
Fターム[2F065BB05]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 立体;曲面 (3,471)
Fターム[2F065BB05]の下位に属するFターム
Fターム[2F065BB05]に分類される特許
1 - 20 / 2,490
情報処理装置、情報処理装置の制御方法、およびプログラム
コイルばね計測装置
吊荷周辺の物体の高さ情報通知システム
環境認識装置
投影装置、3次元計測装置並びにその制御方法およびプログラム
車体寸法計測装置及び車体寸法計測方法
同期されたユーザインタフェース機能を含むマシンビジョンシステムプログラム編集環境
基板の凹部の検査方法および基板のレジスト膜の検査方法
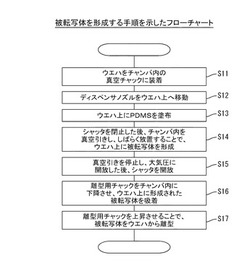
【課題】有底の凹部の状態を非破壊で検査し、製造コストを低減させる。
【解決手段】本発明のウエハ50のビア孔51の検査方法は、有底のビア孔51が表面に形成されたウエハ50に被転写材料を塗布し、この被転写材料をビア孔51内に充填させ、被転写材料を硬化させた後、ウエハ50から離型させることでビア孔51がビア像71として転写されてなる被転写体70を形成する転写工程と、ビア像71の表面を観察することでその表面形状の画像データを作成する表面観察工程と、ビア像71の画像データに基づいてビア像71の形状を評価し、ビア孔51内の状態を検査する検査工程とを備えたところに特徴を有する。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
光学式変位センサ
【課題】ノイズ光が入射した場合に誤った計測が行われるのを防止して、計測の精度を確保する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、変位を計測する計測処理部として機能するCPU10とを具備するセンサ1のCPU10に、受光量の変化を表すパラメータまたは受光量の増減に応じて調整される感度を示すパラメータの値があらかじめ定めた許容範囲に入るか否かを判別する判別手段の機能を付与する。CPU10は、判別対象のパラメータの値が許容範囲に入っていると判別した場合には、計測処理を行って結果を出力するが、判別対象のパラメータの値が許容範囲を逸脱すると判別した場合には、計測結果が出力されないように制御する。
(もっと読む)
物品配列検査方法および物品配列検査装置
【課題】整列状態にあることが要求される物品の列について、整列状態を乱す物品の位置ずれ、欠落、倒れなどの種々の整列不良を検出することを可能とする。
【解決手段】物品の列が整列状態にあるかどうかを検査する方法であって、準備工程では、整列状態にある物品a1〜a4の列Paに対しその物品の列を列方向の全幅にわたって切断するような帯状の光Rを照射して各物品a1〜a4の表面に各物品の輪郭に沿う光切断線Lを生成するとともに、その光切断線Lを撮像して基準となる画像を取得する。検査工程では、検査対象の物品b1〜b4の列Pbに対し同じ帯状の光Rを照射するとともに、前記準備工程で撮像した光切断線の生成位置に対応する位置に生成された光切断線Lを撮像して検査対象画像を取得した後、その検査対象画像を前記基準となる画像と照合して、検査対象の物品b1〜b4の列Pbが整列状態にあるかどうかを判別する。
(もっと読む)
変位測定方法および変位測定装置
【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
対象検出装置および対象検出方法
【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
3次元形状データ取得装置の光学測定ヘッド
【課題】小型化の3次元形状データ取得装置の光学測定ヘッドを提供する。
【解決手段】投射光学系および撮像光学系は、プリズム型偏光ビームスプリッタ14と、ワイヤーグリッド偏光ビームスプリッタ17と、プリズム型偏光ビームスプリッタ14とワイヤーグリッド偏光ビームスプリッタ17との間に配置される結像光学系15とを有し、MEMS13と撮像手段16は、互いにプリズム型偏光ビームスプリッタ14の偏光分離面を挟み互いに交差する方向に配置され、ワイヤーグリッド偏光ビームスプリッタ17は、MEMS13から出射され結像光学系15を透過した光を透過し、ミラー18により被測定物表面に投射され被測定物表面で反射された光は、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面で結像光学系15に向けて反射させる構成とし、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面と、ミラー18の反射面とは互いに非平行とした。
(もっと読む)
部品実装装置および部品実装方法
【課題】物体の形状認識を正確に、かつ、高速に行うことのできる部品実装装置を提供する。
【解決手段】撮像部10と、輝度変化光を斜めから照射する照射部20と、対象物および基準点42を撮像部および照射部に対し第二方向に相対的に移動させて、対象物および基準点を撮像対象領域に対して通過させる移動部40と、基準点データと対象物データとを取得するデータ取得部と、それぞれの撮像のタイミングT1〜T4での基準点位置と基準点基位置との位置ずれを導出する位置ずれ導出部と、それぞれの撮像のタイミングの対象物基位置に対して、導出された位置ずれを加算して得られた対象物の測定部位の位置に対応する輝度値を取得する輝度値取得部と、取得された輝度値に基づいて、位相シフト法による波形を作成する波形作成部とを備える。
(もっと読む)
3次元計測装置およびそれに用いられる照明装置
【課題】被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供する。
【解決手段】3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3とを備える。また、3次元計測装置1は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出し、被計測物8の被照射面の向きを求める演算手段5とをさらに備える。照明手段2は、円偏光を被計測物8の一部に照射する。移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
(もっと読む)
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法
【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
画像解析装置及びこれを用いた物体検出装置
【課題】対象物体上の外表面形状によらず、対象物体までの距離を利用した適正な制御や処理を実現することを課題とする。
【解決手段】自動車に搭載された2つのカメラ10A,10Bで自車両周囲の撮像領域を撮像して得られる複数の撮像画像を解析して対象物体までの距離を算出する際、撮像領域に向けて互いに異なる方向から非可視光を照射する2つの光照射部21,22の光照射時期が互いに重複しないように交互に非可視光を照射し、当該非可視光の照射によって対象物体の外表面に生じる非可視光の照射領域と非照射領域との境界線C1,C2上の同一の地点を映し出す対応点を光照射時期ごとにそれぞれ特定し、光照射時期ごとに、対応点のズレ量に基づいて距離を算出する。
(もっと読む)
3次元形状測定装置
【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
(もっと読む)
1 - 20 / 2,490
[ Back to top ]