
Fターム[2F065BB12]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 長尺体 (707) | 線状 (246)
Fターム[2F065BB12]に分類される特許
161 - 180 / 246
鉄道のプラットホーム測定装置及び測定方法

【課題】軌道とプラットホーム端部との距離を精度良く測定でき、かつプラットホーム端部の表面形状も測定できる操作性に優れた測定装置を提供する。
【解決手段】 軌道10上を走行可能な台車51と、台車51の走行距離を測定し、一定走行距離毎に電気信号を出力する距離測定手段(走行距離センサ57、コントローラ65)と、台車51上に設置され、前記電気信号が出力される毎にプラットホーム20の端部の、軌道10と直交する方向の縦断プロファイルを測定する非接触位置センサ64と、データ収集装置70とを具備する。データ収集装置70は測定データから軌道10に対する前記端部の距離を算出する手段と、その算出値と管理値とを比較する手段と、比較結果を表示する手段と、測定データ及び比較結果を記憶する手段を備える。
(もっと読む)
トロリ線の摩耗測定装置

【課題】トロリ線周辺の構造物に影響されることなく、トロリ線の全区間に亘った摩耗測定を確実、容易にする。
【解決手段】検査車両1には、トロリ線の敷設方向とは垂直になる走査線方向にしたラインセンサ5と照明灯6を搭載し、検査車両の走行によってトロリ線のパンタグラフ接触面を撮影し、この画像信号を計測用コンピュータ7が記録装置8に保存する。ラインセンサに得られる走査線の輝度信号を時系列に並べてラインセンサ画像を作成し、このラインセンサ画像から二値化ラインセンサ画像を得、この二値化ラインセンサ画像からトロリ線摩耗部のエッジを検出し、このエッジデータに対するトロリ線全体幅とラインセンサから見たトロリ線高さからトロリ線の摩耗部の実幅を求める。
(もっと読む)
トロリ線の摩耗測定装置
【課題】トロリ線周辺の構造物に影響されることなく、トロリ線の全区間に亘った摩耗測定を確実、容易にし、しかも昼間に計測できる。
【解決手段】検査車両1には、トロリ線の敷設方向とは垂直になる走査線方向にしたラインセンサ5と照明灯6を搭載し、検査車両の走行によってトロリ線のパンタグラフ接触面を撮影し、この画像信号を計測用コンピュータ7が記録装置8に保存する。ラインセンサに得られる走査線の輝度信号を時系列に並べてラインセンサ画像を作成し、このラインセンサ画像から二値化ラインセンサ画像を得、この二値化ラインセンサ画像から空の部分を除去してトロリ線摩耗部のエッジを検出し、このエッジデータに対するトロリ線全体幅とラインセンサから見たトロリ線高さからトロリ線の摩耗部幅を求める。
(もっと読む)
光ファイバセンサ
【課題】センシング部の応答距離を維持したまま、温度や歪み等の物理量の測定精度を向上させることができる光ファイバセンサを提供する。
【解決手段】温度、歪み、圧力等の物理量を測定する光ファイバからなるセンシング部11と、センシング部11において物理量を光学的に測定するための光源13と、センシング部11からの後方散乱光を検出する光検出器とを備えた光ファイバセンサにおいて、センシング部11は、複数本の光ファイバ21を近接して並列に設けると共に、それら複数本の光ファイバ21を一本の光伝送路として光学的に接続した。
(もっと読む)
関心パラメータを測定するための光ファイバ装置
温度、歪み、光エネルギー強度、電解教祖、および磁界強度のような関心パラメータ(122)を測定するセンサとして使用される光ファイバ(100)が提供される。1または2以上の光格子(114-1)を有する光透過性のコア(102)の上に、第1の光クラッド層光ファイバ(104)が設置される。光格子(114-1)は、コア(102)を通って伝播する光の選択波長の伝播経路を調整する。また、光格子(114-1)は、第1の光クラッド層(104)の屈折率を変化させる。光の選定波長は、コア材料105に付与される関心パラメータ122に依存し、光格子(114-1)によって変化する、コア材料105の屈折率によって、ある程度定められる。1または2以上の検出器(410、430、450、455)を用いて、反射光および/または透過光の特性が定められる。反射光および/または透過光の特性を把握することにより、関心パラメータ(122)が定められる。 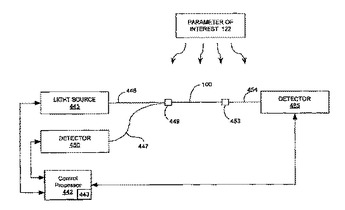 (もっと読む)
