
Fターム[2F065BB12]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 長尺体 (707) | 線状 (246)
Fターム[2F065BB12]に分類される特許
121 - 140 / 246
空中架線の管理システム

【課題】 電柱に架かる電線等の状態を精度良く、かつ、安価に計測して管理する空中架線の管理装置を提供する。
【解決手段】 車両に搭載され空中架線の画像データを撮影する撮像部と、車両に搭載されレーザを走査することで空中架線に対する距離方位データを取得する距離方位データ取得部と、車両に搭載され前記車両の位置と姿勢角を計測する計算機と、を備え、前記計算機は前記撮像部が撮影した画像データと前記距離方位データ取得部が取得した距離方位データとを入力し、前記画像データから電柱を検出して前記電柱を含む空間面内にある前記距離方位データを抽出し、抽出した前記距離方位データから空中架線に対応する距離方位データを取得して当該距離方位データに基き前記空中架線の地上高を計測するようにした。
(もっと読む)
線状部材検査装置

【課題】作業員の安全を確保すると共に簡単且つ精度良く検査することのできる線状部材検査装置を提供する。
【解決手段】本発明に係る線状部材検査装置1は、線状部材10を撮影するための撮像手段2と、撮像手段2の前面から所定距離離間した位置において線状部材10を保持可能なように形成された線状部材保持手段11と、を備えていることを特徴とし、好ましくは、上端側に撮像手段2が設けられていると共に下端側に撮像手段2の動作を操作するための操作手段14が設けられた延長手段6を備えているのがよい。
(もっと読む)
マスク検査方法、マスク検査装置及びマスク検査プログラム
【課題】線幅欠陥についての検出感度が高いマスク検査方法、マスク検査装置及びマスク検査プログラムを提供する。
【解決手段】
フォトマスクに形成されたラインパターンの線幅欠陥を検査するマスク検査方法において、フォトマスクを撮像することにより、ラインパターンに対して直交する直線に沿ったセンサ輝度プロファイルPsensを作成し、フォトマスクの参照データに基づいて参照輝度プロファイルPrefを作成し、センサ輝度プロファイルPsensにおける閾値T以上の部分と直線LTとにより囲まれた領域Rsensの面積Ssensを算出し、参照輝度プロファイルPrefにおける領域Rrefの面積Srefを算出し、面積Srefに補正値Hを加えて補正後参照面積Sref−Hを算出し、面積Ssensと補正後参照面積Sref−Hとの差を算出し、この差に基づいてラインパターンの幅が正常であるか否かを判定する。
(もっと読む)
干渉判定装置および脚車輪型ロボット
【課題】 実際の干渉を伴うことなく干渉判定を行うことができ、部品点数および重量の増加を抑制し、干渉判定の制約を低減するのに好適な干渉判定装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、レーザ28〜30およびカメラ32からなる物体センサとを備え、物体センサの測定結果に基づいて障害物の特徴点を検出し、グローバル座標系Pgにおいて、脚車輪型ロボット100の姿勢並びに基体10および脚すね部の形状により特定される脚すね部平面と、検出した特徴点との位置関係に基づいて、脚すね部に対して障害物が干渉するか否かを判定する。
(もっと読む)
光ファイバセンサケーブル、歪検出装置及び歪検出方法
【課題】温度補償用光ファイバをケーブル内に配置することなく正確な歪測定値を得ることができ、長尺製造が可能な光ファイバセンサケーブルの提供。
【解決手段】ケーブル外被に埋設された少なくとも1本以上の歪検出用光ファイバと、ケーブル外被内又は外側に設けられ、内部に温度調節した流体を流すことで前記歪検出用光ファイバを恒温に保持する可撓性の温度調節用流体流路とを有することを特徴とする光ファイバセンサケーブル。
(もっと読む)
光ファイバセンサ及び歪観測システム
【課題】コストアップを抑制しつつ歪目印の検出確度を向上させる。
【解決手段】ブリルアン後方散乱光解析にて歪分布データε(X)を得る歪観測システム40において、入射光パルス幅S相当の固定ピッチYで光ファイバ23を鞘体24などの可撓性長尺支持体に固定した光ファイバセンサ50には、標本化ピッチDと入射光パルス幅S及び固定ピッチYとの中間の歪目印部長Nを持つ強歪εn の歪目印部52を点在か散在させ、歪分布データε(X)を処理する二次演算部には、歪分布データε(X)から分別幅Nn(N≦Nn<S,Y)より幅Wの短いパルス状波形部分を抽出して歪目印位置Xnを特定する歪目印検出手段と、その歪目印に基づいて歪分布データε(X)に位置修正処理を施す位置修正手段を設ける。
(もっと読む)
軌道検測装置
【課題】レールに対する基準アームおよび可動アームの位置決めが容易で、測定精度を高めることができる軌道検測装置を提供する。
