / 424
[ Back to top ]