(もっと読む)
歪み量測定システム
【課題】多数の歪み量を、ファイバ歪計を用いて簡単に測定する。
【解決手段】入射光に対する反射光の波長の反射中心波長からのずれ量が測定対象から印加された歪み量に応じて変化するFBGを用いたファイバ歪計13と、各ファイバ歪計がそれぞれ光カプラ14を介して接続された光ファイバ12と、光ファイバの一端から反射中心波長に対して微少波長ずれた測定波長のパルス波形を有した測定光cを印加する狭帯域光源11と、光ファイ及びファイバ歪計の測定光に対する反射光特性fを測定する特性測定部24と、反射光特性における各ファイバ歪計の反射光レベルの該当ファイバ歪計に歪みを印加していない状態における基準の反射光レベルからの変化量から、各ファイバ歪計に印加された歪み量を算出する歪み量算出手段32と、算出された各歪み量を出力する歪み量出力手段34とを備えている。
(もっと読む)
被膜検査装置及びそれに用いるパレット
【課題】 検査精度の向上が図られた被膜検査装置及びそれに用いるパレットを提供する。
【解決手段】 本発明に係る被膜検査装置10は、被検査物30の検査領域Fを撮像して、被検査物30の芯線34bに被覆された被膜34aの状態を検査する被膜検査装置であって、被検査物30が収容され、被検査物30の検査領域Fに対応する部分に貫通孔24bが設けられたパレット24と、被検査物30の検査領域Fに励起光を照射するUV光源16と、UV光源16の励起光が照射された状態の被検査物30を撮像するカメラ14と、カメラ14によって取得した被検査物30の画像の処理をおこない、被検査物30の被膜状態の合否を判定する画像処理装置18とを備える。
(もっと読む)
棒材の真直度測定システム
【課題】人為的作業を省きながら、棒材の真直度判定(測定)を機械的、自動的に実施可能にするとともに、作業上の熟練度が要求されず、数値化による真直度の客観的合否判定を実現可能にする。
【解決手段】 直線状のナイフエッジ2aを持つ基準長尺部材2と、前記ナイフエッジ2aに対し所定距離を置いて対向設置された棒材支承部材3、4とが設けられて前記基準長尺部材2および前記棒材9の長手方向に移動可能に設置された架台1と、前記基準長尺部材2および前記棒材支承部材2,3に支承された前記棒材9の上方および下方に設置された発光手段5および受光手段6と、を備え、真直度演算手段7に、前記受光手段6から得られる出力信号に基づいて、前記棒材9および前記ナイフエッジ2a間の距離を該棒材9の長手方向の測定ポイントごとに演算させる。
(もっと読む)
トロリー線消耗量測定装置およびトロリー線消耗量測定方法
【課題】車両走行時にも測定でき、しかも、測定現場での器具(装置)のコンパクト化を図ることができて、短時間に正確にトロリー線の摩耗量を測定することができるトロリー線消耗量測定装置およびトロリー線消耗量測定方法を提供する。
【解決手段】トロリー線1の直下位置から離れた地上における所定仰角の横斜め下方からのトロリー線1の撮影を行う。その撮影されたトロリー線画像に基づいてトロリー線1のデータを測定する。この測定データを演算手段5に送って、この演算手段5にてトロリー線の消耗量を演算する、その後、この演算結果をトロリー線1を撮影したオペレータ側に送信する。
(もっと読む)
光ファイバー格子センサを用いた内空変位計測装置及びこれを用いた計測方法
本発明は、橋梁やトンネルの内空変位など、被測定対象物の傾き及び加速度などを精密に測定するための光ファイバー格子(Fiber Bragg Grating;FBG)センサを用いた内空変位計測装置及びこれを用いた計測方法に関するものであって、被測定対象物に設けられる本体と、上記本体の前面に固定されるように設けられた固定体と、上記固定体と所定距離離隔して水平になるように設けられ、ベアリング結合により回転可能に設けられた回転体と、上記固定体の上部外側面に接着され、上記回転体の上部外側面に接着されて緊張状態を維持するように水平に設けられ、その両端部に光端子が各々設けられた光ファイバーと、上記固定体と回転体との間の光ファイバー上に設けられる光ファイバー格子センサと、上記回転体の下部と所定長さの支持台により連結されて垂直状態に設けられた錘とから構成された計測装置を基準値に設定した後、被測定対象物に設け、地盤の変動に従う変位量を計算することによって、角度及び重力加速度の変位値を計測することができる。  (もっと読む)