【解決手段】基準アーム11が、レール1aの内側面に接触するよう設けられた基準ガイド部材11dと、レール1aの内側面が面する方向に突出するよう設けられた基準側突出部11eとを有している。可動アーム12が、基準アーム11の一端に自在継手22により水平方向および上下方向に回転可能に連結されている。可動アーム12は、レール1aの内側面に接触するよう設けられた可動ガイド部材12dと、レール1aの内側面が面する方向に突出するよう設けられた可動側突出部12eとを有している。圧縮バネ14が、ガススプリングから成り、両端がそれぞれ基準側突出部11eおよび可動側突出部12eに、基準アーム11および可動アーム12がレール1a上に設置されたときレール1aの長さ方向および幅方向に垂直となる軸を中心として回転可能に取り付けられている。
(もっと読む)
光ファイバセンサケーブル
【課題】建築物に埋設して正確に変形を検出でき、耐久性に優れ、コンクリート中でもケーブルが移動せずに長時間の歪モニタリングが可能な光ファイバセンサケーブルの提供。
【解決手段】歪検出用光ファイバと、温度補償用光ファイバがルースに収納された保護管と、抗張力体とをケーブル外被により一括被覆してなり、該ケーブル外被は、前記歪検出用光ファイバと前記保護管とが埋設された測定部と、前記抗張力体が埋設された抗張力体収納部とが、首部を介して連結された断面形状をなし、且つ前記首部には長手方向に沿って多数の窓部が形成されていることを特徴とする光ファイバセンサケーブル。
(もっと読む)
距離測定方法および距離測定装置
【課題】 危険を犯すことなく簡易に構造物間の距離を算出することができる距離測定方法及び距離測定装置を提供する。
【解決手段】 本発明の距離測定方法は、レーザを利用して、直線状に延びる第1及び第2構造物間の距離を測定するための距離測定方法であって、前記第2構造物上の一点と、前記第1構造物上の二点とに向けてレーザを照射すると共に、該レーザの反射光を受光するレーザ計測ステップS101と、前記レーザの照射方向および該レーザを照射してからその反射光を受光するまでの往復時間に基づいて、前記一点および前記二点の三次元座標を算出する座標算出ステップS103と、前記三次元座標に基づいて、前記第1及び第2構造物間の距離を算出する距離算出ステップS105と、を含むことを特徴としている。
(もっと読む)
トロリー線の摩耗管理方法及び摩耗管理装置
【課題】検出系による異常データを判別して、不要な現地確認作業を削除することができるトロリー線の摩耗管理方法及び摩耗管理装置を提供する。
【解決手段】1ドラムに該当する区間のトロリー線の残存直径hiをn個計測しておき、n個の残存直径hiのデータを用いて、n個の残存直径hiの平均haveを求めると共に、不偏分散σ2=Σ(hi−have)2/(n−1)を求め(ステップS1、S2)、各残存直径hiが、信頼度99%の区間推定値μ[但し、have−2.58×σ/√n<μ<have+2.58×σ/√n]の範囲内に有る場合には、正常データと判定し、上記区間推定値内にない場合には、異常データと判定するステップS3〜S5)。
(もっと読む)
光走査式平面検査装置
【課題】 透明フィルム上の突起、窪み、折れなどの平面異常による不良を高速に検査するにあたり、反射率や透過率から検査する方式の表面検査装置では平面異常だけを選択的に検出することは非常に困難であった。またレーザ光を使った凹凸測定による検出方法では表裏の反射光を分別できず正確な測定ができなかった。
【解決手段】光源より出射された光を、前記平面に対してライン状に走査する光走査手段と、該走査光による該平面および平面異常部からの透過光を受光する反射光位置検知手段と、該検知手段からの検知信号により該平面異常部の角度を算出して平面異常の検査を行う角度検査測定部と、を有する光走査式平面検査装置とした。
(もっと読む)
着色トレーサ異常検出装置および異常検出方法
【課題】光ケーブル用スペーサに付与した着色トレーサの異常を全長にわたって確実に検出する。
【解決手段】着色トレーサ異常検出装置は、撮影カメラ11、照明12、背景用反射板13、演算装置14、およびモニター15を備える。演算装置14は、撮影カメラ11で撮影した画像から、着色トレーサのヤケカスやブツの異物を検出する。この演算装置14では、撮影カメラ11で撮影した画像を取り込み、その画像データに対して光ケーブル用スペーサ1の進行方向に微分処理を行い、さらに所定のしきい値を用いて二値化処理を行って、得られた二値化データに従って着色トレーサの異常を検出する。
(もっと読む)
光ファイバセンサケーブルとその製造方法
【課題】製造及び配管等への施工が容易であり、高温環境下で配管の変形、減肉等に起因する歪を分布的に安定して検知することが可能な光ファイバセンサケーブルの提供。
【解決手段】長尺のセンサ基材と、該センサ基材の一方の面上に長手方向に沿って固定された少なくとも1本の歪検知用ファイバと、センサ基材の前記一方の面と反対側の面に長手方向に沿って配置された絶縁用フィルムとを有することを特徴とする光ファイバセンサケーブル。
(もっと読む)
長尺物の外観検査方法及びその装置
【課題】外観検査を高精度で行うことのできる長尺物の外観検査方法及びその装置を提供する。