(もっと読む)
光ファイバ特性測定装置
【課題】測定時間を短縮することにより被測定光ファイバの動的な特性の変化を測定することができる光ファイバ特性測定装置を提供する。
【解決手段】光ファイバ特定測定装置10は、パルス状のプローブ光L1′を被測定光ファイバ30に入射させて得られるブリルアン散乱光L3を受光するフォトダイオード16と、フォトダイオード16から出力される受光信号を分岐する分岐回路18と、分岐回路18で分岐される受光信号の各々に対して設けられ、受光信号に含まれる周波数成分のうち、それぞれ異なる特定の周波数成分を測定する複数の周波数測定部19a〜19nと、周波数測定部19a〜19nの各々で測定された周波数成分に対して所定の演算を行って被測定光ファイバ30の特性を求める演算部20とを備える。
(もっと読む)
糸条幅の測定方法
【課題】
ワインダ等で巻き上がり、パッケージ化された状態での黒色の糸条の幅を精度良く測定する、さらに、人的操作を少なくして行え、測定時間の短縮および作業疲労度の軽減を図ることができる糸条幅の測定方法を提供する。
【解決手段】
黒色の糸条が巻回されてなるパッケージの外層に位置する糸条の幅を測定する方法であって、幅を測定しようとする糸条に向かって、その長手方向に沿って光を照射し、その反射光を受光し、その受光した反射光の光量の強弱を2値化し、演算して、糸条の幅を測定することを特徴とする糸条幅の測定方法。
(もっと読む)
ワイヤーハーネスの外観検査装置及び外観検査方法
【課題】ワイヤーハーネスの変更に容易に対処でき、かつ、ワイヤーハーネスの外観検査精度を一定に維持できる技術を提供すること。
【解決手段】ハーネス保持部材20上にワイヤーハーネス10が保持される。ハーネス支持柱部24に被当接部材160が設けられており、被当接部材160に識別マーク部130が貼着けられている。撮像部140に当接部材164が一体的に設けられており、当接部材164の先端部に位置情報取得用カメラ132が取付けられている。当接部材164の先端部を被当接部材160に当接させるようにして、撮像部140で検査対象部位を撮像する。位置情報取得用カメラ132による識別マーク部130の読込画像に基づいて検査対象位置が特定されると共に、撮像部140の撮像画像に基づいて外観検査の合否が判定される。
(もっと読む)
接着部はく離形状同定装置
【課題】光ファイバセンサを用いて構造物中の接着部に生じるはく離の形状を精度よく同定する。
【解決手段】構造用複合材aの接着層a3に光ファイバb6を配置する。光ファイバb6には、歪に応じてスペクトルが変化する反射光を出力する光ファイバセンサ(FBGセンサ)が形成されており、接着層a3に分散配置される。光スペクトラムアナライザb3は、その反射光からスペクトル情報を取得し、演算処理装置b1に与える。演算処理装置b1は、スペクトル情報に基づき算出される歪を用いた第1の形状同定演算と、スペクトル情報に基づき反射光のスペクトル形状による第2の形状同定演算とを、先の同定結果を後の形状同定演算の初期値として用いながら、交互に繰り返し行って接着層a3のはく離形状を同定する。画像表示装置b2に同定した接着層a3のはく離形状を接着層a3上での配置とともにグラフィック表示する。
(もっと読む)
ブリルアンスペクトル測定装置
【課題】光ファイバにおける所定区間のブリルアンスペクトルのパラメタをより精度良く測定すること。
【解決手段】本発明のブリルアンスペクトル測定装置1は、光ファイバ部10と、光ファイバ部10から出力されるブリルアン散乱光のスペクトルを検出する測定器5と、を備える。光ファイバ部10は、センシングファイバ11と、センシングファイバ11に直列接続された接続用ファイバ12,13とを含む。所定の温度及び所定の印加歪状態において、センシングファイバ11のブリルアンスペクトルの中心周波数νB1と接続用ファイバ12,13のブリルアンスペクトルの中心周波数νB1との差は、センシングファイバ11及び接続用ファイバ12,13のブリルアンスペクトルの線幅以上である。
(もっと読む)
再生ファイバーパルプを測定するための方法及びその測定装置
測定装置は、カメラ(206)と、イメージ処理ユニット(210)と、分別管(204)を含み、サンプルを再生ファイバー処理の再生されたファイバーパルプから受け取り、粒子サイズに従って流れるサンプルの粒子を整列させる。測定装置は、サンプルを粒子サイズに従う少なくとも2つの断片として処理する。カメラ(206)は、少なくとも1つの断片を画像化する。イメージ処理ユニット(210)は、カメラ(206)によって画像化された画像を受け取り、そして、少なくとも1つの画像化された断片内に付加された物質の少なくとも1つのパラメータを測定する。 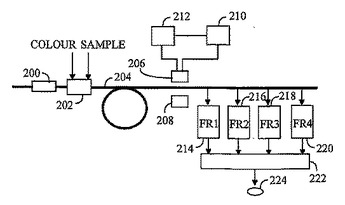 (もっと読む)
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】トロリ線からの反射光にムラができず、均一な照明条件を作ることを目的とする。
【解決手段】ラインセンサ11を用いてラインセンサ画像を作成するラインセンサ画像作成手段50と、ラインセンサ画像に対して二値化処理を行うことにより二値化ラインセンサ画像とする二値化処理手段53と、前記二値化ラインセンサ画像のノイズを除去するノイズ除去処理手段54と、ノイズ除去後の前記二値化ラインセンサ画像からトロリ線摩耗部のエッジを検出しエッジデータとするエッジ検出処理手段55と、前記エッジデータとトロリ線高さデータに基づいてトロリ線摩耗部幅の計算を行うトロリ線摩耗部幅計算処理手段56とを有する画像処理によるトロリ線摩耗測定装置において、前記ラインセンサ1は、検査車両4の屋根上にトロリ線3を見上げるよう鉛直上向きに設置され、且つ、前記トロリ線3を照明する照明手段は前記検査車両4上で前記検査車両の進行方向に対して垂直をなす方向に複数の点光源2を直線状に設置してなることを特徴とする。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】昼間太陽光の下においてもトロリ線の摩耗部分の幅を測定する装置を提供するにある。
【解決手段】ラインセンサ1を用いてラインセンサ画像を作成して入力画像として保存する手段10と、前記ラインセンサ画像全体に対して2値化処理を行う手段20と、2値化処理された前記ラインセンサ画像に対して外部から入力されてくるトロリ線高さパラメータと実際のトロリ線の太さのパラメータを用いて画面上のトロリ線の太さを計算し、それ以上大きさの白の領域を黒の領域に反転する反転処理を行う手段30と、2値化処理及び反転処理された前記ラインセンサ画像に対してノイズ除去処理を行う手段40と、2値化処理、反転処理及びノイズ除去処理された前記ラインセンサ画像における白領域をトロリ線摩耗部として、該トロリ線摩耗部のエッジを検出する手段50と、検出された前記エッジから前記トロリ線摩耗部の幅の計算を行う手段60からなることを特徴とする。
(もっと読む)
位置検出装置、弦楽器用のピックアップ
【課題】簡易な構成で物体の位置を検出する位置検出装置を提供する。
【解決手段】点光源1は、連続スペクトル光を出力し、この光はスリット11を介してプリズム21、22に入射する。スリット11はプリズム21、22に入る光を互いに分離する。このプリズム21、22に入射した光は、プリズム21、22でスペクトルに分光され、光の束201、202は、複数の方向から物体100に照射する。物体100で反射した光の束201の反射光は受光部31で受光され、物体100で反射した光の束201の反射光は受光部32で受光される。受光部31、32は各々2つのフォトトランジスタ301、302を備え、光を電流に変換する。波長計算部41、42はこの出力電流値の比からこの反射光の波長λ1、λ2を測定する。波長によりプリズム21、22での屈折率が異なるから、座標計算部6はその方向の交点から物体100の位置を検出する。
(もっと読む)
光ファイバセンサおよびその製造方法
【課題】極めて高温の環境化においても、測定対象物の歪み量を正確に検出することができ、製造および布設も容易に行うことができる光ファイバセンサおよびその製造方法を提供する。
【解決手段】同一の基材2上に歪み検知用光ファイバ3と温度補償用光ファイバ4とが併設された光ファイバセンサ1であって、前記歪み検知用光ファイバ3は、前記基材2上に固定されて配設され、前記温度補償用光ファイバ4は、その外周上において固着されることなく耐熱性を有する繊維5で被覆され、該被覆繊維層50を前記基材2に固定して、前記基材2上に配設されており、前記温度補償用光ファイバ4が該被覆繊維層50内側でその長手方向に伸縮可能とされていることを特徴とする光ファイバセンサ1。
(もっと読む)
161 - 180 / 246
[ Back to top ]