【解決手段】各照射装置10に対してホースHを長手方向に移動させながら、照射線Lを所定時間おきに撮像し、各撮像データからホースHの各幅方向位置と照射線Lの高さ方向位置とを対応させた高さ方向位置データをそれぞれ抽出し、各高さ方向位置データを基準データによって減算処理するとともに、減算処理された各高さ方向位置データを所定の色調基準に基づき撮像順に並べて検査用画像を作成する上で、減算処理対象の高さ方向位置データ及びその高さ方向位置データと撮像順が近い所定回数分の減算処理前の高さ方向位置データをホースHの各幅方向位置ごとに平均化して基準データを作成する。これにより、ホースHがうねりを伴っている場合でも、高さ方向位置データからうねり分がキャンセルされる。
(もっと読む)
軌道変位測定システム
【課題】軌道の静的変位を測定できるようにする。
【解決手段】静的変位を測定したい部位2Bに第1ターゲット3を掲示し、動的変位のみが発生し静的変位は発生しない部分に第2ターゲット5を掲示する。第1ターゲット3の実変位(動的変位+静的変位)は第1カメラ装置4及び第1変位算出手段7によって求め、第2ターゲット5の変位(動的変位)は第2カメラ装置6及び第2変位算出手段8によって求める。そして、第3変位算出手段9によりそれらの差分を求めることにより、第1ターゲット3の部分2Bの静的変位のみが抽出される。
(もっと読む)
光センサにおいて低速光を使用するためのシステムおよび方法
光センサは、少なくとも1つの光結合器と、少なくとも1つの光結合器に光学的に連通する光導波路とを含む。光導波路は、当該少なくとも1つの光結合器から第1の光信号を受取るように構成される。第1の光信号は、光導波路の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、回転、歪みまたは温度のような、光センサの少なくとも一部分への摂動によって影響される。 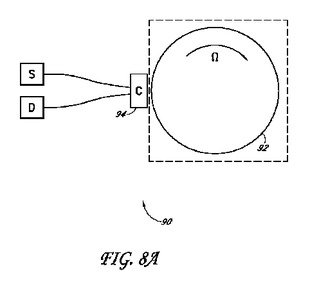 (もっと読む)
(もっと読む)
条材の測長方法とそれを用いた切断方法
【課題】長尺の条材を高精度でかつ短時間で測定する方法と、この測定する方法を用いて効率よく定尺長さに切断する方法との提供である。
【解決手段】ビレット28を搬送装置10により搬送しつつ、第一センサー18と第二センサー20とで搬送方向先端と後方とを検索する。第一センサー18がビレット28の先端を検出してから第二センサー20がビレット28を検出しなくなるまでのパルス数を測定する。搬送装置の1パルス当たりの搬送距離Pとパルス数とを乗算して通過長さL2を算出する。第一センサー18と第二センサー20とにより定まる間隔長さL1にこの通過長さL2を加算して、ビレット28の長さを算出する。このビレット28は、この長さ情報を基に切断装置12で定尺に切断される。第二センサーを複数にしてビレット28の後方を検索してビレット28の長さを算出してもよい。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】2値化ラインセンサ画像の途中でトロリ線がなくなると画像を上下に横断していないのでトロリ線として認識せず背景のノイズとして処理してしまう問題を解決する。
【解決手段】ラインセンサ画像をMライン毎に区切って連続する番号を付したn番目のラインセンサ画像に対して、(n−1)番目のラインセンサ画像におけるMラインのうちのNライン(M≧N)であってn番目のラインセンサ画像に時系列的に連続する予備ライン画像及び(n+1)番目のラインセンサ画像におけるMラインのうちのNラインであってn番目のラインセンサ画像に時系列的に連続する予備ライン画像を連結して(M+2N)ラインよりなるラインセンサ画像を作成するので、画像の途中でなくなるトロリ線を背景のノイズとして処理することがなくなる。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】 剛体架線式において、トロリ線の摩耗部分と剛体部の反射部分とを区別し、トロリ線の摩耗部のみを白域とし、背景を黒域とすることにより、トロリ線の摩耗部分を抽出するにある。
【解決手段】トロリ線の種類を予め設定することにより、前記ラインセンサ画像中のトロリ線の最大幅に相当する画素数以上を持つ白域の部分を黒域に変換する手段61を備え、剛体架線式のトロリ線を撮像した2値化処理後のデータにおいて剛体部を白域から黒域に変換し、カテナリ式のトロリ線を撮像した2値化処理後のデータと同じ画面構成とすることができる。
(もっと読む)
電線端末部の芯線検査装置および検査方法
【課題】検査する電線の種類や寸法および形状のばらつき、加工条件や検査条件の変動に追従して判定基準を自動的にかつ適切に変更できるようにする。
【解決手段】本発明においては、検査する芯線2の外径に対応する特性値を計測するとともに、計測した複数の特性値の移動平均値と検査員が選択した許容幅とに基づいて判定基準を順次更新しつつ、更新した判定基準に基づいて新たに計測した芯線2の良否を判定する。これにより、電線1の種類や寸法および形状等の変動に追従して判定基準を常に適切なものに維持することができるから、芯線2の良否を正確に判定し続けることができる。
(もっと読む)
121 - 140 / 246
[ Back to top ]